Activity
У меня же работало, и я думаю у всех остальных тоже. Уже много лет как 2.8 в эксплуатации, и никто вашим путем не ходил. Это не заставляет спросить себя, как тогда работает у остальных?
У меня было два АПМ2.8 - ОСД всегда работало штатно, без пересборки прошивки и таких долгих ухищрений.
Варианта там было два - нажать кнопку Enable OSD в Гуе, либо подключить параллельно с ОСД блютус.
Как людям удается придумать себе проблемы на ровном месте, всегда удивляет.
ПВМ для Ардуины хорошо задокументирован, возможно использование этих же принципов?
firetailuav.com/…/reading-pwm-signals-from-an-rc-r…
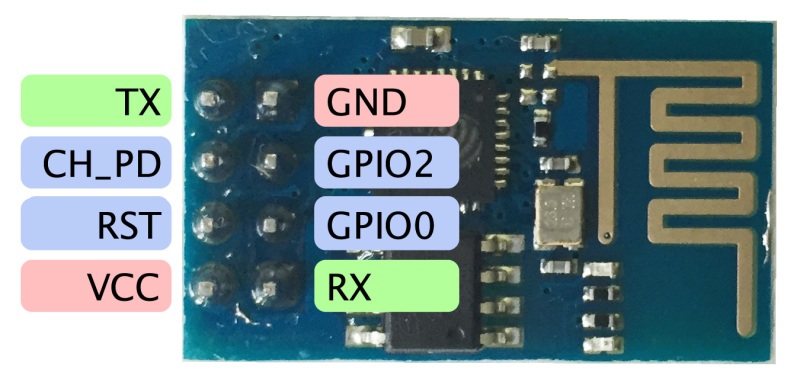
ГПИО2 можно задействовать?
Валерий, спасибо большое за ответы, и за прошивку! Возможно, нашел еще удобные решения:
www.ebay.com/itm/…/111819907565
dx.com/…/esp8266-serial-wi-fi-wireless-esp-01-adap…
Но есть загвоздка, у ESP-01 некуда подключить ППМ. ГПИО14 не разведен.
Видимо из готовых, только такой можно брать
www.ebay.com/itm/…/181854783969
И хотел еще уточнить, можно ли сделать поддержку ПВМ? У меня на ППМ нету свободных каналов.
Валерий, еще было бы здорово все ссылки поместить в основную запись, и ссылка на разводку платы битая.
Валерий, а можно ли сделать это на таком модуле?
banggood.com/2_4G-Wireless-Wifi-Telemetry-Module-W…
Если нет, то возможно есть уже готовая плата, под которую не нужно делать еще одну, среди этих?
www.banggood.com/search/esp8266.html
У таймкопа написано, что этот барометр низкого разрешения. Все же лучше брать с нормальным тогда.
Тогда буду держаться от Спрф3 подальше.
Хорошая идея на счет Назе6. Там только баро стоит совсем мелкий BMP280. Он достаточно хорош?
А на SP Pro Racing F3 тоже нет отключения встроенного компаса?
Сама идея этого проекта мне тоже нравится, потому что с удовольствием перешел бы с Маховика на 32 битную платформу, еще и более дешевую. У него, кстати тоже очень хорошо работает удержание высоты.
Но хотелось бы тогда понять, чем ваш подход лучше чем в АПМ и Рево. Железо, по сути, везде одинаковое, и для автономных полетных режимов принципиальная разница в качестве работы, сейчас, только в прошивках.
Вот тут я не могу с вами согласится. Я уверен, что с кодом у Назы все в порядке. При таких колоссальных продажах, у компании достаточно ресурсов, что бы написать безбаговый код. А отсутствие бесконечных обновлений, как у Ардупилота, говорит о том, что они выпускают сразу надежные прошивки. И я уверен, что Наза никуда просто так не улетает, потому что создать условия для улета практически любого контроллера, возможно и без ошибок прошивки.
А вот как раз код, который пишет один человек, заставляет сильно задуматься о его надежности, соответственно использовать его на дорогом коптере несколько рискованно, а дешевых у меня нет. Поэтому ваш проект очень интересен, но какие преимущества он дает перед тем же Ардукоптером, где все уже реализовано и неплохо работает, и нет проблем с отключением компасов?
Учитывая и то, что на мелких коптерах функции GPS тоже не нужны для фристайла и гонок, а там где они нужны, можно использовать Рево, который уже продается по 40$.
А совсем стабильного кода нет? А то трудно выбрать между совсем нестабильным и более-менее стабильным. 😃
Еще одна большая проблема, это компас. Он стоит на плате и на него идут сильные наводки, единственный вариат, это подключить внешний компас, но на платах Назе это невозможно, потому что невозможно отключить внутренний. Очень не продуманно.
Можно его конечно вырезать, выкусить, выпаять, но хочется, что бы все было по человечески.
А в чем преимущества перед квадром?
Коллегу на работе мысль посетила - почему не поставить пару видео-камер - допустим в кабину пилотов, и снаружи - и передавать изображение + звук на землю? Думаю современные технологии позволяют. Почему не делают?
Я тоже думал, что бы передавать, но только телеметрию, как у АПМа )
Видео передавать сложнее и бесполезнее. А вот показания приборов и звук например, совсем другая картина.
А вы бы в такой ситуации как разговаривали?
В такой не знаю, но они так еще до этой ситуации начали разговаривать.
Вроде летчики, а разговаривают как упоротые дворники. Противно. Ввели самолет в штопор и что тут уже бороться? Пишут, что вывести шансов нет. Но впечатление, что они даже этого не поняли.
Страшно летать с такими летчиками, если у нас таких много.
Почитал про другие катастрофы - везде наши доблестные летчики то в бочку входят по пьяни, то спят за рулем. Как это вообще?
😃
А во втором скетче нормальные значения? Может его взять за основу?
Там все просто:
0,0,1111111010010010,101111000,1101111111010001
0,0,1111111010011110,101101111,1101111111010111
0,0,1111111010011010,101110101,1101111111001101
0,0,1111111010001101,110000011,1101111111010000
0,0,1111111010001111,110000100,1101111111001101
0,0,1111111010011010,101111000,1101111111001011
0,0,1111111010101000,101111100,1101111111010001
0,0,1111111010100001,101111110,1101111111010000
0,0,1111111010011000,110000011,1101111111001010
0,0,1111111010010111,110000001,1101111111010000
0,0,1111111010100010,101111001,1101111110111111
0,0,1111111010011001,101111010,1101111111001010
0,0,1111111010011100,110000100,1101111111011000
С другим скетчем вот так выглядит i.imgur.com/8521I7Y.png?1
Вроде работает, но с несколько странными показателями! 😃
Ну вот, приехали. У меня ком 26 а в программе максимум 7 😃
Спасибо! Заработало конечно! Только у меня такой квадр, что к нему телефон прислонить только сбоку можно! ))))
Так что буду сейчас шить Ардуину.
Попробовал подключить пока через телефон - не пошло.
В связи с чем несколько вопросов:
- Какой выставлять IP - как у wifi соединения на Андроиде?
- Почему в программе стоит подчеркивание перед адресом порта?
- Как понять, что стрим попадает в компьютер?
У меня промини 328 - значит то-же самое.
Спасибо! Так и запишу. )
А какое значение считается очень хорошим?
Виктор, а это хороший показатель? Wireless receiving sensitivity: <- 92dBm power
Спасибо большое!
На каких выводах SCL SDA, стандартно а4 а5?
Блютус на 9600 конфигурировать?
Данила, а вам не сложно было бы сделать полный код для Ардуины и МПУ? Откомпилить и залить я могу.
Это просто замечательно. У меня есть все компоненты. Можно проверить.
Данила, спасибо за ответ.
С Тройкой тоже хорошее решение, конечно дороговато она стоит по сравнению с МПУ за 120р.
А датчик на Тройке лучше или хуже, чем МПУ? Если хуже, то точно стоит на МПУ сделать.
По поводу блютус, предполагаю, что если взять обычный HC-06 и подключить к TX-RX, то должно коннектится к компу, как и на любых полетных контроллерах.
Тогда бы получился дешевый и очень удобный прибор для измерения вибраций еще и с пропеллерами на раме.
Ардуинка с акселем и БТ получается около 300р. Грубо.
И вот у меня еще идея появилась - можно его даже использовать для записи лога вибраций в полете!
Это давало бы возможность видеть вибрации всей рамы в реальных условиях полета.
Очень хорошая разработка, потому что очень нужная!
А какой код нужно заливать в ардуину с припаянным мпу6050? И можно что бы тоже работало через блютус? Мне кажется будет еще удобнее.
А вы случайно не взвешивали EMAX 2216 вместе с пропадаптером?