Activity
они почему то по умолчанию - выключены и само приложение их не просит.
Столкнулся с этим на одном из смартфонов от Samsung, запрос есть, но вылезает на долю секунды, моргает и тут же исчезает, а приложение дальше работает.
есть небольшая проблема что фото почему-то сохраняются в формате pgn но это тоже решаемо
Это очень странно, вроде бы всегда в JPG, они и с самого дрона идут как jpeg-и.
Это которая работает с X5/X5R и снимает в DLog/ProRES/RAW ? )))
Это которая, как указано в комментарии osmo plus. То о чем говорите вы у DJI называется Osmo Pro и Osmo RAW. Сама “палка” Osmo Handle. Просто для справки.
По этому видео у GoPro цвета явно лучше
Как уже сказали цвета и подкрутить можно, хотя для хипстер камеры это геморой. А вот динамический диапазон показался просто ужасным, даже в сравнении со старой Osmo. Или что-то не так с настройками у обзорщиков:
Osmo pocket
Osmo Plus
Софт скорее всего готов давно, просто пока не открыт для всех.
Без 1" не серьезно. Подождем, 28 уже близко
Дважды (на фото и в видео ролике) бассейн/воду показывали. Водонепроницаемая osmo pocket? Или хитрый колпак будет одеваться?
UPD: twitter.com/OsitaLV/status/1065146535946534913 - видимо как то так =)
Вы зачем то упорно пихаете свой “профессионализм” когда речь идет про DJI osmo в плане потребительской электроники.
Судя по тому что подвес (ronin) под ПРО камеры обновляют и расширяют аксессуарами там всё хорошо и так и DJI знает что делает помноженное на отсутствие конкурентов. И аналогично всё довольно плохо с DJI Osmo pro иначе бы линейка не остановилась в развитии.
Это на замену DJI Osmo с x3, там профессионализмом и не пахло. Профессионалы купят 1…2 раза. Обычные смертные, коим всеравно сколько дюймов в дюме, такие штуки под рождество/новый год накупят не мало.
Лично я побегу брать =) отличное наземное дополнение к не профессиональному, но удобному mavic air.
DJI Osmo устарела, DJI Osmo pro слишком дорого, снимать видосики с панасоником г7 тоже стало не очень удобно, да и плавности хочется. А тут прям радость. Да, не фуллфрейм на палке с подвесом и сменной оптикой, но может быть оно и не надо чтобы просто поснимать семью для семейного же видео архива?
примерно 22 миллиметра, а никак не рекламные 34
Это в какой такой рекламе производитель заявлял про 34мм? Почти Full Frame под видом micro 4/3?
Да, после “TELLO_CMD_TAKEOFF” в логе почти сразу идет “FAILSAFE!!!”.
Странно, если видео есть, то и в обратку из браузера должы пинги идти. Посмотрю на досуге, может что-то сломалось для ffmpeg с переходом на mplayer.
4178 это код команды какой то, не обращайте внимания. Если сразу садиться, значит нет связи с браузером, в логе скорее всего будет написано FAILSAFE.
Какая операционная система, браузер, версия node.js, mplayer?
Задержка зависит также от устройства, и еще других факторов. Как уже говорил, на iphone задержка практически не чувствуется, и можно комфортно летать от первого лица неподалеку.
Провел сегодня натурный эксперимент. Слева подключение к дрону ноутбуком с python скриптом - задержка 0.19сек. Справа Iphone SE - задержка 0.11сек.
Простестировал ещё раз у себя, задержка выходит примерно 0.16 секунд (прыгает от 0.13 до 0.20), вместо прошлых ~0.25. Не могу сказать с чем связано, но первый тест был без обновления прошивки и вроде бы с тех пор уже 2 обновления было.
Полетал в своей проге с пультом (обновил nodetello, чтобы использовать mplayer, а не видео в браузере после конвертации ffmpeg-ом), задержка не ощущается, очень круто!
последний DJI Assistant установлен?
В папке с симулятором /Program Files (x86)/DJI Flight Simulator/dji_usb_5512_64_108.exe дрова лежат. Устаналиваем, подключаем пульт, включаем пульт, вуаля
Интересно. Проверял несколькими девайсами, задержка всегда была не меньше стандартных для dji 0.25 секунд. Надо ещё раз перепроверить =)
- Droneblocks выглядит простовато, вкорячивать OpenCV через Go/Python уже тяжеловато, но смотря какой возраст детей.
- Датчиков “препятствий” там никаких нет, но дрон сыпит много информации о себе, к примеру координаты от точки старта (X, Y, Z), данные с IMU, углы наклона, ну и видео с камеры передней
- Оптичиеский датчик снизу исключительно для определения положения, к нему никак обратиться нельзя и уже тем более искать с ним объекты
Задержка видео около 0.25 секунд, чуть чуть больше чем у большинства (не ocusync) DJI дронов. Картинка сильно зависит от телефона, на моем xiaomi redmi note 3 pro жуть, на планшете от cube очень даже не плохо летает, фризы крайне редкие. Така же фигня была с DJI Spark в своё время.
По поводу программмирования - смотря что надо. Позицию относительно точки старта знает не плохо, но крайне быстро накапливает ошибку, особенно если под коптером нет хорошей контрастной и освещенной поверхности. Библиотеки для дрона уже есть как минимум на Go, Python, C#, Node.JS (никак до ума не доведу, времени нет).
я не уверен наскока это стабильно и какая ошибка будет за 10 минут полетов по ветру, но тем не менее
Спасибо за видео, более наглядная работа визуального позиционирования.
Ошибка обязана быть и будет заметно накапливаться, так как нет возможности её корректировать (как в случае с GPS), да и очень многое будет зависеть от освещения и поверности под дроном.
Наковыряйте совместимость с любым пультом и режим VR лучше))))
aTello же, давно тут давал ссылку: tellopilots.com/…/atello-android-development-threa…
Я ковыряю для себя интереса ради и чтобы работало в браузере на компе, под мобилки не собираюсь писать.
Какое положение он знает?
Своё положение относительно точки старта. Я просто сейчас ковыряю дрон, данные с него и всё больше и больше удивляюсь как за 99 баксов напихали столько полезного… Но не пихнули нормальную писалку видео =)
RTH без GPS? Сомнительно как то…
Дрон знает своё положение от точки старта. И по мере полета/перемещения довольно точно отдает координаты по X Y Z.
Mavic 2 enterprise вроде уже обсуждали, интерсные наболдажники сверху цеплять можно будет.
В догонку уж, mavic 2 pro с 1" сенсором и вся камера от хаселей (квадратная бандурина), mavic 2 zoom вроде бы 1/1.7 сенсор, но оптика 24-48мм (2х кратный зум) и долли зум эффект, чтоб как у anafi. Сенсоры по кругу, летает 27-31 минуту.
Пока нет подтвеждений/опровержений что камеры будут легко заменяться и вообще будет osmo с этими камерами, но очень бы хотелось =)
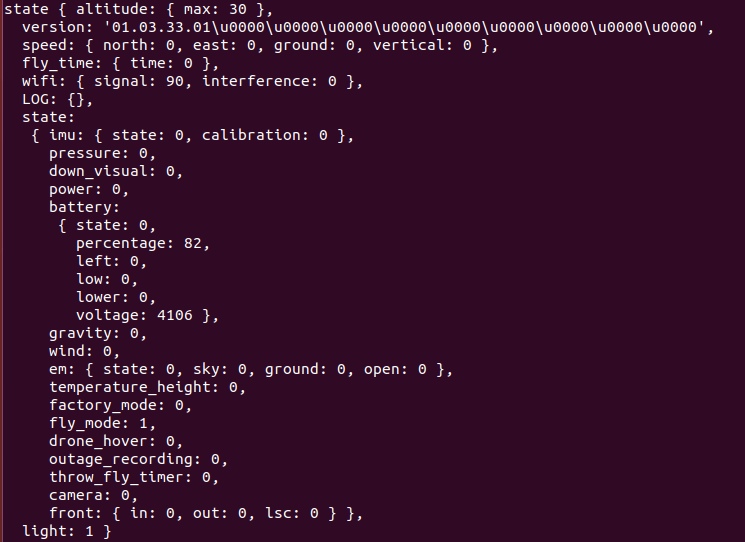
Однако много интересного можно выловить с дрона, к примеру данные с датчиков из лога (гира, аксель, барометр, дальномер, позиция по камере снизу, вычислить углы наклона) и состояние дрона (вайфай, батарейка, полетный режим, скорость)

Начали появляться недоконкуренты для осмы, видимо решили одним махом: и новый дрон, и новые камеры для новой осмы. Вполне хорошее решение, эдакое преимущество, как было у кармы.
Ещё один Mavic… Enterprise. www.kanzhaji.com/platforms/dji-mavic2/45383.html
Не знаю что тут у вас с картинками, смотрите ео ссылке.
Раз в прошлый раз не запомидорили, то продолжаю.
Немного потюнил параметры ffmpeg, теперь видео в браузере с дрона идет с задержкой 0.5 секунд (оригинальное приложение дает около 0.25 секунд, все DJI дроны без ocusync дают задержку около 0.22 секунд). Считаю в целом юзабельно =) Дальнейший тюниг параметров ffmpeg не дает никаких улучшений, подозреваю что теперь уже дело в чем то другом, так как посредников между дроном и окном браузер очень много: дрон -> wifi -> node.js -> ffmpeg -> node.js -> websocket -> браузер -> h264 декодер написанный на JavaScript -> canvas
Не уверен что интересно, если нет, кидайте помидорку, не буду писать больше =)
По вечерам пилю проект для дрона нашего на node.js (на других языках уже есть, а то и не одна либа, а мне node.js нравится), код выложил на github.com/SovGVD/nodetello
На данный момент проект состоит из 2х частей, библиотека для node.js (частичный порт pytello) + web клиент (пока что выводит видео поток в браузер в canvas с заметной задержкой). Пока кроме получение/конвертации/отправки видео потока, версии прошивки, максимальной высоты и отправки позиций стиков (по центру, чтоб ничего не делал) ничего не умеет делать.
В ближайшее время попробую полностью портануть pytello (получать все параметры и отправлять команды управления), после чего можно уже баловаться с opencv и tensorflow, хотя при такой задержке боюсь что ничего хорошего не выйдет, либо учитывать лаг. На Марсе же нормально роверы катаются, а там лаг заметно больше =)
и возможно передний ИК датчик как у спарка
В чем смысл переднего ИК датчика, если уже давно стереопара стоит и карту глубины строит хорошо. На спарке оно было просто для удешевления, так как одно дело ставить 2 камеры + проц под обработку (хотя там шустрая хардверная штука уже), а другое дело проецировать маску точек и получать быстро карту глубин обратно, как на MS Kinect было.
Слухов слишком много и все противоречивые.
DJI уже ответил на вопрос об этих картинках, что они никакого отношения к Пятому фантому не имеют, а это обычный Фантом 4Про, но сделанный под заказ.
Ну если смогли для одного сделать, народ пошуршал что в целом здорово и интересно, то почему бы не запилить всем желающим за N денег.
Я как то после Mavic Air не жду ничего, имхо почти идеальная штука (хотя ведь 100% сделают так что захочется новое), я больше жду когда Osmo сделают новую, 1" сенсор на стабе имхо разойдется похлеще чем всякие экшн/блого камеры (аля sony rx100) расходятся, а если со сменными объевтивами… Хотя в большинстве случаев баловство.
Глеб жду результатов.Спасибо за работу!!!
Пока на паузе, переезжаем, зато как переедем будет где разгуляться и потестировать с полетом. Но внезапно на работе проект частично будет замешан на трекинге и js, так что может быть сразу 2х зайцев =)
Так же, для интересующихся програмированием, для телло есть бибилиотеки на python (2 штуки), go, java/c/android. И я сейчас допиливаю на node.js с веб сервером (чтоб в браузере всё отображать) и биндингом opencv + tensorflow, в планах сразу же запилить follow режим на манер современных dji дронов (тыкание по объекту с паспознаванием через tensorflow и трекинг уже через opencv).
что то не очень получается, хотя видосиков пересмотрел много
У меня постоянно писал что не получилось, пробовал много раз, а потом оказалось что всё работает (tello-xxx_plus сетка появляется), похоже на какой то косяк с самой прогой.
А никто не задавался вопросом подойдёт ли на телло пульт от спарка. Или наоборот будет ли т1д рулить спарком?
С чего вдруг? Пульт от спарка хоть и использует WiFi-подобное соединение, но всё же не простой WiFi, а всякие игровые пульты - провода и bluetooth.
Я думаю спор в целом бестолковый, мы всеравно не узнаем как на самом деле и при каком окружении работают различные датчики и как они комбинируются в прошивке с учетом CPU, который специально там для обработки видео потока.
По поводу затыркивания ИК датчиков, картонки точно ИК диапазон не пропускали?
UPD: сам экспериментить не хочу… но узнать чего и как там конечно интересно =)))
тогда остаётся калибровка IMU, ждём результатов.
Забежный выходной вышел, только вечером до коптера добрался и откалибровал. Проблема исчезла! Больше вверх не тянет, висит почти как прибитый (темно, ругается что VPS не видит ничего, просит посадить ну и соответственно позицию держать тяжело ему). Ребенок уже лего налепил на него, радуется =)
Заказал ещё пару акков и наверное сумку надо небольшую дешевую, таскать просто так - поломается, а в коробке как то не круто =)
со смарта или геймпада?
Со смарта, так что дрейф из-за стиков исключен.
Дрейфует и упирается в потолок 3-4 метра. Поверхность - серое ковровое покрытие, не сильно контрастный паттерн конечно, но всё же не зеркало и не совсем однородный.
но камера отвечает только за смещение по двум осям
Понятно что расстояние без стереопары не понять нормально, но смещение по Z всёже можно найти (можно например погуглить про monocular slam). Но не суть,мы всеравно не знаем как там проц и что обрабатывает на самом деле, одни догадки.
А Вы попробовали откалибровать IMU, что нибудь изменилось в поведении квадрика?
Пока что времени не было, на выходных обязательно откалибрую. Носил на работу, где в офисе потеплее чем дома (зима в другом полушарии), квардик заметно медленнее по высоте дрейфует, а иногда и совсем хорошо висел + в офисе ярче и не было предупреждений что VPS ничего не видит. Завтра откалибрую и попробую уже дома когда светло. Или даже на улице.
В современных дронах должна быть совокупность датчиков баро+аксель+дальномер. Не удивлюсь если и оптический сенсор тоже понимает когда отдаляются/приближаются. Воспрос задал потому что коптер стабильнл вверх тянет и может быть это какая то общая проблема или хотя бы часто встречается.
Пришла эта радость для меня детей. Всё отлично, но дрон постоянно тянет вверх, каждый раз приходится немного дергать виртуальный стик вниз, чтобы не упёрся в потолок. Это как то лечится?
github.com/Kragrathea/TelloLib/tree/…/Released
Альтернативный клиент под android
Да но автор пишет,что с родным пультом GameSir T1d приложение не работает!!Я уже заказал такой.
Главное что есть возможность писать приложения, а связь пульт<->девайс дело наживное =) Я уже в нетерпении когда же мой придет (ибо местный магаз цену умножил почти на 2) и в раздумиях по поводу закупки батареек (а вот батарейки почему то дешевле), одной явно маловато.