Activity
Всем привет. Продолжу рассказ о моём гексакоптере
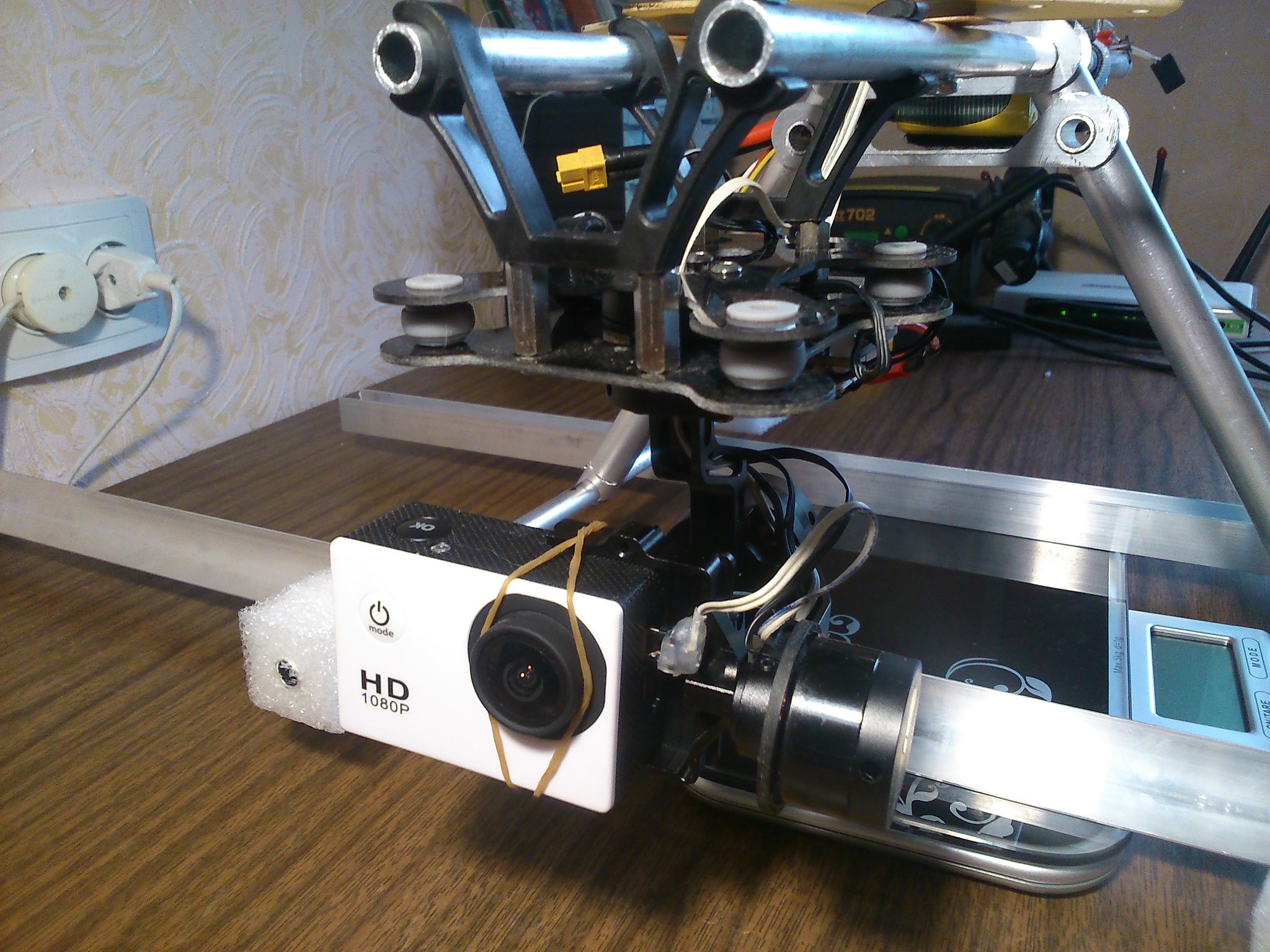
Пока мой коптер прибывал в состоянии некоторого количества разрозненных частей (после падения), я решил приобрести подвес и камеру. Подвес однозначно на AlexMos, 3-осный. По этим критериям нашёл подвес DYS3. По случаю нашёл в Москве. С камерой жаба победила в сторону SJ4000.
Подвес нужно к чему-то крепить, да и ножки нужны. Что делать в этой ситуации? Решил попробовать собрать что-то своими руками. Как основной критерий успешной разработки задал массу - 200гр и некоторый поворот камеры без попадания частей коптера в кадр.
- материал алюминий из ближайшего хозмага
- оборудование домашнее (дрель, напильники, ножовка)
- вынос камеры под передние лучи
- крепление 1-2 АКБ на шасси
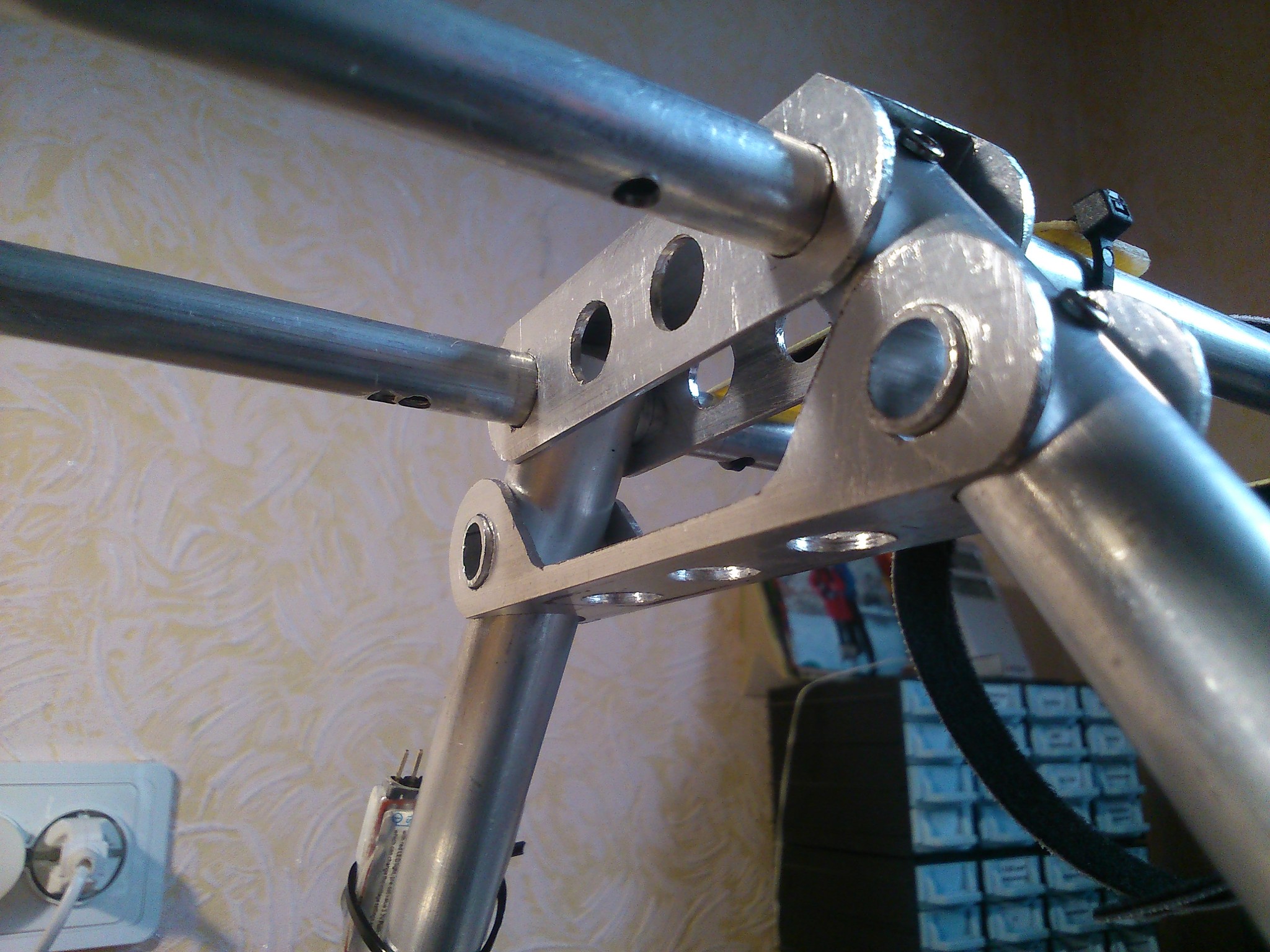
Собственно, не буду рассказывать подробно о сборке - сверлил да пилил. Трубки алюминиевые, 10 мм - полозья, 16мм - ножки, профили сверху
Первой идеей было крепление шасси к раме по центру:


После первых прикидок сказалась недостоточная прочность на кручение, усилил профилем, перфорировал его, добавилось 12 грамм.
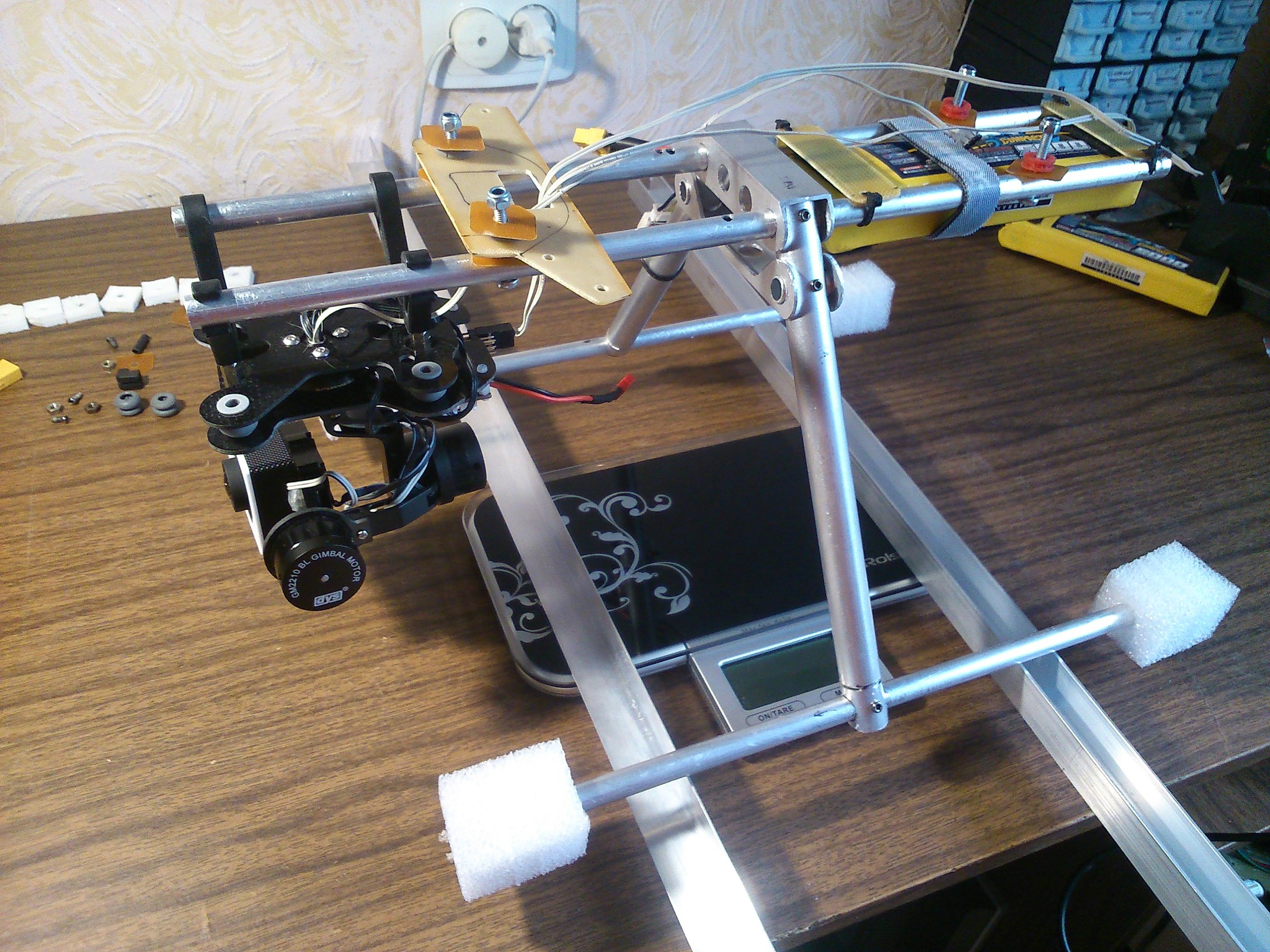
Подвес с камерой первоначально планировался балансироваться 2мя АКБ:


Но из-за того, что камера вынесена далеко вперёд, ничего не получилось. Пришлось выносить аккумулятор назад.
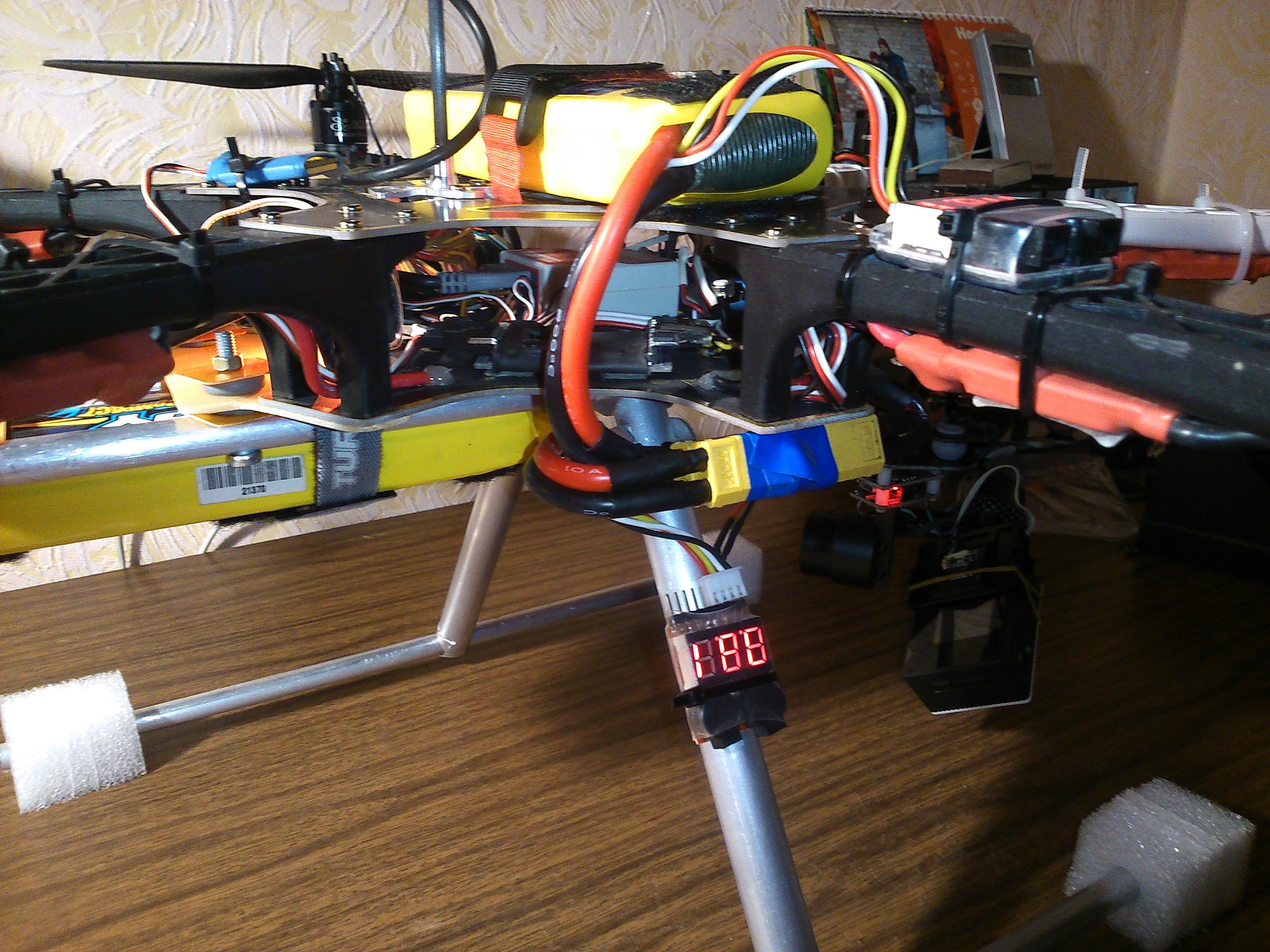
После первого небольшого вылета получился эффект качелей, из-за недостаточной упругости демпферов всё шасси раскачивалось.
Перенёс точки крепления шасси. Так получилось и надёжнее, в случае падения центральная плата должна выжить.

Демпферы пока не подобрал, этот узел в стадии отладки. Желе присутствует(
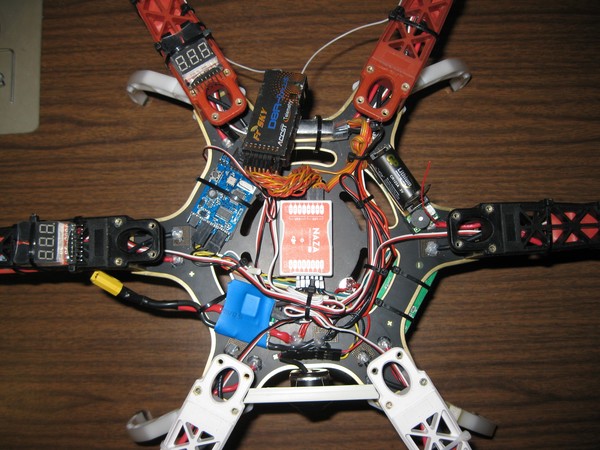
Вот так теперь закреплены 2 АКБ на коптере:
Пустое шасси весит 245 гр. Много это или мало?
В сборе выглядит так:
И общий вес аппарата:

Значит, много(( Ну а что делать? Загоняю в калькулятор для проверки:
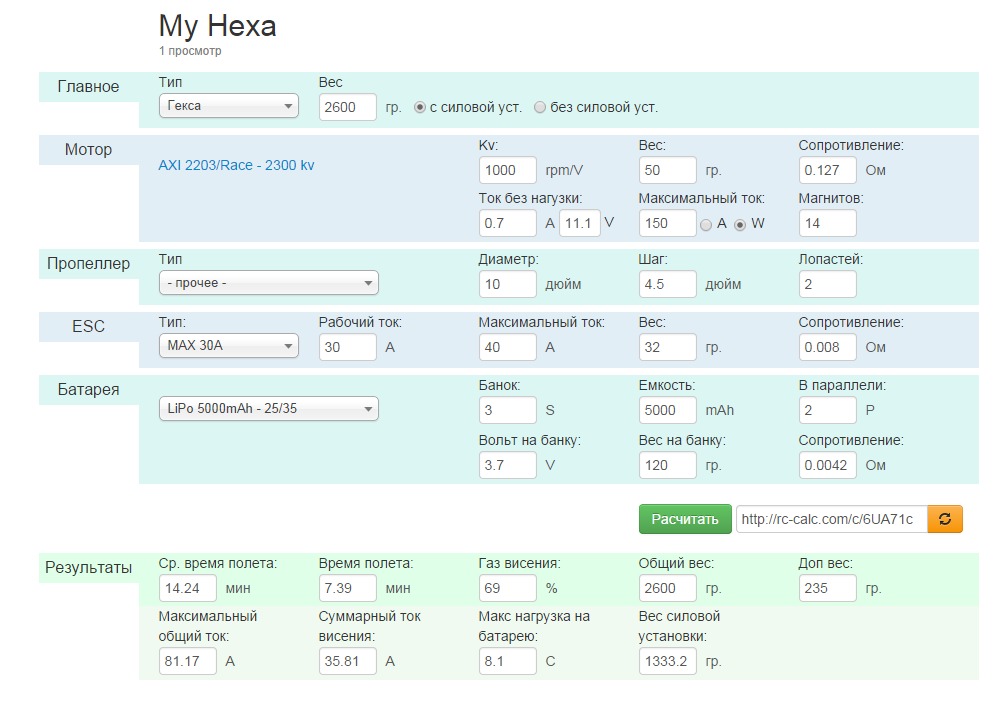
Да идеала далеко… Практически по пульту получилось 60-65% газа в режиме manual.
И вопрос практический: можно ли без вреда отрезать ненужные ножки с RCTimer’овской рамы? Это лишние 30 грамм.

После пробных полётов задумался о пульте для оператора…
Всем привет! Решил вести здесь свой дневник, о жизни и здоровье моего первого и единственного летающего аппарата. Скоро ему исполняется 1 год и этот год был насыщен событиями, взлётами и падениями, радостями и разочарованиями. Окрылённый мечтой летать и снимать красивые видеоролики, я устроился на вторую работу и смог приобрести это чудо инженерной мысли. Рассказ мой длинный, снабжен картинками для развлечения)
Отдельно хочу поблагодарить Виталия (KBB) за помощь в выборе и настройке коптера!
Итак, вот что было куплено у Китайцев:
www.rc711.com
Плата управления: DJI NAZA-M V2 GPS
www.rctimer.com
Рама, двигатели, регуляторы, винты: HP-550 Black Multicopter Sets
www.hobbyking.com
Пульт: Turnigy 9XR Transmitter Mode 2 (No Module)
Аккумулятор: HobbyKing 1500mAH LiFe 3S 9.9v Transmitter pack
Передатчик: FrSky DF 2.4Ghz Combo Pack for JR w/ Module & RX
Дисплей для телеметрии: FrSky FLD-02
Аккумулятор (4 шт): ZIPPYCompact 5000mAh 3S 25C
Зарядное устройство 12В и 220В: IMAX B6 Charger/Discharger 1-6 Cells (GENUINE)
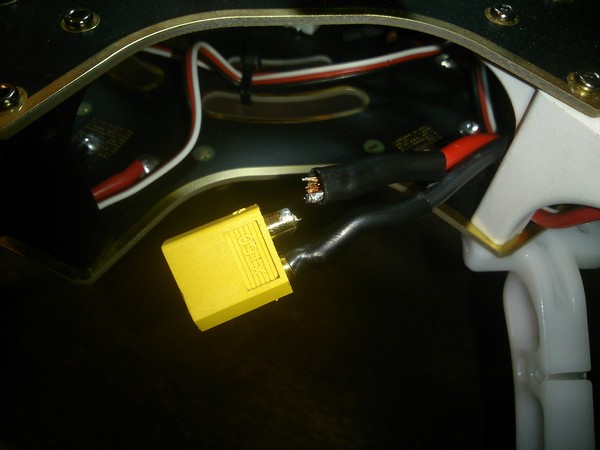
Разъемы для подключения аккумуляторов: NylonXT60 ConnectorsMale/Female (5 pairs)
Собственно, не буду рассказывать о муках выбора, постоянных столкновений с жабой, сборке и прочих перипетиях.
Расскажу вкратце о его жизни.
При покупке он выглядел так:
content.foto.my.mail.ru/mail/…/h-730.jpg (786 Kb)

После сборки:


А вот и самый первый полёт:

Вы только посмотрите - как моё лицо излучает радость!
Никому не интересно читать, что я тут подпаял, тут прикрутил. В основном расскажу о самом интересном. О падениях и ошибках!
…До этого я летал только в симуляторе на компьютере. Как стало ясно позже, симулятор абсолютно не застрахует вас от падений. Я тоже думал - “вот, буду летать блинчиком и никаких падений!”.
А на самом деле их было 6.
Как бы горестно это не звучало, первое падение случилось уже через неделю после первого полёта.
Падение №1/


Первое падение было “учебным”. Полетел в слегка ветреную погоду с Atti+GPS. Полетал 2 аккумулятора, решил попробовать блестящий тумблер Manual. Полетал вокруг, полетал вверх-вниз. Взлетел выше насыпи, а там ветер оказался порывистый. Коптер накренился сильно, снизился и стал улетать. Я испугался такого поведения и вместо режима Att+GPS включил FailSafe. Не учёл, что на это нужно 5 секунд. После этого он просто упал боком.
Итог: минус луч, минус 2 винта.
Падение №2. Приехал в любимую деревню. Конечно же, летать везде, пугать кур и пр. Но что-то GPS не находится? Долго искал, минут 10. Надоело, полетал в Atti. Стал выписывать крутые повороты, вертеться как волчок. Включил GPS. Коптер пошёл боком в землю. Хорошо, на пути попалась яблоня. Оказалось, из-за горы, которая рядом с домом, GPS принимает плохо, 4-5 спутников.
Итог: вс (603 Kb)ё обошлось
Падение №3.


Решил вновь проверить FailSafe. Отлетел на 50 метров, выключил пульт и стал наслаждаться. Думаю, если сядет плохо, то всё равно в мягкий, пушистый снег. Всё как по инструкции. Вот, коптер уже идёт на посадку. Ну а что мне садиться, ещё полаккумулятора, полечу сразу дальше! Включаю пульт, при включении вижу привычную надпись “Throttle is not idle”, перевожу газ в ноль. Да. И коптер падает с высоты 1.5 метра. Представьте, чистое поле. Справа снег, слева снег, за и передо мной снег. А вот 50x30 см участок - наледь. Уже догадались, куда коптер упал?
Итог: мороз, поэтому 2 луча, 2 винта.
Падение №4. Летал зимой в поле. Ветер тоже достаточно сильный. При маневре коптер не выправил своего положения, продолжил лететь боком. Еле-еле его вернул, максимально отклонив стик вправо. Сел, проверил всё, подергал, перекалибровал компас и полетел снова. Через 3 минуты похожая ситуация, но стика вправо не хватает и коптер улетает в горизонт. Пришлось экстренно сажать в сугроб. Благо, снег мягкий. И для меня открылась тайна:

Комплектный скотч для Назы на морозе отклеивался! При это дома, в тепле - его невозможно было оторвать!
Итог: всё цело, пострадали нервы.
Падение №5.

Прошло полгода. Полётов было немного, 30 где-то. По часу. Но уже насобачился. И вот на Орешке встретил ребят из нашего Рязанского авиамодельного клуба! Летали на бойцовках. Меня это зрелище впечатлило! После флегматичного коптера за бойцовками даже глаза не поспевают! И снова решил попробовать Manual. Ну а что нет-то? Полетел на высоте метра 3. Чтобы если что, то мягко. Не помню подробностей, но зарулился и упал в грязь. Хорошо, вроде никто не видел))
Итог: минус 2 луча, минус 2 винта, ножка. Винты закончились, пришлось ждать новые посылки.
Попутно вскрылся ещё один всемирный заговор:
Хорошо что на столе…
Так же накопил денег и помимо запчастей на ремонт заказал себе FPV:
Поисковый маяк: Peleng
OSD: Cyclops Breeze OSD pro V1.1
Видеопередатчик: AOMWAY 1000 mW Tx
Видеоприёмник: 32-chan 5.8G diversity reciever
Антенна передатчика: 5.8G cloverleaf antenna 3 lobes for TX
Антенна приёмника: 5.8G cloverleaf antenna 3 lobes for RX



После 2 месяцев перерыва возобновил полёты. Камеру поставил заднего вида от моей машины. Видимо, в это время я и убил аккумулятор №1, он вздулся. На нём одном решил развить TOP SPEED. Со снижением и “газ в пол”. Получилось около 65-70 кмч. При смене аккумулятор был горячим… Сейчас же он таскает коптер всего 3 минуты вместо 8-10. Собственно, теперь нельзя использовать его в паре с АКБ №2.
Падение №6. И вот прекрасный тихий холодный весенний вечер. Летал из машины в Atti+GPS, визуально не наблюдал.
Прилетел на дозаправку, сменил аккумулятор, полетел дальше. Чувствую, что сразу летит очень плохо, швыряет из стороны в сторону и не компенсирует горизонт. Сразу дурные мысли об отклеившемся контроллере, мотор заклинивает, винт поломался… Повернуть не получается, сразу сваливание. Захожу на посадку по-самолётному. Опыт пилотирования Ил-2 штурмовик проявил себя, управление не теряю. Ищу коптер в небе - а там! Его колбасит так, что любой брейкдансер напьётся от горя! Отпусти стики для стабилизации. Вверх-вниз метра на 2, влево-вправо… Пока две секунды соображал как быть, коптер пошёл свечкой вниз. Метров с 30-40…


Разгадка проста. Пока менял аккумуляторы, пульт висел на ремешке на шее. Наклоняясь, перевёл тумблер в Manual. Взлетал на коптере и не посмотрел на индикатор Назы. Он просто не был включен.
И всё это время летал в ручном режиме. Естественно, коптер никак стабилизироваться и не мог.
Итог: минус 1 мотор, 2 луча, 2 платы, 4 винта, 2 ножки, вырван разъём с видеопередатчика, камера, ножка антенны GPS, повреждены провода антенны GPS OSD, 2 дня депрессии…
Дальше запчастей не хватило, пришлось ждать новую посылку. В связи с этим опять перерыв в 1.5 месяца.

Попутно были куплены новые детали:
Подвес: DYS Smart3
Камера: SJCAM SJ4000
На шасси финансов не хватало и решил попробовать собрать своё. Об этом в следующем дневнике Пора заняться съёмками