Activity
Ребята,с этой платой у этого продавца решены проблемы,5в (до 1,5А) нормально дает ?
Как к этой плате подключить компас и как отключить встроенный и какие у нее проблемы,кто имел дело?Мне нужно на одной плате обязательно:
*мозг
*OSD
*BEC 5в х 1,5А(честных)
*датчик тока
*подключение GPS и компаса
Хочу заметить что компаса тут нет. Я брал тут www.aliexpress.com/item/…/32828933953.html (на 10 дешевле). Если нужен нормальный бэк то я бы взял отдельный. Например www.aliexpress.com/item/…/32832748595.html или www.aliexpress.com/item/…/32833698273.html. Встроенный выдает 4.5 В. Я догадываюсь с чем это связано, но не переделывал. По датчику тока ноже есть нюансы, если токи будут больше 100 А (не помню какой предел точно, есть где-то виде), то надо менять резистор (в обвязке датчика тока ), что бы поднять предел.
Почему такая не любовь к АПМ/арду,стабильна же?
Тупо железо слабое.
Всем спасибо огромное кто ответил, тогда второй вопрос, реально ли на осд имея аппу Flysky fs-i6 запустить rssi (уровень приёма аппаратуры на осд экране) и куда подключиться имея схему???
Блин, 2 раза уже видео сбрасывал, вы его смотрели? Там есть настройка RSSI. Ничего дополнительно не надо подключать никуда. Надо аппу прошивать. Но RSSI съедает 1 канал.
Разве что апм-прошивки, наверняка, туда никак не воткнуть, да и слава Богу )
С АПМ не воткнуть, а вот с pixhawk вполне.
я к тому, что косяков в айНАВ давно уже не замечал, а летать на нём начал с версии 1.4 вроде. А про клоны я лично вообще ничего не имею против, т.к. на них всегда и очень доволен и омни Ф4 и Ф4.
п.с. а по функционалу… может там чего-то и больше, но … он старррр… он суперстаррр… )) А по точкам и айнав летает отлично. Ну а как допилят ПОИ - даже вспоминать наверное про апм перестанут (хотя, говорят, он там вроде и для машинок и катеров используется - вот единственное преимущество на мой взгляд).
Вполне согласен, того функционала что есть а iNav вполне (как для меня). Но знатоки типа нос воротят, берите говорят pixhawk. Но учтивая цену, мне и F4 сгодится. Да и stm как-то по перспективней avr и по цене куда как демократичней. Да и в конце концов, мы же сами собираем. А тем кто хочет без косяков можно посоветовать mavic 😉.
наверное вы хотели написать “айНАВ” на “косячных клонах”?
Ну, iNav по функционалу не дотягивает до MissionPlann, пока. И косяков хватает, как ни как он моложе. А что в клонах не нравится? У меня уже 2 и вроде норм, все работает. Больше заморочек с настройками тех функций что мне надо, инфы по iNav все же меньше.
Не думайте даже в сторону АПМ. Контролер придуман в 2010 году. Когда перешёл с АПМ на F4, сразу разницу заметил. Даже косячный iNav на F4 в 100 раз круче летает, чем крутой Милан планер на АПМ. Есть прошивки и для F4. Прошивай и радуйся.
Справа вверху, Rx-1, Tx-1, +5в и GND. Соответственно 2 провода питания с приемника подключаем +5в и GND (за питать можно откуда угодно). 3-ий провод (дата) подключаем к Rx. В настройках портов активируем UART 1 в колонке Rx включаем Serial RX. Сохраняем. Переходим в конфигурацию в ресивер моде выбираем serial-based receiver. Ниже iBus. Сохраняем. Если не заработало, перепрошиваем с нуля и повторяем настройку (мала ли чего понастраивали).
говорят матек 405 ЦТР новый фаворит, но пока отзывов не видел. А так из именитых тот же матек АИО.
Однако пока летаю на Омни Ф3 про и проблем не ведаю (т.т.т.), На фото слева внизу разъём для айбуса вообще-то. Вы схему смотрели? Там и сбус работает без всяких инверторов. УАРТ1/сериалРХ
сбус работает,
сбус работает, а iBUS нет. Зачем главу ломать. Я же показал через что работает iBus с аппаратурой FS-i6. Могу сказать больше. Можно приемник FS-IA6 (без “B”) подключить по iBus и иметь 10 каналов.
Парни, подскажите, у меня полетный контроллер Omnibus F4 V2.1 приемник FS-A8S, аппа FlySky FS-i6. Как настроить RSSI и протокол I-BUS, потому как сейчас работает только по PPM.
А куда ты подключал приемник? К каким пинам на Omnibus F4 V2.1 ?
Вот подключение по iBUS,
также настройка и задействование выходов на 5 и 6 моторы.
www.youtube.com/watch?v=3IEA0w3LqFI
Тут еще немного про подключение по iBus и по RSSI
Все спасибо, получилось.
Не много не понял “вешаем его на свободный AUX в конфигураторе (AUX 9)”, это как?
А ткни плиз, где написано. Да нужен PWM. Но вот что-то у меня не получается настроить.
Подскажите пожалуйста как подключить управление подвесом. Полетник OMNIBUS F4 V2 PRO. Нужно управлять 1 осью подвеса.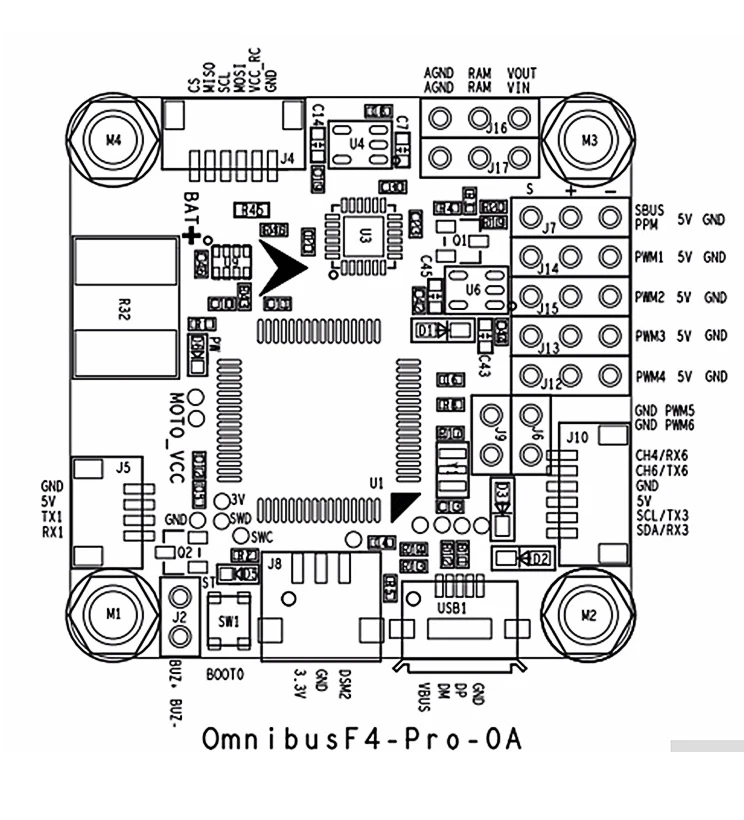
Да, немного перепутал Receiver=> Action=>Save Config сохраняет в памяти конфигурацию (при перезапуске)
GNSS Configuration… Открывает диалог для сохранения конфигурации приемника в файл на ПК или для восстановления
конфигурация из файла на ПК
Дока по проге u-blox.com/…/u-center_UserGuide_(UBX-13005250).pdf
теперь другой вопрос как можно конфиг перенести с одного модуля в этот??
Receiver=> Action=>Save Config, та есть и Load Config
Блин, посмотрел дата шит там 4 интерфейса uart, usb, spi и ddc. Вообще красота.
Щас замерил так там на осциллографе амплитуда почему то 10вольт
Так это не ответ от MAX? Она может.
Output Voltages
T_OUT…±13.2V
R_OUT…-0.3V to (VCC + 0.3V) Short-Circuit Duration
T_OUT …Continuous
Не туда смотрите. Ниже таблицу посмотрите. Ну и заголовок для чего микросхема нужна.
я тут смотрел …maximintegrated.com/…/MAX3222-MAX3241.pdf
Хотя поискал еще и в другом пишут • Accepts 5-V Logic Input With 3.3-V Supply. тогда вроде должна работать.
Вот согласно u-blox.com/…/UBX-M8030-KT-FT_ProductSummary_(UBX-1…. Есть поддержка uart, поэтому скорее всего можно напрямую подключить к usb > uart.
Не будет так работать.
Мне тоже кажется, посмотрите даташит. Там по уровням не проходит.
VCC…-0.3V to +6V
V+ (Note 1)…-0.3V to +7V
V- (Note 1) …+0.3V to -7V
V+ + V- (Note 1)…+13V
Input Voltages
T_IN, SHDN, EN …-0.3V to +6V
MBAUD…-0.3V to (VCC + 0.3V)
R_IN …±25V
Output Voltages
T_OUT…±13.2V
R_OUT…-0.3V to (VCC + 0.3V) Short-Circuit Duration
T_OUT …Continuous
Надо посмотреть дата шит на ublox8030, интересует максимальный ток по RX, TX. Посчитать ограничивающие резисторы на 5В и подключить на прямую RX, TX к uart. А питание как есть пустить через стабилизатор 3,3В. И думаю все будет работать.
Так, а на первом стоит MAX3232 ? Который рабочий.
Значит там на плате стоит стабилизатор с 5 на 3.3 а как тогда уровни конвертируются?
Уровни не конвертируются, просто стоят ограничительные резисторы (ну или нам хотелось бы). Стоит только стабилизатор на 3.3В - питание. Вообще, актуальный вопрос через что подключаешь? Был опыт пере прошивки FLYSKY FS-I6, так вот через китайский uart (что стоит на arduino uno) не завелся, а через FT232 (самодельная arduino uno) завелся и прошился.
Вы забыли между RS-232 адаптером UART-USB поставить MAX232. Уровни как-бы отличаются…
Не обязательно, хотя желательно конечно. Причем если это реальный RS-232 то там уровни гораздо выше 5В и тут да только MAX232. А если уже воткнули, возможно уже ничего не поможет. На современных материках вроде как реальных не ставят все uart. Хотя могу и ошибаться.
Привет, если кому интересно собрал прошивку для APM ArduCopter, на базе 3.2.1. Собирал для поддержки компаса m883. Я так понял что у кого-то еще остались модули GPS с этим компасам. Видео с инструкцией и под ним готовый hex .
-
Единственное пока частота обновления 1.5Гц, пока не допер как получают дефолтные значения для частоты 75 Гц. Считаются по этой формуле 0.64 Ga * 1024 counts/Ga для xy, -604 для z для 1.5Гц. Если кто знает как их пересчитать для 75Гц, подскажите.