Activity

Был озадачен поиском Rssi сигнала для FPV с Футабовских приёмников.
Здешний поиск, куда был послан для сыска нужной темы особо одарёнными господами - результатов не даёт ни каких. Просто ни каких.
И в дальнейшем выяснилось, что закрытые темы на этом форуме (оставшиеся без сообщений более 6 месяцев) поиском не рассматриваются. В итоге только получаешь результат по сообщениям о продажах и пустых рассуждениях.
Короче, Яндекс, Гугл в итоге рулит, и даёт ссылки на этот же форум в закрытых темах, где хоть что то можно найти.
yandex.ru/yandsearch?text=Rssi&lr=2
Размещу здесь подходящие ссылки и фотку 617, 6208 приёмника для себя, что бы не забыть.
Ну может кому ещё пригодится. И кстати по ссылкам можно найти много инфы и на другие Футабовские приёмники.
www.rcgroups.com/forums/showthread.php?t=923419
www.rc-cam.com/forum/index.php?showtopic=2569
www.rc-cam.com/forum/index.php?showtopic=234
mysite.verizon.net/res7yvp2/w4dh22/id2.html
www.rcgroups.com/forums/showp...3&postcount=12
www.aeromodelismovirtual.com/...ead.php?t=2416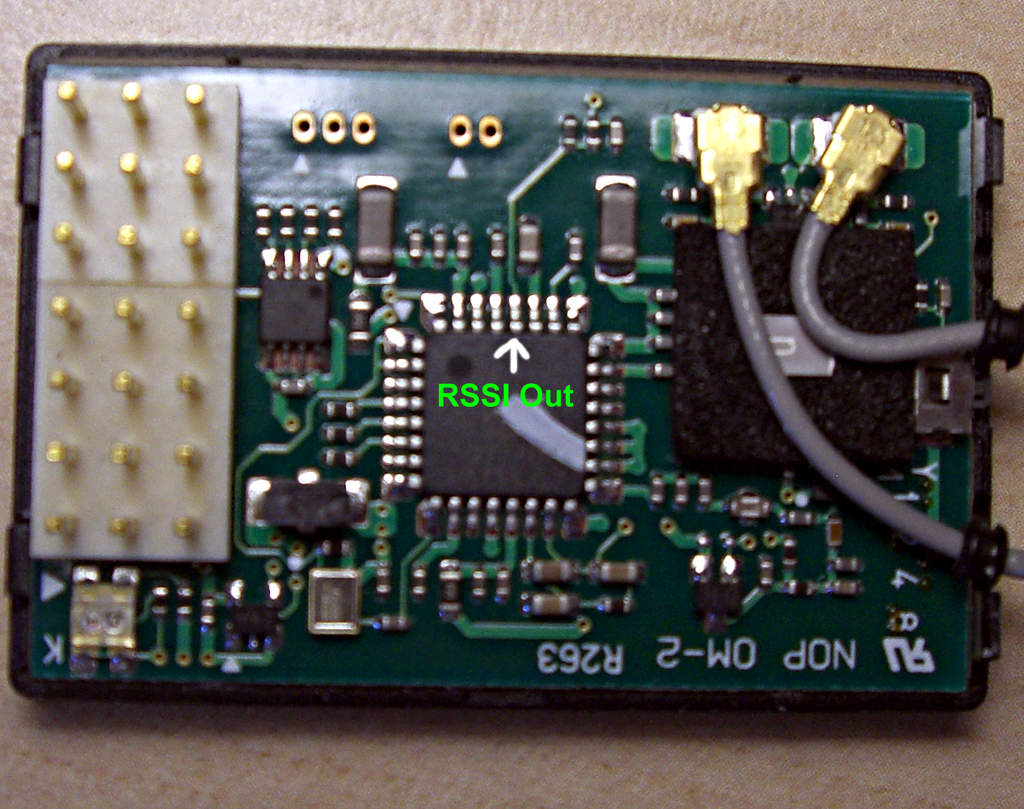
По описанию с rcgroups.com. FailSafe срабатывает при 0.06-0.07 V, а полный сигнал примерно 0.45 V.
У меня полный сигнал при лежащем рядом на столе передатчике получился 2,85 V, как ни странно. Ну это и почти норма.
Но всё таки Буффер нужен по любому.
www.dpcav.com/xcart/RSSI-Buffer-for-OSD-Pro.html
bbs.5imx.com/bbs/forum.php?mod=viewthread&tid=5704…
fpv-community.ru/…/51-vyvod-pokazanii-kachestva-pr…
Вообщем вся электроника осталась прежней, как на первой версии в моём дневнике. Разве что поставил более быстрые и надёжные реги под две банки ХР-7А, и они себя явно оправдывают.
А смысл переделки был вес, который вначале с первой рамой был 125 грамм. Затем довёл до 115 грамм. И всё таки летал довольно кирпично, что меня и не устраивало.
Короче выставляю новую супер лёгкую и крепкую раму из карбона под размах 15 см по диагонали моторов. Вес рамы 10 грамм, и всего квадрика 89 грамм с довольно не маленькой батареей 2S 450mAh. Летает отлично, теперь нет ощущения перегруженности. Осталось тонкую настройку ПИД выставить и будет чем занятся зимними вечерами дома.
Кстити последняя фотка рамы первой версии. Могу её отдать желающим в обмен на лист карбона 1мм с ХС.
Кто что на критикует, или подскажет?
Вот тут неделю назад вернулся из отпуска с “Российского” курорта под Кемером. Пегас Туристик отработал на твёрдую четвёрку.
Вообщем есть ещё там не плохие места.
Давно хотел попробовать создать миниквадрик, опираясь на имеющиеся знания и расчёты веса, размера и нужной тяги. И вообщем удачно получилось с первого раза, хотя и не очень верилось, что шаг и размер винтов подойдёт. Тем более что выбор маленьких винтов в продаже собственно жиденький.
Взял крестовину от WK UFO 8 и приделал её на карбоновую раму собственного производства. Вес без электроники и моторов составил 16 грамм.
Снял мозги X-Avr и приёмник Футаба с 0,5 метрового квадра, и с теми же настройками воткнул на малыша. Сменил только настройки отсечки до 68 (6,8в) т.к. летаем на двух банках.
Ну короче моторы эти www.hobbyking.com/hobbyking/…/uh_viewItem.asp?idPr…
Винты www.hobbyking.com/hobbyking/…/uh_viewItem.asp?idPr…
Реги бутербродом с двух сторон www.hobbyking.com/hobbyking/…/uh_viewItem.asp?idPr…
Карбон этот
www.hobbyking.com/hobbyking/…/uh_viewItem.asp?idPr…
Батарея из этих банок hobbyking.com/…/__11872__ZIPPY_400mAh_30C_Single_C…
Ну плата сами знаете - AirCam.
Вообщем летает на 400мА батарее 5,30 минут в помещении даже под вентилятором хорошо и стабильно, со своим почти 120 граммовым весом. А звук как от роя комаров.
Только плавная отсечка питания от моторов совсем не плавная вышла на двух банках. Предупреждающее мигание происходит за пару секунд до обвала оборотов. Определить просадку батареи можно по более ленивому поведению квадрика т.ч. летаем больше по таймеру.
Вот тут на работе пробывал.
Автор данной статьи Дмитрий Шохов, за что ему огромное спасибо. Размещена в моём дневнике для личной информации и распостанению не подлежит.
penolet.ru/content/110
Теория и практика
Недавно мне пришел двигатель 2211 1700об.в, не способный раскрутить нужный мне винт. После некоторых тестов был поставлен диагноз: где-то подкорачивает обмотку. Можно было просто оставить его на запчасти но мне захотелось его перемотать. Статей о перемотке двигателей на русском языке очень мало, и вот я, начитавшись заморских сайтов решил написать свое пособие по перемотке бесколлекторных двинателей.
Основным материалом для данной статьи послужили материалы сайта http://www.gobrushless.com
Итак, начнем. Для начала нужно определиться с проводом для намотки.
**Выбор провода. Сколько жил и какой толщины. **

Обычно,для намотки двигателей используется медный эмалированный провод. (ПЭВ-2). Такой провод можно купить на радио рынке и в магазинах с электронными компонентами.
С увеличением мощности мотора, требования к качеству провода сильно возрастают. Для решения этой проблемы некоторые используют несколько более тонких проводов вместо одного толстого. В этом есть несколько приемуществ:
1 - Толстый провод сложнее наматывать.
2 - На больших частотах возможно появление скин-эффекта (поверхностный эффект)
Вкратце, скин эффект это явление, когда электроны, протекающие через медный провод, двигаются только по поверхности провода. В этом случае центральная часть провода просто не используется и превращается в нежелательный вес. Проявляется этот эффект с увеличением частоты.
Применительно к нашим БК моторам этот эффект обсуждался несколько раз. Есть сторонники и того и другого лагеря.
Я думаю, что частоты в наших моторах не так велики и об этом эффекте можно не думать.
Для получения максимального КПД от мотора, необходимо стремиться получить как можно меньшее сопротивление обмоток. Чем меньше сопротивление, тем меньше потери в обмотке и тем выше эффективность мотора. Для достижения этой цели необходимо использовать как можно более толстый провод. Но толстый провод - означает меньшее количество витков и меньший крутящий момент.Пока вам не нужно сделать очень высокоскоростной двигатель, старайтесь намотать как можно больше витков для создания большего крутящего момента.
Слишком тонкий провод дает большое сопротивление, и вы не сможете пропустить нужный ток через двигатель. Если просто поднять напряжение, по закону Ома произойдет увеличение тока. Но потери в обмотках(нагрев) сильно возрастут , что приведет к разрушению двигателя. Т.е. для получения нужной мощьности - необходимо выбирать провод нужного диаметра.
Для модельных двигателей обычно используется провод диаметром 0.3-0.6 мм. Более тонкий провод позволяет намотать больше витков но и имеет большее сопротивление. Определить сопротивления вашего двигателя не так легко как кажется. Не пытайтесь измерить сопротивление менее 1 Ом, если у вас нет специального оборудования. Обычные цифровые мультиметры не предназначены для измерения таких низких сопротивлений.
Чтобы сделать жизнь немного проще, можно прогнозировать, сопротивление вашего двигателя путем измерения общей длины провода, а затем рассчитывать сопротивление, используя данные из таблицы. Таким образом, можно получить представление о том, какое сопротивление будет имеет ваш двигатель.
Я зашел в магазин “Чип и Дип” и купил катушку провода 0.4мм фирмы velleman. Надо сказать, что катушка 67 метров стоит 500р при простом походе в магазин и 380р при заказе через интернет. Так, что есть смысл сделать предзаказ.
Намотка мотора

Перемотка моторов - дело непростое. Потребуется довольно много практики, чтобы получилось красиво и качественно. В первый раз может потребоваться очень много времени.
Намотать 20 витков тонким проводом на зуб может оказаться довольно просто, но мы пытаемся намотать от 10 до 30 витков соответствующей толстой проволокой, что не всегда так просто.
Хитрость заключается в том, чтобы закрепить статор в какое нибудь приспособление, а затем, используя обе руки, наматывать витки с нужным усилием, чтобы обмотки получались более компактными. Это чрезвычайно важно, так как первый слой обмотки должны поддерживать следующие один или два слоя. Если первый слой намотан свободно, следующий слой может ложиться между обмотками первого слоя. Это создает общий беспорядок, и вы никогда не получите максимальное количество витков на зуб.
Правильно намотанный зуб имеет плотно уложенные слои и витки, которые должны выглядеть красиво и опрятно.
Для достижения такого результата необходимо много практики!
Схема намотки статора с 9 зубами
Основная схема намотки приведена на картинке ниже.
 Эта схема одна из самых простых с физической и логической точки зрения. Основной проблемой является подсчет количества намотанных витков. По началу вы будете постоянно сбиваться со счета, но это пройдет с практикой.
Эта схема одна из самых простых с физической и логической точки зрения. Основной проблемой является подсчет количества намотанных витков. По началу вы будете постоянно сбиваться со счета, но это пройдет с практикой.
Как можно объяснить этот эскиз в текстовом формате?
Существует простая форма записи для обозначения намотки:
Обычно статор мотается 3 проводами. Назовем их ‘A’, ‘B’ и ‘С’. Если смотреть на статор сбоку, то намотка провода по часовой стрелке будет обозначена заглавной буквой, а намотка против часовой стрелки - маленькой.
Таким образом,на схеме намотки 9ти полюсного мотора мы должны мотать все зубья в одном направлении, один за другим что видно в текстовой схеме “ABCABCABC”. Девять букв, по одной букве для каждого зуба.
Итак берем провод, оставляем около 10 см, и мотаем первый зуб по часовой стрелке. Затем перекидываем провод на 4й зуб и мотаем его. И в заключение мотаем 7й зуб. Потом вторым проводом мотаем зубья 2, 5 и 8. И в завершение третьим проводом мотаем 3, 6 и 9 зубья.
Итак возьмем наш моторчик, и удалим с него старый провод. Он был намотан проволокой 0.3мм. Количество витков на оригинале было 24. (Как китайцы умудряются столько витков намотать? не представляю )) )


Теперь отмотаем метр провода 0.4мм и попробуем намотать по приведенной выше схеме:



Переход с зуба на зуб я заизолировал термоусадкой (где-то вычитал…)
Соединение проводов
Итак, у нас есть намотанный статор и из него торчит 6 проводов. Три провода из них - это начала обмоток, и 3 другие концы. Упс… Вы не уверены какие из них какие? В этом случае, необходимо было заранее маркировать провода в каком либо формате, чтобы пометить их начало. Для этого можно использовать кусочки скотча с надписанными буквами или скотч разного цвета.
Итак, у нас есть 6 концов, но только 3 из них подключаются к контроллеру скорости. Теперь, чтобы завершить перемотку необходимо выбрать схему подключения (базируясь на желаемом предназначении мотора).
Существует две конфигурации которыми можно соединить выводы статора:
Первая называется Звезда (Star или ‘Y’), а вторая - Треугольник (Delta).


Каждая конфигурация предлагает немного разные свойства и влияет на мощность мотора. Однако, изготовители двигателей еще не решили, какая схема является лучшим вариантом.
Диаграммы ниже показывают электрические схемы для этих соединений.

 После этих картинок, сразу понятно почему эти схемы так называются.
После этих картинок, сразу понятно почему эти схемы так называются.
Как правило, соединение “Треугольник” выбирается, если вы хотите получить высоко оборотистый мотор и соединение “Звездой” используется для получения более низких оборотов двигателя и позволяет использовать большие винты. В следующем разделе эта разница будет рассмотрена более подробно.
Если рассмотреть соединение Треугольником и подать напряжение на два вывода, во всех обмотках потечет ток. Для демонстрации того как ток распределиться между обмотками, предположим, что сопротивление одной фазы равно 1 Ом. В этом случае, у нас есть фаза А в 1 Ом, соединенная в паралель с 2мя другими фазами B и С (B и С соединены последовательно) сопротивлением в 2 Ома. По закону Ома можно подсчитать, что 2/3 всего тока пойдут через фазу А и оставшаяся 1/3 пойдет через фазы B и C. Результирующее сопротивление которое увидит контроллер будет 0,66 Ом.
Если мы соединим выводы по схеме Звезда, то весь ток будет всегда идти через 2 фазы в любой момент времени.
Результирующее сопротивление для регулятора будет 2 Ома.
Если мы нагрузим мотор напряжением в 10В, то получим ток около 15А при соединении Треугольником и всего лишь 5А при соединении Звездой. Надо сказать, что соединение треугольником в данном случае дает большую мощность. Так-же, мы получим большие токи, но усилие для поворачивания большого винта может оказаться недостаточным. Можно подать на мотор большее напряжение и все же заставить этот винт крутиться, но возможно, что мотор от этого опять сгорит.
В качестве примера:
Предположим, что у нас есть мотор он винчестера, и мы хотим получить от него необходимую тягу для 72" Piper Cub самолета. Чтобы мотор мог выдерживать большие токи, будем использовать 0.6 мм провод. После непродолжительных мучений, стало понятно, что больше 10-11 витков намотать этим проводом не получается.
Сначала, я соединил его звездой (т.к. я хотел получить больший крутящий момент). На 3х банках LiPo, с нужным мне пропеллером, удалось получить ток всего в 10А. Мощности мотора было явно мало и хотелось получить больше.
Мотор был переконфигурирован под схему Треугольник, что дало больше мощности. Больше тяги для полета, но вместе с этим и достаточно высокие токи, чтобы спалить мотор.
Что же делать в этой ситуации?
Самый верный способ, это подбор батареи с нужным напряжением. Соединение Звездой может спокойно потянуть 4 банки лития и в этой конфигурации выдать требуемую тягу. Для соединения треугольником, наоборот - необходимо уменьшить количество банок батареи.
В результате обе конфигурации выдадут примерно одну и ту-же мощность. (как ни крути)
Обороты и напряжение (об/В)
От того как вы намотаете мотор будет зависеть с какой скоростью он будет крутиться и какую батарею вам придется использовать для получения нужной тяги.
Если взять мотор без винта и дать полный газ на, скажем, 6В, мотор будет крутить на своих максимальных оборотах.
Если измерить эти обороты и поделить их на напряжение батареи, мы получим характеристику называемую Обороты на Вольт (RPM per Volt). После того как мы узнали эту характеристику мы уже сможем сказать, как быстро мотор будет крутить на нужном нам напряжении.
Например, наш мотор крутит 8000 Оборотов на 6В.
8000 / 6 = 1333 Об/в
В этом случае с батареей на 10В мотор будет выдавать 13330 Оборотов.
Эта характеристика помогает нам понять на что способен наш мотор, и подходит ли он для поставленной задачи.
Если нам нужен мотор для импеллера, тогда необходимо чтобы мотор имел более высокие Об/В.
Для 3D самолетов, необходимо вращать больший винт, и поэтому обычно используют моторы с более низким Об/В.
Под нагрузкой количество оборотов естественно упадет.
Возвращаясь назад к схемам Треугольника и Звезды. Имеется зависимость между этими двумя схемами и расчетом характеристики Об/В. Если вы соединили мотор звездой и измерили его обороты, вы можете подсчитать какие Об/В получатся при использовании схемы Треугольник и наоборот.
Для перевода от Звезды к Треугольнику надо домножить Об/В на 1.73
Для перевода от Треугольника к Звезде - домножить на 0.578
Таким образом, у нас появляется реальный инструмент для изменения характеристик мотора в зависимости от простой схемы подключения. Некоторые моделисты, зашли так далеко, что подключают все 6 проводов к небольшому блоку коммутации, что позволяет им менять схему в любое время.
Итак, как определить/рассчитать необходимое количество витков и оборотов/В перед намоткой двигателя?
Существуют специальные программы для расчета количества витков при определенных размерах статора и толщины зубов для получения нужного количества оборотов. Но в большинстве случаев, мы просто наматываем максимально возможное количество витков и измеряем параметры получившегося мотора. Используя полученные данные, уже можно понять устраивает нас такое положение дел или нет, и что делать для достижения цели. Метод “тыка” тоже работает достаточно хорошо.
Выводы:
В качестве инструкции можно привести несколько утверждений:
Чем больше витков намотано на зуб, тем большее магнитное поле будет получено на том-же токе.
Чем сильнее поле, тем больший крутящий момент и меньшее количество оборотов на вольт.
Для получения высоких Об/В, необходимо мотать меньшее количество витков. Но вместе с этим падает и крутящий момент. Для компенсации момента, обычно на мотор подают более высокое напряжение.
Соединение Звездой дает больший крутящий момент и меньшее количество Об/В чем соединение Треугольником.
Последний штрих
Возвращаясь к моей моторке. Мне удалось намотать всего по 11 витков проволокой 0.4мм. С таким колиеством витков о соединении проводов треугольником можно сразу забыть. Итак, я зачистил эмаль с 3х выводов и спаял их вместе.
Оставшиеся 3 вывода были заправлены в термоусадку. Последним шагом я подпаял 2мм коннекторы.


Результаты тестов показали следующие характеристики:
Судя по параметрам - получилось где-то 2200 оборотов, тахометра не было под рукой.
GWS 6х3 тяга 270грамм 6А
GWS 7х3.5 тяга 330 грамм 8.2А
Вполне приемлемый результат.
Автор данной статьи Дмитрий Шохов, за что ему огромное спасибо. Размещена в моём дневнике для личной информации и распостанению не подлежит.
penolet.ru/content/110?page=3
Перемотка мотора 2209 с использованием схемы LRK
Далее я постараюсь описать процесс перемотки еще одного двигателя внезапно потерявшего свою мощность.
Объектом экспериментов на этот раз стал двигатель Turnigy 2209 1050об.в
После его разборки было выявлено, что от вибрации часть проводов обмотки просто оторваласть от выводящих проводов. Припаять их обратно было невозможно, поэтому решил перемотать весь мотор.
Итак, первые шаги - разбор двигателя.
Статор, на удивление, немного поворачивался на основании и я сумел снять его минут за 5.
Надо сказать, что эта операция не всегда проходит так просто, а иногда ее вообще не осуществить.
Один мой знакомый(спасибо Calvin) посоветовал использовать следующий метод:
Надо вкрутить в крепежные отверстия длинные болты и по очереди их закручивать…
За считенные минуты, абсолютно без усилия, можно снять катушку статора.


Получается своего рода съемник. Очень всем советую. проще не бывает.
После этого надо было размотать старый провод. Занятие это, вызвало много затруднений.



Старый провод был настолько плотно уложен и приклеен, что просто раскручиваться он ни в какую не хотел.
В результате пришлось крошить провод кусачками и тянуть по одной жилке плоскогубцами.
После часа мучений статор был размотан.
Далее необходимо было выбрать схему намотки. На том же сайте, где я черпал первую информацию, человек рекомендовал использовать намотку “через зуб”. Называется это LRK.
В чем приемущества такого подхода, попробую объяснить чуть ниже.
LRK
LRK мотор был разработан тремя джентельменами по имени Lucas, Retzback and Kuhfuss. Целью их разработки была попытка получить максимально возможное силовое поле с определенным видом статора и типов манитов. Чем сильнее поле, тем большее крутящий момент можно получить. Количество об.в при этом уменьшается. Это не значит, что LRK моторы не могут выдавать высоких оборотов. Они вполне могут выдавать высокие обороты, которые позволяет выдать ваш контроллер скорости.
Для постройки LRK мотора, нам необходим статор с 12ю зубьями. Нельзя использовать статоры с 9ю зубьями. Следующее важное отличие - это схема намотки. Только половина всех зубов наматывается. Это делает намотку двигателя более простой по 2м причинам. Во-первых, надо мотать меньше зубов. И второе - пропущенные зубья позволяют намотать больше витков на зубья которые мы мотаем. В некоторых случаях это сильно помогает.
Итак, рассмотрим схему намотки двигателя LRK:



Данная схема остаточно проста. Мотаем первый зуб против часовой стрелки, затем переходим к зубу 7 и мотаем в обратном направлении, и так 3 раза. C точки зрения электроники - не важно какие метки стоят на ваших выводах. В данном случае все выводы идентичны друг другу. Поэтому можно смело мотать и не бояться запутаться в будущем.
Для наглядности - намотка фаз:



Далее необходимо соединить выводы. У меня получилось намотать по 18 витков, и я опать буду соединять по схеме звезда. В случае с LRK мотором, схема соединения немного меняется. Для достижения лучшего результата необходимо соединить между собой каждый второй провод. (смотри схему вверху)



Итак, соеиняем провода, паяем их и изолируем в термоусадку. Далее припаиваем выводящие провода к концам обмотки. В результате получается вот такой статор с выводами.
В моем случае я просто вырезал одно из окошек на основании мотора и запрессовал статор обратно.

Вся информация взята из статьи Дмитрия, и огромное спасибо ему за работу penolet.ru/content/110
Механизация крыла
[править] Материал из Википедии — свободной энциклопедии
(Перенаправлено с Закрылок)
Перейти к: навигация, поиск

1 - Винглет.
2 - Элерон.
3 - Высокоскоростной элерон
4 - Балки закрылков.
5 - Предкрылкок Крюгера (англ.).
6 - Предкрылки.
7 - Закрылок.
8 - Закрылок.
9 - Интерцептор.
10 - Спойлер.

Выпущенные закрылки и предкрылки.

Выпущенная механизация Ил-96-300

Выпущенные предкрылки.
Механиза́ция крыла́ — совокупность устройств на крыле летательного аппарата, предназначенных для регулирования его несущих свойств. Механизация включает в себя закрылки, предкрылки, интерцепторы, спойлеры, флапероны, активные системы управления пограничным слоем и т. д.
Содержание
[убрать]
-
<LI class=“toclevel-1 tocsection-1”>1 Закрылки <LI class=“toclevel-1 tocsection-2”>2 Флапероны <LI class=“toclevel-1 tocsection-3”>3 Предкрылки <LI class=“toclevel-1 tocsection-4”>4 Интерцепторы
- <LI class=“toclevel-2 tocsection-5”>4.1 Элерон-интерцепторы
- 4.2 Спойлеры
<LI class=“toclevel-1 tocsection-7”>5 См. также
[править] Закрылки
Закрылки — отклоняемые поверхности, симметрично расположенные на задней кромке крыла. Закрылки в убранном состоянии являются продолжением поверхности крыла, тогда как в выпущенном состоянии могут отходить от него с образованием щелей. Используются для улучшения несущей способности крыла во время взлёта, набора высоты, снижения и посадки, а также при полётe на малых скоростях.
Принцип работы закрылков заключается в том, что при их выпуске увеличивается кривизна профиля и (в случае выдвижных закрылков[1], которые также называют закрылками Фаулера[2]) площадь поверхности крыла, следовательно, увеличивается и подъёмная сила. Кроме того, выпуск закрылков способствует увеличению аэродинамического сопротивления. При выпуске закрылков обычно возникает необходимость перебалансировки самолёта из-за возникновения дополнительного продольного момента, что усложняет управление самолётом (на многих современных самолётах пикирующий момент при выпуске закрылков компенсируется перестановкой стабилизатора на некоторый отрицательный угол). Закрылки, образующие при выпуске профилированные щели, называют щелевыми. Закрылки могут состоять из нескольких секций, образуя несколько щелей (как правило, от одной до трех). К примеру, на отечественном Ту-154М применяются двухщелевые закрылки, а на Ту-154Б — трёхщелевые. Щели способствуют перетеканию воздушного потока с нижней поверхности на верхнюю, одновременно разгоняя его. Это помогает затянуть срыв потока с закрылков и, таким образом, увеличить возможный угол их отклонения и допустимый угол атаки.
[править] Флапероны
Флапероны, или «зависающие элероны» — элероны, которые могут выполнять также функцию закрылков при их синфазном отклонении вниз. Широко применяются в сверхлёгких самолётах[3] и радиоуправляемых авиамоделях при полётах на малых скоростях, а также на взлёте и посадке. Иногда применяется на более тяжелых самолётах (например, Су-27). Основное достоинство флаперонов — это простота реализации на базе уже имеющихся элеронов и сервоприводов.
[править] Предкрылки
Предкрылки — отклоняемые поверхности установленные на передней кромке крыла. При отклонении образуют щель, аналогичную таковой у щелевых закрылков. Предкрылки, не образующие щели, называются отклоняемыми носками. Как правило, предкрылки автоматически отклоняются одновременно с закрылками, но могут и управляться независимо.
В целом, эффект предкрылков заключается в увеличении допустимого угла атаки, то есть срыв потока с верхней поверхности крыла происходит при бо́льшем угле атаки.
Помимо простых, существуют так называемые адаптивные предкрылки. Адаптивные предкрылки автоматически отклоняются для обеспечения оптимальных аэродинамических характеристик крыла в течение всего полета. Также обеспечивается управляемость по крену при больших углах атаки с помощью асинхронного управления адаптивными предкрылками.
[править] Интерцепторы
Интерцепторы (спойлеры) — отклоняемые или выпускаемые в поток поверхности на верхней и(или) нижней поверхности крыла, которые увеличивают аэродинамическое сопротивление и уменьшают(увеличивают) подъёмную силу. Поэтому интерцепторы также называют органами непосредственного управления подъёмной силой. Не следует путать интерцепторы с воздушными тормозами.
В зависимости от площади поверхности консоли, расположения её на крыле и т. д. интерцепторы делят на:
[править] Элерон-интерцепторы
Элерон-интерцепторы представляют собой дополнение к элеронам и используются в основном для управления по крену. Они отклоняются несимметрично. Например, на Ту-154 при отклонении левого элерона вверх на угол до 20°, элерон-интерцептор на этой же консоли автоматически отклоняется вверх на угол до 45°. В результате подъёмная сила на левой консоли крыла уменьшается, и самолёт кренится влево.
У некоторых самолетов, элерон-интерцепторы могут являться главным органом управления по крену.[4]
[править] Спойлеры

Выпущенные спойлеры
Спойлеры (интерцепторы) — гасители подъемной силы.
Симметричное задействование интерцепторов на обеих консолях крыла приводит к резкому уменьшению подъемной силы и торможению самолёта. После выпуска самолёт балансируется на большем угле атаки, начинает тормозиться за счет возросшего сопротивления и плавно снижаться. Возможно изменение вертикальной скорости без изменения угла тангажа. То есть при одновременном выпуске интерцепторы используются в качестве воздушных тормозов.
Интерцепторы также активно используются для гашения подъемной силы после приземления или при прерванном взлёте и для увеличения сопротивления. Необходимо отметить, что они не столько гасят скорость непосредственно, сколько снижают подъёмную силу крыла, что приводит к увеличению нагрузки на колеса и улучшению сцепления колёс с поверхностью. Благодаря этому, после выпуска внутренних интерцепторов можно переходить к торможению с помощью колёс.
Долго мучился с отсутствием в передатчике выключения двигателя в самолётных настройках, для переноса модели и регулировок в поле например. Кстати пару раз чуть со стола не улетел. И на форуме ни поиск не дал ни чего, ни неделю никто ничего толкового не сказал, кроме одного человека посоветовавшего задвоить Миксы т.к. газ считает 200% для выключения, так и попробовал сделать.
А всего лишь надо одновременно выставить эти настройки в MIX 1 и MIX 2, SW по желанию на любой переключатель, и положение тумблера так же.
Ну и соответственно включить в Миксах параметры.
MAS - OFS
SLV - CH3
RT - 100%
SW - G ^
Ну вот и всё, и теперь как человек можно передвигатся по полю не боясь случайных сдвигов стика на передатчике который болтается на ремне.
Подобно другим гироскопам, когда включится питание, LED быстро замигает, указывая, что инициализация находится в прогрессе. Не касайтесь гироскопа или вертолета в этот момент. Как только процесс инициализации завершается, LED статус будет зеленый или красный. Зеленый указывает, что гироскоп находится в режиме AVCS Angular Velocity Control System - режим удержания хвоста, красный цвет означает, что гироскоп находится в нормальном режиме.
• 1520/760: Это представляет скорость используемого сервопривода руля направления (RUDDER). Обычно используемые аналоговые или цифровые сервомоторы, используют 1520us частоту. 760us частота изменения используется для высокоскоростных сервомо-торов, как например Futaba 9256 и BLS251. Если вы не уверены, всегда устанавливайте 1520us, чтобы избежать сожжения вашего сервомотора. 1520us - также заводские установ-ки по умолчанию.
• DS/AS: установка гироскопа для одного из двух типов сервомашинок Цифровых или Аналоговых. Заводская установка по умолчанию – DS.
• NOR/REV: эта установка компенсирует направление работы гироскопа.
• LIMIT: Это пределы (лимиты) установки передвижения сервопривода rudder (руля на-правления) и используются, чтобы избежать выхода из строя сервопривода и хвостовой тяги.
Delay (Задержка): Эта установка используется для гашения колебаний (демфирования) гироскопа, компенсируя скорость для более медленных сервомоторов, которые не в со-стоянии удержать хвостовую балку, что приводит к хвостовому колебанию. Есть также встроенная регулировка, зависящая от размера вертолета. Маленкая задержка для 250/450 размера, большая задержка для 500/600/700.
• Для входа в режим настроек необходимо нажать и удерживать в течение 2-х секунд кнопку SET пока STATUS LED не начнет мигать.
• Находясь в режиме настроек, мгновенное нажатие кнопки SET будет циклично перехо-дить к последующим настройкам.
• Выберите установки, перемещая ручку rudder влево или вправо, и наблюдайте за изме-нением цвета STATUS LED.
• Когда индикатор будет светиться нужным цветом, нажмите кнопку SET, чтобы запом-нить установки.
• Гироскоп выйдет из режима настроек, если в течение 10 секунд не будут совершены ни-какие действия.
Ниже пример настройки. Предполагается, что вы будете использовать этот гироскоп на T-Rex 250 с сервомотором Align’s DS420.
- Нажмите и держите кнопку SET до тех пор пока STATUS LED не начнет мигать.
- 1520/760 LED будет светиться
- Передвиньте ручку rudder влево или вправо и посмотрите на STATUS LED. Зеленый LED соответствует 1520us, красный LED соответствует 760us. Вы должны установить его в 1520us.
- Во время удержания ручки rudder и LED светится зеленым цветом, нажмите кнопку SET на гироскопе.
- DS/AS LED активно.
- Передвиньте ручку rudder влево или вправо и посмотрите на STATUS LED. Зеленый digital servo (DS), красный для analog servo (AS). установите DS.
- Во время удержания ручки rudder и LED светится зеленым цветом, нажмите кнопку SET на гироскопе.
- NOR/REV LED активно.
- Передвиньте ручку rudder влево или вправо и посмотрите на STATUS LED. Зеленый для нормального, Красный когда направление по необходимости может быть реверсиро-вано. Установите нормальное направлениеl.
- Во время удержания ручки rudder и LED светится зеленым цветом, нажмите кнопку SET на гироскопе
- Limit LED активно.
- Перемещайте ручку rudder и наблюдайте за перемещение хвостовой тяги. Передвигай-те ручку rudder влево до тех пор пока хвостовая тяга дойдет до конца.
- Удерживая ручку rudder в конечной точке, нажмите кнопку SET.
- Закончите настройки (выйдите из SETUP). Войдите в настройки повторно, дойдите до меню Limit, затем перемещайте ручку вправо до тех пор пока хвостовая тяга не дойдет до другого конца.
- Удерживая ручку rudder в конечной точке, нажмите кнопку SET.
Лимит перемещения на этом гироскопе может быть настроен для каждой стороны отдельно. - Delay LED активно.
- Передвиньте ручку rudder влево или вправо и посмотрите на STATUS LED. Green LED для большого вертолета, красный LED для маленького вертолета. Сделайте уста-новки для маленького вертолета.
- Положение ручки rudder, перемещенной от центра, определит, величину примененных задержек. Для этого примера, сервоприводу Align DS420 не нужна никакая задержка, по-этому ручка rudder может быть оставлена в центре. Вы двигаете ручку rudder влево или вправо для изменения цвета индикатора (Зеленый или Красный), а затем если вы хотите установит задержку в 0 переведите ручку в центр до нажатия кнопки SET.
- Удерживая ручку rudder и LED светится зеленым, нажмите кнопку SET.