А давайте обсудим Arducopter - APM

У меня ориентация коптера только сбивалась. Заходил в настройки рамы - выставлял Х и все летало нормально после этого.
WARNING!
Ехал сегодня по работе Решил полетать, был хороший солнечный день, ветер довольно сильный (но это нипричем). Нашел поле рядом с дорогой, разложился, пока ГПС ловил спутники я набросал миссию. Проверил синал - 8 спутников, взлетел с крыши авто, повисел, проверил режим LOITER на предмет точности координат. Дал АВТО, аппарат не долетев до 3й точки ушел в резкий крен и с резким ускорением свалил за деревья. Я сразу же включил возврат, но ему было по барабану. Через 10 секунд пропал сигнал телеметрии. Сел в машину поехал в известном направлении, метров через 200 появился сигнал на пульте. Короче после недолгих пеленгов, аппарат был найден на дачном участке в практически целом состоянии, только грязный. Сижу изучаю лог, причина ERR GPS0, ERR GPS2. Не очень приятная статистика, такой же глюг наблюдался практически во всех 5 крайних полетах (всего около 30 миссий), но всегда удавалось спастись переключением в режим удержания, и обратно в режим миссии. Еще одна закономерность, все эти бешенные срывы происходили между 2 и 4 точками в миссии. Еще параметр GPS Hdop, в последнем полете, скаканул.
Прошивка 3.1.4
Может кто ловил подобные глюки?
Я ловил это ошибки глича, походу что то всетаки америкосы подкрутили нам в гпс((((
Купил такой наборчик для телеметрии 3dr
А у него, заразы, вместо 5 пинов как на плате - 4.

Подскажите, чего мне теперь с ним делать? Разъем на 5 пинов у меня есть, но распиновки на плате в интернете найти не удалось. Или он такой вообще работать не будет т.к. предназначен для APM 2.0?
а вот такие графики как в мп получить?это явно не терминал
Купил такой наборчик для телеметрии 3dr
А у него, заразы, вместо 5 пинов как на плате - 4.Подскажите, чего мне теперь с ним делать? Разъем на 5 пинов у меня есть, но распиновки на плате в интернете найти не удалось. Или он такой вообще работать не будет т.к. предназначен для APM 2.0?
Что делать? Честно - так не задавать глупых вопросов. Читать тему, курить мануалы и даташиты. Ну неужели никогда не переведется народ с такими “детскими” по ардукоптеру вопросами?!
apmcopter.ru/…/telemetriya-podklyuchenie-modulejj.…
Вот, для Вас, пожалуйста 😃
а вот такие графики как в мп получить?это явно не терминал
Это явно терминал))) А Вы потыкайте все кнопочки, касающиеся терминала, и найдете…
а вот такие графики как в мп получить?это явно не терминал
Миниатюры
На первой странице во вкладках логи телеметрии по-моему
WARNING!
Ехал сегодня по работе Решил полетать, был хороший солнечный день, ветер довольно сильный (но это нипричем). Нашел поле рядом с дорогой, разложился, пока ГПС ловил спутники я набросал миссию. Проверил синал - 8 спутников, взлетел с крыши авто, повисел, проверил режим LOITER на предмет точности координат. Дал АВТО, аппарат не долетев до 3й точки ушел в резкий крен и с резким ускорением свалил за деревья. Я сразу же включил возврат, но ему было по барабану. Через 10 секунд пропал сигнал телеметрии. Сел в машину поехал в известном направлении, метров через 200 появился сигнал на пульте. Короче после недолгих пеленгов, аппарат был найден на дачном участке в практически целом состоянии, только грязный. Сижу изучаю лог, причина ERR GPS0, ERR GPS2. Не очень приятная статистика, такой же глюг наблюдался практически во всех 5 крайних полетах (всего около 30 миссий), но всегда удавалось спастись переключением в режим удержания, и обратно в режим миссии. Еще одна закономерность, все эти бешенные срывы происходили между 2 и 4 точками в миссии. Еще параметр GPS Hdop, в последнем полете, скаканул.
Прошивка 3.1.4
Может кто ловил подобные глюки?
Четыре дня назад поимел точно такой же глюк, прошивка 3.1.3
что то лог не получается прикрепить…
в продолжение поста #10426
все эти глюки по ГПС, настораживают, уверенность в полете падает.
Просматривал все глючные полеты, их объединяет GPS ERR, GPS Hdop>3
теперь буду внимательно следить перед полетом за Hdop.
ушел в резкий крен и с резким ускорением свалил за деревья. Я сразу же включил возврат, но ему было по барабану.
Как то нелогично при глюке ГПС включать возврат… Почему не стаб? Включили стаб и спокойно снижайтесь, ну или домой летите.
Как то нелогично при глюке ГПС включать возврат… Почему не стаб? Включили стаб и спокойно снижайтесь, ну или домой летите.
за доли секунд, трудно определить на глаз, глюк ГПС это или, что то другое, тем более когда коптер под таким креном и в динамике он стремительно теряет высоты, . В режиме возврата, у меня стоит подъем до 45 метров (по баро-сенсору), дальше я его перехватывал и всегда при аналогичных ситуациях он спасал, в этот раз, не произошло именно переключение режима, в логе есть ошибка по этому поводу. Замечал и раньше, что режмы не переключались, но редко, 1,2 раза было, но сегодня совпало все.
Не знаю как у вас,но у меня такие глюки были до того,как прописал Конфигурационный файл.После эроров не замечал.
apmcopter.ru/apm/…/nastrojjka-gps-u-blox.html
Не знаю как у вас,но у меня такие глюки были до того,как прописал Конфигурационный файл.После эроров не замечал.
apmcopter.ru/apm/…/nastrojjka-gps-u-blox.html
За совет спасибо, но все это как то подозрительно, первые полетов 20 такого небыло, летал при любой погоде, специально летал в дождь.,А тут буквально за последнюю неделю поймал 4. Но прошить ГПС не помешает, у меня такой же.
Могу только подозревать.
Что юблокс ,по не выясненным причинам ,может перегружаться во время полета,и после перегрузки юблокс переходит на дефолтные настройки (или частично дефолтные),а так как во флешке все чисто,приходится брать конфиг у ардупилота,а вот когда АР соизволит выстовить конфиг,это надо спрашивать у разработчика.Как мне известно,только один раз,вначале,но могу ошибиться.
А разработчик советует прописывать конфиг.
Так,что делайте вывод.
А у меня сегодня после замены регуляторов CIRCLE стал выглядеть так:
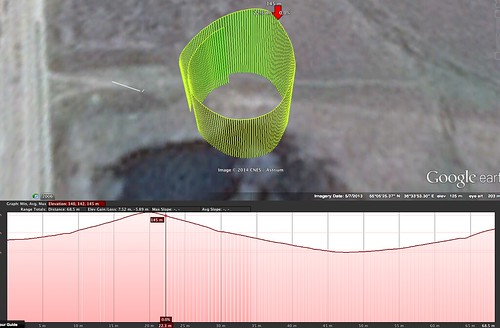
то есть с большими вариациями по высоте. Причем, то, что на профиле выглядит как плавное изменение высоты, на самом деле было довольно ощутимыми скачками.
Не думаю, что дело в регуляторах.
Похоже на влияние солнца, посколько скачки начинались в одной и той же фазе круга - то есть под одним и тем же углом к солнцу.
Но барометр у меня закрыт двойным слоем поролона вот так:

Может температура - жара все-таки…
Стоит обклеить прозрачную крышку металлизированным скотчем? (И от жары должно помочь, и от света)
Но барометр у меня закрыт двойным слоем поролона
У меня тоже было поролоном прикрыто, на ярком солнце высота скакала очень сильно, даже уронил коптер. Прямо в поле на поролон наклеил изоленту черную - стало нормально. Полагаю что поролон пропускает часть ИК спектра мешающего бародатчику.
Могу только подозревать.
Что юблокс ,по не выясненным причинам ,может перегружаться во время полета,и после перегрузки юблокс переходит на дефолтные настройки (или частично дефолтные),а так как во флешке все чисто,приходится брать конфиг у ардупилота,а вот когда АР соизволит выстовить конфиг,это надо спрашивать у разработчика.Как мне известно,только один раз,вначале,но могу ошибиться.
А разработчик советует прописывать конфиг.
Так,что делайте вывод.
Есть еще над чем работать разработчикам , по части обработки ГПС глюков.
Ьудем надеяться на новую прошивку.
встроенный компас МТК, та же проблема с ошибками ЖПС
Ну мтк общается по другому протоколу(нмеа),так что проблема может быть та же ,а причины разные.
Например,при потере фикса мтк может быть перестает выводить инфу.На что АР ссылается как ошибка.
Полагаю что поролон пропускает часть ИК спектра мешающего бародатчику.
А это мысль! Скорее всего так и есть. Попробую изоленту.
Еще одна интересность сегодня:
В районе строки 17450 аппарат дает газ в пол будучи в режиме ALT_HOLD. И держит этот газ пока я на строке 17724 не перехожу в Stabilize и не спасаю его. Успевает улететь метров на 50 вверх.
Я в параметрах журнала не силен, но вижу странность:
Барометрическая высота ведет себя вроде бы логично - газ в пол - высота пошла вверх.
Но GPS.RelAlt падает. Начинает как раз перед этим прыжком и продолжает падать несмотря на набор высоты.
Ну могу ручаться в каком положении был тумблер аппы во время прыжка, но по логу:
До прыжка висим себе в ALT_HOLD, уже после начала набора переход в LOITER (не знаю зачем…) и потом через ALT_HOLD в STABILIZE. Только после перехода в STABILIZE управление газом приходит в норму.
Ну мтк общается по другому протоколу(нмеа),так что проблема может быть та же ,а причины разные.
Например,при потере фикса мтк может быть перестает выводить инфу.На что АР ссылается как ошибка.
у меня на МТК фикс стабильный 19-20 спутников, самое интересное что в лойтере висит нормально, а когда домой приходишь видишь в логах эти ошибки. Надо попробовать чисто по глонасу полетать.