Activity
Много времени прошло с момента когда спрашивал про детали гексапода, уже успел даже продать его. Собрать большую робособаку и решив что на ней тестировать не удобно, собрал мелкого четвероногого друга =) www.thingiverse.com/thing:4822059
Робот честно ходит: обратная кинематика, просчет положения в будущем, перемещение, алгоритм движения ног и т.д., но пока все расчеты в одной плоскости и без учета IMU. Управление через браузер на смартфоне, максимально удобно и просто.
Положения конечностей и самого робота просчитываются в абсолютных координатах, что с одной стороны опасно - легко попасть на переполнение значений, да и память жрёт, а с другой стороны каждую конечность можно перемещать с привязкой к каким то данным извне да и и возможно выйдет одометрию как то прикрутить.
Собственно собран робот на сервах TowerPro mg90d (не уверен что оригинал у меня), в качестве контроллера ESP32, питание от 2х элементов 18650 и три mini360 для питания серв (греются, но вроде не критично) и мозгов. Детали напечатаны китайским PLA на Ender 3 pro. В целом проект стараюсь делать максимально бюджетно, открыто, свободно, модно, молодежно.
Исходный код: github.com/SovGVD/esp32-robot-dog-code
Исходники для печати (FreeCAD): github.com/SovGVD/esp32-small-robot-dog-hardware
Больше фото робота и процесса в инстаграме (но вперемешку с семейными фото): www.instagram.com/sovgvd/
После некоторых раздумий и совета от misha hrunevich из прошлого поста, сваял плату на 18 микробеков, каждый должен выдавать 6В и до 3А (в теории и больше).

А так же соорудил неведомый сендвич из плат, чтобы в итоге уместить всё (изначально предполагал что только мозги или даже их часть будет внутри) в корпус

Больше фоток процесса
Сендвич немного греется, но не критично + для мозгов (одноплатник на Allwinner H3) всеравно будет активное охлаждение, которое заодно будет продувать и БЕКи.

Больше фото
В качестве контроллера серв - Arduino Mega с самописной, не сильно сложной, прошивкой. Почему не готовые? Ну мне показалось что там есть фатальный недостаток и пихать цифры буквами с разделителем, когда можно пихать цифры в бинарном виде, не есть хорошо.
Первый робкие шаги www.instagram.com/p/B0saI2ajVMm/
После нескольких исправлений кода и выставления центра серв (сервы за 1.99 та ещё “радость” оказались) www.instagram.com/p/B1kWh6vj5tK/
Как вы наверное заметили паучек всё ещё прицеплен к компу и потраха не внутри корпуса, на то есть причины:
- надо думать как заряжать аккумы не разбирая каждый раз корпус
- плата с мозгами ещё не закончена, не хватает LLC на UART и датчики тока всё ещё в пути, а так же надо оставить место под периферию в виде IMU, камер, датчиков на ногах и т.д.
- до сих пор не придумал как красиво подвесить это добро внутри корпуса, пока на ум ничего не пришло, кроме как сделать ушки из проволоки и прикрутить на стойках
Как обычно времени на всё не хватает, но вроде бы с механикой закончил, хотя и есть жгучее желание заменить хотя бы часть серв на что-то более точное и приличное. В планах дописать код до вменяемого стабильного состояния в 2Д, так как сейчас робот немного заваливается при резкой смене направления, не пересматривая текущее положение ног и игнорируя любые лимиты, центр масс и гравитацию. А в далеко идущих планах прикрутить ToF сенсор в качестве лидара, IMU и использовать их для обхода препятствий и ползания в 3Д, например забираться по леснице, что как у Boston Dynamics =)
Здравствуйте форумчане.
Скучно с коптерами (да и не собирал давно и времени нет и после Mavic Air как будто и не надо ничего), решил строить гексапод, hexapod, он же робот паук. Заказал раму, сервы. Всё пришло. Начал думать о питании и то ли не так считаю, то ли всё очень заморочено, то ли столько не надо в принципе.

Дано, 3 степени свободы на 6 ногах, т.е. 3*6=18 серв. Сервы MG996R (ну или нечто подобное). Гугление говорит что серва такая хочет при 6В 2.5А (не многовато?). Соотвестсвенно источник питания должен выдавать 6В и 2.5*18=45А чтобы обеспечить нормальную и стабильную работу (понятно что там все сервы разом не под 100% нагрузкой, но всё же). С прошлого проекта у меня осталить 3 элемента 18650 (2500 mAh, 20A) и валяются два 3.2В…40В -> 1.25В…35В DC-DC (UBEC?) на 3А каждый на LM2596 (даташит говорит что там и до 7А можно дотянут
ь).
Сижу и думаю:
- надо ли действительно 45А?
- если надо, то стоит ли докупить ещё один 18560 и сделать 2S2P?
- и где бы найти BEC на 6В и 45А?
- LiPo вместо 18560? (а смысл?)
В колледже хотели сделать прикольную штуку - ходящий по аудиториям робот (с трансляцией видосов, управлением по сетке и прочее), но к сожалению проводки у него от старости обсыпались и остались без изоляции, от чего его чутка коротнуло и проект решили свернуть (до конца обучения на этом курсе 2 недели, надо срочно чето новое делать, а не перепаивать все внутренности). А код то остался, может кому пригодится, у кого есть ардуинка, ИК светодиод и такой вот робот.

Ссылка на код github.com/SovGVD/robosapien_v2
В Arduino терминале набираем help - будет список команд (мало что протестировать успел), набираем например LA.up - и робот чутка поднимет левую руку вверх. ИК приемники у него в “ушах”.
Выдранное из диалога о видеомонтаже и косяках видео, а так же о плавности картинки
- частота кадров проекта не совпадает с частотой кадров видео ролика, 30fps не 29.97 (30000/1001), сони вегасом давно не пользовался, но несколько лет назад он с этим справлялся крайне убого, то дублируя, то сливая вместе, то выкидывая кадры. Судя по многим отзывам премьер с этим справляется нормально.
- снимать 25/30fps (25000/1001 или 30000/1001 на самом деле, проги не всегда адекватно реагируют на это) с ND фильтром, чтобы получались более-менее киношные смазы, которые и делают плавность (остановите любой фильм на динамическом моменте - там одна размазня), плюсом к этим смазам будет то, что битрейт будет ниже (данных уникальных меньше), а при том же битрейте качество лучше (данных меньше опять же)
- снимать 60/120 fps, не думая о мыльности и надеятся что на компе “клиента” и youtube правильно пережмет
- карта памяти тупит, не успевая писать поток, но тут бы вылезло еще много-много проблем
по поводу киношных смазов, немного математики и грубого объяснения (может есть лучше примеры?):
допустим коптер летит со скоростью 10 м/с, яркое солнце, выдержка у нас 1/3200, а то и короче (не смотрел если честно), т.е. за 1 секунду коптер как бы мог бы “сделать” 3200 кадров, запечатлив 10 метров в 3200 кадров, т.е. по 3 мм на кадр, из которых в видео поток попадает только 30, из-за чего видео превращается в набор фоток из 3мм сдвигов, затем пропадает сдвиг на 0.33метра, затем снова 3мм сдвиг. Слайдшоу, рывки и проче ужасы, при поворотах смещение будет еще больше, а эффект стробоскопа/слайдшоу/рывки еще более заметными
Т.е. другими словами, надо:
- или много кадров, от которых не будет толку, если человек не смотрит с теми же fps
- или увеличивать выдержку (вечернее время и/или ND фильтр)
- или летать очень очень плавно и еще медленнее разворачиваться
Идея с таблицей видимо провалилась, сделал видео тесты своих гаджетов, пока они еще на руках rcopen.com/forum/f132/topic431690/835
Черновик! От темы rcopen.com/forum/f132/topic431690/753
Предлагаю поля таблицы:
0. коптер
- название устройства (год выпуска или серийник, чтобы точно понимать о чем речь)
- экрана
2.1 размер и разрешение
2.2 фото на солнце (крайне субъективно будет, но что поделаешь), по возможности параметры экрана (яркость/контраст) и описание сделанных улучшений, если имеются - наличие GPS/3G (навигация, “свой” интернет)
- DJI GO (указать версию)
4.1 объективная задержка видео (скриншот/видео с таймером) в фото и видео режиме
4.2 субъективная задержка видео (нормально/летабельно/слайдшоу/жуть как тормозит/нет картинки) в фото и видео режиме - Litchi (те же поля + указать версию)
5.3 работа оптического трекинга для 3 версии фантомов и первых испаеров - Другой софт аналогично с указанием версии
- баллы в Antutu (с указанием версии программы и полным списком попугаев по 3D, CPU, RAM, UX)
- примерно число вылетов/длительность/времягода или погодные условия
- примечания по устройству (например: при перегреве выключается)
- вердикт (годнота, нормально, фуфло)
по поводу цены, наверное стоит разбить на категории, а не указывать цену (тем более в рублях), например дешево (до 100$), средне (100…200$), дорого (больше 200$)
Пример
0. DJI Phantom 3 Advanced
- Xiaomi Redmi Note 3 Pro (на процессоре Snapdragon)
- 5.5" 1920х1080, фото на солнце раз, два, яркость на максимум
- GPS (не тестировалось в режиме Follow me) и сотовая связь (2/3/4G)
4. DJI GO
4.1 - не проверял
4.2 - очень шутро, без лагов и задержек заметных
5. Litchi 3.6.x
5.1 - не проверял
5.2 - всё отлично
5.3 - пробовал 1 раз в течении 20 минут, работает почти идеально, еле-еле заметные притормаживания - не проверялось
- от 59735 до 76571
- два вылета, по 15…20 минут, проблем не замечено
- при сильном нагреве на солнце не выключается, от производителя матовая пленка на экране
- супер!
Цена: средне, 150…200$ в зависимости от модели (2/3GB RAM, 16/32GB ROM)
Полетал сегодня, наконец то! Исправил все косяки, осталось навести марафет и кое-какие красивости навесить, чтобы проводов не было особо видно, да и коптер подрезать, длинноватый. Летает 19 минут до пищалке, наверняка еще можно пролететь пару минут, но уже опасно =)
А я вот о чем…
По следам записи rcopen.com/blogs/199437/21271
Чето надоедает потихонку собирать и бегать настраивать (тем более когда двое детей и море работы), оно конечно весело и познавательно, да и летает последнее время очень даже не плохо. Но хочется… если не инспаера, то третий фантом (про естественно).
Решил прикинуть сколько стоят нынешние аппараты в стоимости деталей (конечно в итоге больше влито, что-то выкинул, что-то докупал, мелкие штуки, вроде шасси, UBEC-ов, проводочков, креплений, болтиков/винтиков и прочего).
Новые коптеры сделаны на одинаковых рамах - Y6 и трикоптер, на обоих стоят пиксы с GPS/Глонасс модулями от Алексея Козина. И на брюхе сделаны “кружочки”, для цепляния блока подвес+шасси+батарейка.
Жуть… суммарно вышло почти 1900 с запаской, наверное если посчитать всё что вложено, и за 2000 легко перевалит, конечно не рублей 😃
Сижу и думаю: реально ли всё это продать в уловиях кризиса, так как купленное в долларах давно, в рублях чето совсем страшно выглядит сейчас, нефть дешевеет, а тут еще с Ирана сегодня сняли санкции, страшно смотреть на USD/RUB завтра будет =)
наименование кол-во цена за единицу итого
Y6 гекса - 420$

рама (частично карбон) 1 72 72
Моторы 7 18 126
Пропеллеры (по 4 пары) 1 34,99 34,99
ESC 6 9,26 55,56
GPS/ГЛОНАСС 1 63 63
pixlite + power 1 68 68
телеметрия 1 32 32
трикоптер - 410$

рама (частично карбон) 1 72 72
Моторы 4 18 72
Пропеллеры 1 34,99 34,99
ESC 4 9,26 37,04
GPS/ГЛОНАСС 1 60 60
fixhawk (rctimer pix) 1 135 135
серва 1 25 25
блок камера+подвес+батарейка+fpv - 230$

storm32 1 22 22
гимбал с переделкой (+мотор) 1 65 65
video tx 1 25 25
video antenna 1 10 10
Xiaomi Yi + объектив + карта 1 110 110
Батарейки для этого
batteries multistar 2 34 68
batteries zippy 2 50 100
Мелкие коптеры
трикоптер на раме трифекта (переделываю под flip32) - 220$

трифекта 1 29 29
miniapm 1 38 38
esc 4 10 40
моторы 4 14,99 59,96
fpv + ant 1 30 30
gps 1 25 25
До сих пор не собранный квадрик на zmr250 - 150$
zmr250 1 26 26
flip32 1 24 24
моторы 4 6,75 27
fpv + ant 1 30 30
esc 4 11 44
оставшиеся в живых батарейки
battery zippy 1 13 13
battery tyrnogy 1 10 10
пульт с экраном - 200$ (помойму экран в прошлом году был заметно дороже)
turnigy 9xr 1 70 70
skyzone 700d 1 130 130
Надо бы потихоньку излишки продавать, куда мне 3 с половиной коптера, если летает 1-2 раза в месяц вверх/вниз/влево/вправо и домой.
А с другой стороны… для фантома надо же еще телефон нормальный купить.
Чего то времени совсем не хватает, 2 недели менял крепления моторов и выхожу полетать наверное раз в месяц.

Пересобрал Y6, на многострадальной раме от трикоптера, заменил в третий раз крепление моторов к лучам (на потраченные деньги уже бы почти таротовую раму купил обычной гексы). Попутно как смог отбалансировал пропеллеры надфилем, получилось вполне не плохо (прошлый вариант
съемки с этого коптера) =)
Пробное видео без какой либо программной стабилизации, но покрашеное (после небольшой стабилизации плагином vid.stab или как есть с коптера):
www.youtube.com/watch?v=AjuWxNjBYZE
Не пойму что не нравится фотику, выставил режим фокусировки landscape, но похоже надо прям manual и крутить в даль, периодически сбивается, похоже в моменты тряски.

Чего то захотелось теперь управление зумом сделать, но фотик хитрый, когда пробегал мультиметром по контактам в поисках фокуса и спуска так и не понял как чувствуется зум, но похоже на переменный резюк.
Другой вариант сделать ретранслятор: для фотика давно лежит WiFi-PTP модуль, с оригинальным приложением работает, а вот другие с PTP через одно место и не всё, т.е. в идеал можно посниферить трафик, вытянуть управление и через WiFi uart всё делать. Надо думать, но лучше зимой думать, пока работаеть так - ничего трогать не буду 😛
ТТХ:
- рама на 12мм карбоновых лучах аля Девид
- 12х5.5 карбоновые пропеллеры с rctimer
- моторы 5010 620кв
- подвес DYS 2х осевой с контроллером от tarot-ового подвеса
- взлеьный вес не считал но где то 2.5…3кг
- фотик: nikon p330, настройки видео iso100-400, 1/60, ND фильтр включен всегда, для фото iso100-400, 1/100…1/320 (в зависимоти от условий + иногда ND фильтр + всегда RAW с брекетингом ±1)
UPD: а вообще нафиг всё это… в следующий раз фантом куплю, как только они его складным сделают и с аналоговым линком, прикинул все затраты, готовый фантом 3 про выйдет не сильно дороже аналогичного конфига собранного руками (с учетом подвеса, фотика, аппы и прочего)
В общем радости у ребенка хоть отбавляй, особенно когда погоняли вместе после отключения самопального ограничителя скорости* (он газует, я рулю для первого раза). А вот как дальше его обучить рулить (4 года только исполнилось), чтобы быстро и просто - фиг знает =)
Сломали в первый же день амортизатор об камень, ось/поршень выгнул обратно, вроде нормально ходит, но масло всё вытекло и крышка не закручивается плотно почему то (т.е. заливать что-то бессмыслено), заказал новые алюминиевые.
* газ с приемника -> ардуинка, pwm-магия и резюк (код github.com/SovGVD/rccar_esc_limiter) -> esc

Как всегда лениво (и времени не особо много) разбираться в новой теме, так что прошу прощения сразу, всем спасибо и плюсики в карму 😇
В начале лета у ребенка день рождения (4 года, может рановато), он стал интересоваться радиоупраляемыми машинками, игрушки уже есть, на сборках из nicd аккумах - фигня полная на 5 минут и в целом очень детское.
Хочу подарить ему (и себе, и даже жена не против) более-менее нормальную машинку. Дома уже имеются:
- пульт + приемники (2 самосборных коптера, пульт 2х стичный, а не колесо с курком, но сын уже привык к такому варианту от игрушек),
- аккумы 3S (~2200mAh 25-35С), 4S (~5600mAh 25С),
- 5.8 видео линк (машинка в прямой видимости).
Хотелось бы это всё попутно использовать, а не покупать что-то из имеющиегося заново.
Что хочется от машинки:
- вездеходность на уровне кочек/трамплинов/возвышенностей(без резких перепадов) около 10-15см, как подсказали в коментах - пересеченная местность без гонок
- длинна около 50см
- время “средней” езды 15+ минут, по возможности
- уложиться в ~200 usd
- минимум быстроломающихся/быстроизнашивающихся деталей
Ну и может чего сразу из механических расходников подкупить надо будет =)
Заказал недавно FPV камеру с сенсором Sony super HAD CCD 700TVL (если верить продавцу, закрались сомнения) всего за ~13$ (актуально в свете цены доллара). Был приятно удивлен качеством картинки (не смотря на один негативный отзыв на сайте). С самой камерой похоже ничего сделать нельзя, она не имеет каких то настроек и так же нет микрофона (если он кому то нужен в полете, например чтобы слушать пищалку или звук моторов).
Фотографии с камеры и самой камеры в комментариях.
Честного говоря уже не смешно: решил утром (пока голова не проснулась для работы) стряхнуть пыль с недостроенного коптера и приделать приемник пришедший еще месяц назад, подключил - не работает, начал крутить провод, заработал, отпускаю согнутость - не работает. Полез мультиметром прозванивать - тишина на проводе питания.
В общем китайцы снова странно обжали провод в изоляции и всего один волосок случайно контачил в серворазъеме. Такая фигня уже в третий раз у меня, первый раз из-за этого упал на multiwii, долго мучая людей не форуме, другой раз глючил наклон подвеса, в этот раз приемник не заработал. А самое фиговое, что я на этом же проводе (контроллер-приемник) уже летал несколько раз и есть подозрение что последнее фатальное падение (после которого коптер так и лежит сломоно-разобранным) как раз могло быть из-за отваливания питания, а не магнитных бурь и глюков GPS. Кстати на этом же коптере перепаивал разъем на GPS модуле, APM часто выдавал ошибку про GPS health, начал крутить в руках - проблема повторилась, начал выпаивал разъем и он отвалился - контактные площадки или вообще не были припаяны или были припаянны очень плохо.
Кстатии провод брал на гудлаке - переходник для подключения PPM приемника к CC3D, так что будте бдительны.
В общем срезал разъем (ppm sum) и припаял, решил что как соберу этот многострадальный агрегат, запаяю всё намертво, оставив единственный разъем для подключения аккума. И в идеале еще каким нибудь герметиком все голые контакты залью (найти бы еще чем).
Тот неловкий момент, когда давно не лазил полноценно по форуму, а тут только про унылые коптеры из набора спаяй-два-проводка. И это при том что сам только коптерами интересуюсь 3+ года. Но чего-то как-то ничего нового нет - горы одинаковых или не эффективных рам. Интересно в других хобийных разделах такая же фигня?
UPD: наткнулся тут на целый сериал с коптерами Rotor DR1
Чето с прошлого раза подумал что ардуинка для такой простой задачи как замыкание контатов это перебор, достал пищалку для поиска модели (на хк такие по 2-3 бакса), выпаял саму пищалку, влепил конденсатор с оптореле (?), работает.

Прототип

Схема
По логике надо было бы резюк (36ом вроде, с большим, около 600ом не хотел коротить) на +5в, но в схеме замыкается именно контакт земли, поэтому и решил туда резюк навесить. Конденсатор (470мкФ) чтобы сгладить мелодию до более-менее приличного синала, хотя судя по светодиоду всеравно не очень помогает и возможно и без него нормально всё работает. Замыкает контакты камеры всё тот же TPL621, которых купил на али 10 штук в ленте

Финальный продукт
Пришли мне тут отвертки, посмотрел на коробку, подумал что очень знакомое оформление, достал из ящика глючащий (залили его тухлой тыквой много лет назад) старый d-link dir-320 и сравнил:

Посложнее в этот раз было наладить спуск для фотика, в прошлые разы удобно к кнопке можно было припаяться или разъем был. А тут шлейф в блок, который не понятно как снять идет и всё, подумал через WiFi рулить, заказал всё, а чето так и не вышло - только с телефоном дружит со своей никоновской софтинкой, хотя везде писали что PTP протокол стандартный.
В общем сел вчера вечером с тестером, прозвонил контакты распаянные (респект инженерам, еще бы доку сразу или просто подписи, чтобы самому не тыркать) рядом с разъемом шлейфа.
Не буду кота тянуть за всякие места, сразу фотки, видео и ссылка на код:




Ардинка + два TLP621-1 (надо было бы сразу покупать сдвоенный TLP621-2) и чутка измененный код github.com/SovGVD/RC-camera-control
Не обращайте внимания что всего 2 проводка (фокус + спуск), земля общая при подключении видео канала, можно было бы и одним обойтись, так как код всеравно сразу всё замыкает.
Осталось закрепить нормальео на коптере и пофоткать в RAW с неба немного =)
Пока потихоньку собираю трешку, решил попробовать давно задуманное - сделать из коптерного видео картинку-крутилку, на коленке наваял скриптец, прошу ценить и об си ругивать
sovgvd.info/portfolio/rotate/index.php?p=pic_35_64…
Надавите на картинку и повозюкайте мышкой влево-вправо.
Ссылка на гитхаб, пока что наколенная штука, чуть позже будет приличный въюер github.com/SovGVD/video2photoroll
Никакого особого секрета - ffmpeg выдирает кадры из видео и imagemagick склеивает их в длинную картинку, потом эта картинка просто сдвигается на свою ширину, можно даже сервис модный намутить.
Если кто видел еще подобные ролики (пролет вокруг объекта), то кидайты ссылки, хочется покрасивее чего нибудь.
В идеале хочется потом попробовать автоматизировать процесс такой съемки и добавить еще одну ось, чтобы “смотреть” на объект почти с любой стороны.
не полный оборот sovgvd.info/portfolio/rotate/index.php?p=pic_28_64…
и еще sovgvd.info/portfolio/rotate/index.php?p=pic_33_64…
правильная съемка sovgvd.info/portfolio/rotate/index.php?p=dji_34_64…
ХК “безмерно радует” скоростью доставки, недавно пришли детали для трикоптера, при том что после заказа я уже успел передумать, сделать прикидку и напилить квадрик на редких свободных выходных. Про коптеры всё.
Дождался с Али влагозащищенную светодиодную ленту и сделал ребенку костюм на НГ 😛
Первая версия была монолитна и сделана на скорую руку, как и предполагалось 12 и 16AWG на 1-2см толстоваты для мест сгиба и быстро навернулись, оторвав дорожки с ленты…
После переезда откопал нормальные тонкие и гибкие проводки, жена “пришила” ленту к штанам и куртке, были сделаны нужне разъемы и предусмотрены сценарии падений в лужи (в default region +6 вчера было)…
Сразу прошу успокоиться (слишком много вопросов было во вконтакте), питается это добро от 8 AA батареей Energizer (лютая реклама!), запиханых в блок от аппы Turnigy 9x. Никакие LiPo не рассматривались изначально - предполагался мороз и падения, да и в лепить на ребенка 5Ah 25C страшновато. Если верить китайскому мультиметру, то кушает костюм около 0.7-0.8А при 12В. Знать бы емкость батареек…
Вылезли в город, подбежали местные телевизионщики, надеюсь порежут нормально новогоднее поздравление 😄 а то как то не очень вышло круто.

Чуть больше фоток в комментах.
Нашел время попилить новую складную H раму, ровненько на глаз пильнул пластины с RCtimer

И совсем забыл что когда скручивал на них обычный квадрик, дырки не совпали с лучами… в итоге насверлил профиль как есть:

И был несколько удивлен что болты криво влезли, а при сложении лучи покосились.

Ну да ладно, в идеале надо тогда свои пластины делать и всё пересверливать заново, а это лениво, да и полетать уже хочется на чем то новом.
Кстати вес вышел около 230 грамм, профиль 13х13х1.5(или 1), думал что будет меньше 😦 Придется потом еще немного посверлить технологических и не очень отверстий 😁
Уже не первый раз хочу сделать простой мелкий FPV коптер без особых наворотов, чтобы просто полетать метров на 300-500 по округе… Но каждый раз затея заканчивается полноценным коптером с подвесом, камерой, всеми доступными наворотами и т.д.
Итак, очередная попытка (в этот раз сделать мелкий трикоптер)… не увенчалась успехом, снова получился 450…550 квадрик под 11" винты 😁
Но в этот раз H и складной, а так как последнее время дел много, лени еще больше, то решено было собрать из того что есть, а именно запчасти от rctimer-ового квадрика. Сфоткал, пошаманил ползунками, отвекторизовал и “разрезал”:

По прикидкам всё не плохо сходится, почти идеально 550мм по диагонали, немного настораживает прочность конструкции, но учитывая прошлого летуна, всё должно держаться и работать.
Осталось дело за малым - найти время чтобы немного попилить и посверлить, а потом еще и полетать.
Пока не придумал что делать с шасси, т.к. мокро, а потом будет еще и снег, то хочется большие и высокие и в то же время компактные, легкие и складные. Пока что видимо буду брать шасси прошлого варианта (обычные от ATZ рамы, распиленные на 2 половинки и прикрученные болтами):

зы: а еще восстановил фотик, заказав из США б/у-шную основную плату, в прямом смысле попотел вытаскаивая/вставляя шлейфы.
Проблема решена - фотик труп ^_^ случайно подал около 7-8в, вместо 4, где то чето чпокнуло в нем и нехороший запах пошел, больше не включается.
Решил этой ночью чуток не поспать и уделить внимание переделки аккума, а точнее сделать чтобы питание шло с бортового, а не встроенного 0.6Ah LiIon, т.к. предполагал, что запись останавливается из-за просадки питания… Как я ошибался.
Итак, “тестовы стенд”:

Аккум Zippy compact 5Ah 25C 3S (но нам только 1S надо) явно должен держать ток хорошо, сколько бы фотик не кушал, тестер в качестве амперметра (наверняка приверает, но не страшно), пищалка в качестве вольтметра.
Аккум фотика:

земля, судя по “пингу” везде общая, поэтому заклеел скотчем контакты и пищевой фольгой вывел “+” контакт наружу и залепил скотчем, чтоб ничего не коротнуло случайно. (есть подозрения что на входе питания че-то всеравно стоит, но для теста сойдет)
Включаем:

Фотографируем (в средем поменьше, запечетлен момент фокусировки с подсветкой):

Начинает записывать видео:


И тут начинается самое интересное:
- просто пишем… аккум проседает до 4.02…4.05, видео писалось минул 6, забил, уже больше чем обычно в 2 раза
- подключаю HDMI кабель напрямую и фотику не хватает питание - по кабелю всё уходит на аппаратуру (весело заморгали светодиоды на конверторе и APM платке), поставил переходник с обрезанным проводом питания, всё завелось, начал писать, прошло 3 (именно 3, ну ±1 секунда) минуты, фотик перестал писал, аккум 4.02, ничего не написал о просадке аккума или таймауте, потребление 0.5-0.7А, фотик работает (включен) дальше
- включаю снова запись, опять 3 минуты и перестает писать, на аккуме в этот момент уже 4.00В было, потребление те же 0.5-0.7А
- вытыкаю HDMI кабель, фотик снова пишет и пишет больше 3 минут 😵
тваюж ногу за ногу! 😠 всё это время искал пути, чтобы фотик писал долго… а он просто не пишет больше 3 минут при вставленном HDMI кабеле. Может кто в курсе - что это за хрень может быть?
Где то тут, что-то сгорело

заказал замену на ebay, надеюсь поможет воскресить фотик
На этот раз решил понять, почему же он стал снимать 3-4 минуты видео (450-500МБ) когда на коптере. Поставил на окно снимать шатающиеся деревья (вполне себе рандомный паттерн, чтобы кодек не отдыхал). Писал 20 минут (2 файла на карте 2.1+1.6Гб), устал ждать, остановил, питание так же просело во время съемки, но писалось же. Жена предположила что фотик просто боится высоты 😁
Но идем дальше, при включении фотика и его одновременному подключения по HDMI к hdmi2av и далее, на конвертор и контроллер подается питание, явно не достаточно для полноценного старта, но сетодиодики на всем загораются. Видимо надо где то HDMI кабель порвать, чтобы такой ерунды не было.
UPD: спаял переходник, у которого нет проводка +5в, всё работает (HDMI конвертор больше не запитывается от фотика и не жрет и без того мелкий аккум)
Фиг с ним с видео, 3-4 минуты хватает для дилетантского дубля.
Фотик умеет делать фотографии во время съемки видео, прекрасно, но закралось подозрение что будет некий подвох, ибо всего с десяток кадров можно сделать при этом. И он есть (по клику фотка побольше):

Слева - фото, по центру фото во время видеозаписи, справа кадр, выдранный на компе (VLC) из видео записи (из-за честной полукадровости упала четкость, т.к. взял только один полукадр, но не страшно, суть осталась та же).
Вот такая фигня в итоге =) Пойду смотреть распиновку HDMI и думать - резать или не резать.
Хотя если уменьшить любую из фоток для “показать вконтактике”, то вполне ничего так любая из них (порядок тот же, нажимать можно).



UPD: провел эксперимент, вставил фотик в голый HDMI2AV, он радосно загорелся светодиодом, на питании при этом было 3.99в, включил запись на фотике, тот радосно поснимал 3 минуты и сказал что батарейки больше нет, досвидания. Тут же вытащил его из конвертора, нажал запись, начал писать, ждал 10 минут, забил - и так понятно что уже больше 3х минут.
Хотел перерезать дорожку питания на плате от HDMI, ножка есть, а дорожки нет, полез тестером тыкать - откуда ни возмись выплывает дорожка с питанием на 2 резюка с транзисторами, отпаял их - толку никакого, только запаивать обратно чуть с ума не сошел.

Из всего этого делаю вывод что плата многослойная и где то внутри перерезать дорожку явно не выйдет. Но узнал для себя, что не всё то GND, что много места занимает на плате.
Самодельный переходник

Забил все 8 каналов (точнее 7, но 2 дублируются из-за тупого микширования), а вдруг захочу еще чего подключить. И вот такая идея родилась (может уже сделал кто до меня).
Берем 2 ардуинки, одна вставляется в тренерский разъем и замещает один (или более, и по ним растягивается то что ниже) канал, вторая втыкается в приемник. Для коптера нормальных каналов можно вообще 4 штуки оставить.
К первой ардуинки цепляем кнопочки и переменные резисторы/ручки, в нужном количестве, на приемной стороне соотвествующее количество PWM выходов.
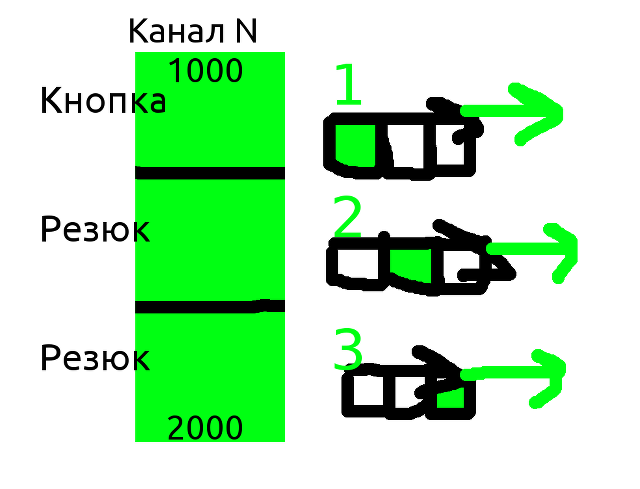
Идея в следующем, если не нужна супер точность позиционирования, то ширину 1000…2000 можно поделить на участки и передавать за раз свой промежуток.
Пример есть кнопка и 2 резюка (как бы 3 канала), теперь делим 1000…2000 на 3 участка + deadband, выходит что-то вроде 1000…1320 1330…1650 1670…2000, теперь ремапим каждый из источников 1000…2000 до 1000…1320 (+deadband+сдвиг). Передаем по очереди каждый из промежутков и аналогично распаковываем их на принимающей стороне, кешируя прошлый вариант, чтобы выдавать его, если нужная часть не пришла еще.
Плюсы - получаем 3 (и более) канала вместо 1
Минусы - точность пострадала в 3 (и более) раза, но для не особо нужных вещей, вроде пищалки, нажатия на кнопку фотика, включения подсветки этого будет более чем достаточно.
Если стики не нужны - можно поступить еще проще, с учетом помех, допустил что стабильно 1000…2000 превращается в 100-227, т.е. 127 вариантов или 7 выключателей с 2мя положениями. Т.е. 0000000 будет соответсвовать диапазону 1000-1010, 0000001 - 1011-1020 и т.д. до 1111111. Т.е. на передающей ардуинке 7 кнопок, на принимающей 7 реле/опто/мосфетов/итд
зы: коптеру рулят =)
так и не нашел я распиновки multi connector type3b для соньки, саппорт естественно мне ничего не расскажет, да и не факт что через этот разъем на фотике можно чем то рулить (хотя есть упоминание о LANC в одном из service manual для другого фотика, но судя по схемам оно дальше разъема никуда и не идет).
Ну дык вот, достал 3 проводка, отвертку, паяльник, лупу с подсветкой и тестер. Открыл фотик во второй раз, ужоснулся мелкоте и заточив паяльник и набравшись смелости влепил 3 проводка на кнопку спуска.

focus и shutter можно коротить сразу, но чтобы сохранить функционал, вывел все 3 проводка (хотя земельку можно было с любой части корпуса брать).
наконец то наладилась погода и при первой войзможности побежал испытывать свою гексу с нагрузкой в виде Panasonic G3 и 2х аккумуляторов Zippy compact 5Ah, потрепанных жизнию.

Никакой высокохудожественной цели (как обычно) не преследовал, просто хотел понять есть ли смысл в таком агрегате. Забегая вперед - для хобби никакого смысла, только трата ресурсов и возможность навернутся вместе с семейным фотиком. Для работы или более серьезного хобби, конечно же надо вешать что-то приличное, а не мыльницу.
Примеры отресайзенных кропов
😵 в первом коменте, а далее эти же фотографии, но отресайзенные от оригинала.
Помню давно кто-то советовал мне нажать и подержать кнопку Q.menu на фотике, но ничего не происходило, тестил в то время через HDMI. А тут наткнулся на видео, где видео выход работает на GF серии, но через обычный аналоговый AV. Отрыл провод, вставил в экран, зажал на Q.menu на 5 секунд и вуаял.
www.youtube.com/watch?v=hQMf8u7p6e8
Жаль только при съемке видео ничего нет, но мне то для фото надо сейчас, так что всё ок, не считая того что с дефолтным проводом фотик не влезет никуда, а заказывать из китая уже поздновато.
Может кто видел в продаже AV кабель для pentax или panasonic с очень-очень плоским разъемом?
…
Раскрамсал кабель из комплекта, вот картинка грубой распиновки:

грубой, потому что GND там почти на всех контактах, но работает и так.
Задумал я недоброе дело, для фото цеплять не 100 граммовую мыльницу, а Panasonic G3, нагуглил распиновку провода для фотографирования: www.doc-diy.net/photo/remote_pinout/ (там же под все фотики), оказалось что японцы выпендрились и пришлось городить схемку с резисторами, которые еще и перемешались все у меня в пакетике 😦
Спаял вот такого зверуса (под термоусадкой от 3 до 4 резисторов, ибо нужного номинала не нашел у себя, да и то всеравно не совсем точно получилось)

- выпаял NFET с убитого регуля (старый hk blueseries, не переживший прошивки).
Получилась вот такая схемка:

Резюк было лениво искать (между D3 и GND), постави какой нашел на 60 с чем то кОм.
Спасибо soliada, за проверку компиляции гугления.
небольшой скетч на основе примера Blink
void setup() {
pinMode(13, OUTPUT);
pinMode(3, OUTPUT);
}
void loop() {
digitalWrite(13, HIGH); // set the LED on
digitalWrite(3, HIGH);
delay(500);
digitalWrite(3, LOW);
digitalWrite(13, LOW); // set the LED off
delay(5000); // wait for a second
}
Засталяет нажимать на кнопку спуск в течении 0.5 секунды и повторяет это дело каждые 5 секунд. Позже это всё будет заменено на сигнал с пульта (+ есть желание 1 канал использовать под кучу подобных переключалок, но придется ардуинки и на отправляющую сторону ставить).
Америку большинству радиолюбителей не открыл, но наверняка кому то еще пригодится.
ну и видео работы этого безобразия
www.youtube.com/watch?v=sPU0riRdexI
UPD: новый код, чтобы с аппы нажимать кнопку, канал приемника в D2, нфет на D3
/*
(copypast from BaronPilot and MultiWii)
D2 - RC input
D3 - n-fet output
D13 - LED
*/
#define SERIAL_COM_SPEED 115200
int rawIn;
static uint32_t rcTime;
static uint32_t currentTime;
#define LEDPIN_PINMODE pinMode (13, OUTPUT);
#define LEDPIN_OFF PORTB &= ~(1<<5);
#define LEDPIN_ON PORTB |= (1<<5);
#define SHUTTER_PINMODE pinMode (3, OUTPUT);
#define SHUTTER_OFF PORTD &= ~(1<<3);
#define SHUTTER_ON PORTD |= (1<<3);
byte newbit,oldbit,changed;
unsigned long startIn;
unsigned long time;
int blockedRX=0;
#define MASKPCINT0 (1<<2)
ISR(PCINT2_vect)
{
time=micros();
newbit=PIND;
changed=newbit^oldbit;
if (changed&MASKPCINT0)
if (newbit&MASKPCINT0) startIn=time;
else rawIn=time-startIn;
oldbit=newbit;
blockedRX=0;
}
void setup() {
(SERIAL_COM_SPEED);
LEDPIN_PINMODE
pinMode(2, INPUT);
PCICR |= (1 << PCIE2);
PCMSK2 = (1 << PCINT18);
rawIn=1499;
delay(200);
}
void loop () {
if (currentTime > (rcTime + 20000) ) { // 50Hz
(rawIn);
if (rawIn>1500) {
LEDPIN_ON
SHUTTER_ON
} else {
LEDPIN_OFF
SHUTTER_OFF
}
rcTime = currentTime;
}
currentTime = micros();
}
Итак, утром сходили “полетать”, а точнее посмотреть сколько коптер провисит на новом и старом аккуме до пищалки.
Аккумы Zippy Compact 5Ah 3S 25C
Новый: 11 минут и 3.1в на банку сразу после приземления (позже до 3.3в поднялось)… влилось 5349 mAh 😁
Старый: 6 минут и 3.5в на банку сразу после приземления (позже до 3.7в поднялось)… влилось 3142 mAh 😕
То ли пищалки разные надо на оба аккума, то ли в утиль пора. При этом если старый зарядником разрядить, то вливается примерно 4.7Ah.

Спустя долгие недели ожиданий пришла новая рама для гексы ATG 700-AL , заказал как замену нынешней тяжелой самоделки (но самоделка в итоге по весу такая же оказалась как и купленная).
Собрал, подлетнул на megapirateng 3.0.1, вроде всё работает… но вот мучает меня вопрос по поводу вот таких двух оставшихся деталей:

Ума не приложу куда их приложить 😵
upd: оказывается это защелки для фиксации лучей в открытом состоянии
Собрал и вроде даже нормально (наконец то!) настроил подвес с БК моторками и контроллером с rctimer. Появилась новая проблема - камера подключается исключительно через microHDMI (type D который), кабел, которым раньше цеплял очень жестки. Вот подумалось - сколько минимум проводков надо HDMI (чето по разным таблицам больно много жил паять), какие именно и куда паять - ибо придется из лапшишки делать короткий отрезок, чтобы не мешать подвесу крутиться.
Заодно может кто знает как нагуглить магазин с microHDMI и HDMI раземами, чтобы удобно подпаяться. У китайвев и на ebay только готовые кабели (разрезать то не проблема, но хочется красивее сделать).
Полетал несколько раз с экраном и понял что очки мне нафиг не нужны, ибо сам очкарик и снимать/одевать крайне не удобно. Внимание это не пост продажа, а просто обсуждение стоит продавать за такие цены или нет
Поэтому думаю продать (или не продавать) это добро вместе с 5.8ггц 200mW приемником и передатчиком. И вот встал вопрос, какая адекватная цена для этого добра:
- самые обычные fat shark без всего + проводок из комплекта + набор линз для очкариков + (если найду после перезда) чехол, при этом из очков выведены 3 проводка для подключения своего приемника: земля, +5в и видео. (в левом “глазу” какая то соринка по центру)
- примник rx5808 и передатчик tx5823 из самодельных модулей, вот тут писал как я убил один из них, но потом купил новый rcopen.com/blogs/79585/15495 заодно на обоих клевер сделан и кондеры напаяны, но видимо руки из Ж, поэтому дальше метров 100 не могу отлететь, а помехи вылезают даже на расстоянии вытянутой руки, хотя народ с ним и на километр летает, в придачу дам DIP переключалки, чтобы впаять и каналы менять
- там же видно мелкую CMOS камеру 1.5см кубик, 480 линий
оринетировочно хочу:
за очки около 5000 рублей,
за приемник+передатчик 1000 рублей,
за камеру 600 рублей
Адекватны ли цены?
Забыл добавить - поменяю всё это добро на iPhone4 - нужен будет скоро для девелопинга
Выбрались сегодня днем полетать в Ратмино, толком ничего не вышло - ветер + холод и как итог замершие руки, непонятно как летающий коптер и камера на коптере протянула секунд 15-20 и выклчилась от недостатка питания (аккум замерз в металлическом корпусе).
Отсюда вопросы - как бы сделать чтобы камера не замерзала (пока думаю о питании от основного аккума) и пальцы рук не коченели (тонкие перчатки не спасают, а в толстых не очень удобно рулить)?
Ура, еще одно мечта сбылась - купить новые светосильный объектив, колебался между 14мм f/2.5 и 20mm f/1.7
Светосила победила, но видео 20мм не снимать или с MF, т.е. моторчик очень шумный внутри и медленный. А для фото - шикарен, выхожу на ночную охоту сегодня 😎
зы: in mint condition это бу, но в состоянии идельного, только 2 пылинки смахнул с линзы
В общем поставил сабдж, всё работало хорошо, пока не налепил подвес - каждое дергание сервы ведет к помехам и срыву синхронизации OSD. Поставил 470uF кондер на питание, стало чуть лучше, но всеравно какие то помехи есть.
Поставил наболтажник, который на USB проводах и кабелях питания бывает иногда, вроде как для защиты от помех - никаких изменений.
Может кто чего еще посоветует (кроме питать от отдельного источника)?
в первом коменте 3 картинки в png ~2.5мб
Как то давно заказывали с buyincoins моргающих бабочек (или свечки моргающие, в общем там много такого барахла) для украшательств, батарейки сели, а покупать новые нет смысла, разобрал, внутри ничего кроме хитрого светодиода не оказалось и решил я его пихнуть на коптер. Видео в коменте.
Таких бы светодиодов, да целую ленту и чтоб моргало по разному 😒
Вылезли с -Serj- полетать наконец то 😁 А то всё домашние тесты или на 5 секунд на улицу, да еще и погода позволила. Тестили всякие прибамбасы MegaPirateNG в меру возможностей коптера (я до AltHold, Сергей до автономного полета).
Итак - AltHold шикарен, не идеально конечно прибит по высоте, но даже с чуток прикрытым поролоном барометром держит высоту отлично и прыгает только при порывах ветра или резких маневрах (предполагаю что ветер задувает просто). (первое видео в коментах).
По поводу Land, takeoff, rtl, loiter, auto - работают, но все GPS-сное сильно зависит от этого самого GPS 😃 Который почему то глючил по страшному и терял спутники на ровном месте (есть нехорошее предположение что нечто глушит частоты в Ратмино).
В итоге: land - коптер садится сам, но достигая земли начинает по ней волочится в какую нибудь сторону, takeoff (а auto) - пару раз красиво взлетел, rtl - коптер летел на место старта, loiter - работал идеально, пока GPS не дурил, auto - может не поняли как точки выставлять, но в итоге всеравно коптер выполнил миссию (пролет по 2м точкам и возврат домой). (второе видео)
Не смотря на то что очень очень не хотел еще раз связываться с GPS, заказал себе тоже GPS (через месяц будет много-много геморая и танцев с бубном и коптером). Вот думаю не купить ли RF модули, пока скидка на них в rctimer…
Ну и наконец таки полетал в очках (последний раз это было около 1-2 минут и летом), обнаружив кучу косяков - сперва отвалилось питание приемника, потом обнаружил что открутилась антенна на приемнике, потом по непонятным причинам видео сигнал пропадал уже на расстоянии 30-40 метров (0.9ггц 200мватт с клевером), причем резко, как будто его глушили 😵 Подергал каналы на передатчике - нашел на котором смог на 60+ метров отлететь без помех, дальше не рискнул, т.к. летать так не привычно (хотя ощущения потрясающие), а идти за упавшим коптером потом далеко.
Кстатии в том же месте где пропадал видео сигнал, пропадал и сигнал с аппы, т.к. rctimer-ный failsafe срабатывал не однократно (выставил, чтобы тупо сбрасывал газ, если какие то проблемы, хотя правильнее было бы поставить LAND).
Конечный итог - доволен 😁
зы: крутой эффект в начале… всё видео и тест только ради него :lol:
Собрал наконец то коптер новый для fpv… а он не летает толком =( мозги multiwii с mpu6020 и на 328p, начинаю прибавлять газ, а он то никак не взлетает, а потом резко вверх уходит. eeprom почистил, прошивки перепробовал все от 2.1 до dev, включая правленные от mahowik, кривую газа убрал, пробовал взлетать без акселя - везде одна и та же фигня. Придется пирата с гексы снимать, всеравно пылиться будет всю зиму.
рама клон dji 450, моторы 2830 850kv, пропы 11х4.7, регули hk bs 30A (allnfet) перешитые, аккум 5Ah zippy compact, вес около 1кг
UPD: поставил криус с мегапиратом - P занизил до 0.13, сделал реверс pitch в планете - полет отличный, к комнате 3 на 2 метра без проблем летает, никаких подскоков или резкий падений 😁 судя по тому что и multiwii у меня раньше так же летал, предполагаю что проблема в железе мозгов (скорее всего в пайке, т.к. в одном месте точно коротить может питание контроллера), а не в прошивке.
UPD2: тестовый полет в коментах, чуток подрагивает, но управляется на отлично (под конец подергал его резкими движениями стиков)
Благополучно убил 5.8ггц rx5808 приемничек, сперва подумал: “а не наклонит ли мне антенку” и оторвал контакт, потом подумал “ща перепаяю на макетку и тихонько проводок прилеплю”, в итоге перепутал всё что можно было перепутать, включая +, - и video out и теперь приемник только немного греться умеет 😁
ЭЭх, опять расходы лишние, а так хорошо работало вчера днем.