А давайте обсудим Arducopter - APM

GPS выдаёт в u-blox center данные в формате NMEA. Упорно не желая переключаться в UBX
Что значит не желая переключиться? Настройки забываются через некоторое время, или вы просто не знаете где их выставлять?
О Сергей, вы допустили страшную ошибку! В этой ветке не произносят слово Наза. За это тут сжигают на костре! Вон вам местная инквизиция сейчас кетчупа подольет в огонь! 😃
APM хорош для тех, кому не жалко своего времени, но жалко денег. Это вообще неактуальная железка уже. Ну разве для самолетов.
Сейчас на Атмегах уже контроллеров больше нет. Давно все на СТМ.
Я понимаю - размер конечно. Но Наза по размеру даже меньше получится.
На данный момент, (если не жалко денег) - лучше всего брать китайский Pixraptor со встроенной виброразвязкой. Мы недавно тестили - вибраций действительно ноль. Я был приятно поражен! Наконец хоть у кого-то мозгов хватило это сделать! По факту они сделали устройство лучше чем сам производитель 3DR, что опять же смешно!
И покупая все комплектом, вы лишаете себя той бессмысленной возни, которой приходится заниматься, покупая все по кускам.
Хотя Ардукоптер и возня - синонимы. 😉
Была бы Наза, уже бы летали давно.

На данный момент, (если не жалко денег) - лучше всего брать китайский Пикс со встроенной виброразвязкой. Мы недавно тестили - вибраций действительно ноль.
А можно про тесты подробнее, пожалуйста? Какая рама, моторы, пропеллеры? Как крепили контроллер к раме? Если взять F450, дешевые моторы и пластиковые Gemfan’ы, оно погасит вибрации?
Хорошо бы увидеть видео снятое с камеры типа Мёбиуса, прикрепленной к раме без подвеса, чтобы все вибрации передавались, и логи IMU.
Пиксраптор стоял жестко на алюминиевой самодельной раме с трешовыми движками из прошлого века. Пропы - АПЦ СФ не балансированные. Но они с завода уже лучше, чем большинство китайских отбалансированных.
Ясно, что ни одна виброразвязка не погасит вибрации от отстойных пропов. Не тешьте себя иллюзиями.
Ну хорошо, пусть пропеллеры будут APC. Хотелось бы увидеть тест, где на Мёбиусе дикое желе, а в логах вибраций - почти прямые линии.
На данный момент, (если не жалко денег) - лучше всего брать китайский Pixraptor
Благодарю за совет. Я мини АПМ взял именно из за размера. Я его пытаюсь притулить на место cc3d, на 330ую раму. Так что здесь размер имел решающее значение. 😃 У меня три коптерка. Два 250х на мультивие и cc3d и один 330ый. так что полетать есть на чём. Да и возиться мне нравится, почти так же как и летать. Так что тут нет проблем.😒 Я если буду брать пикс, то наверное тоже мини, и опять же из за размера.😃
Тогда повозитесь еще и ЖПС заработает! 😃
Хотелось бы увидеть тест, где на Мёбиусе дикое желе, а в логах вибраций - почти прямые линии.
Вы невнимательно читаете мои сообщения?
Вот здесь http://www.multikopter-forum.de/pixhawk-clone/1942-pixraptor-3.html немецкий коллега Рольф тестирует Pixraptor на алюминиевой самодельной раме с трешовыми движками из прошлого века и пропами АПЦ. И, если я правильно понимаю, гугл-перевод с немецкого, он недоволен вибрациями и экспериментирует с разными вариантами виброразвязки.
Цитирую Рольфа (гугл-транслейт):
Мой вывод о Pixraptor: хорошая идея, но внутренней затухания не будет использоваться для каждого вертолета. Для гараже с двигателем в любом случае бесполезно. Если бесполезно, то необходимо внешнее амортизацию для лотереи или сизифов труд, так что даже не покачиваясь внутреннего и внешнего демпфирования резонирует!
После того как я был в состоянии улучшить помехи на оси у (это жесткие провода периферийных устройств Китай также играл роль), значения XY еще раз до трех, я хотел бы знать, и имеют (случайно?) Предоставляется "матрас "(см картинку слева вверху) установлено.
Как вы можете видеть, Х и Y-ось значительно улучшилась, но Z-оси до скалы к катастрофе.
Я разобрали его снова и даю себе доволен низких значений. Для 17-дюймовой модели я ordere мне «нормальную» Pixclone.
раскачка бывает нескольких видов
Алексей, а подскажите, пожалуйста, мне тогда, раз уж речь о пидах пошла 😃
Были настроены пиды, на память, р 0.130, i не помню, d 0.008 вроде бы. Коптер летал отлично, но было одно “но” - при резком снижении в альтхолде его иногда (не всегда!) жутко раскачивало из стороны в сторону. При том, такими резкими рывками.
Попробовал перенастроить руками Р - получил 0.135 - но раскачка осталась.
Попробовал автотюн несколько раз, но погода была с небольшим ветром и приходилось “подруливать” коптер. В итоге, оба раза он Р в 2 раза занизил, I тоже примерно так же, d вроде 0.006 вышло. Коптер стал очень валким. Вернул “р” в исходное положение, попробовал - вроде более менее. Но в ветер коптер неуправляем. Вчера летел в РТЛ против ветра (ветер 20км/ч), затем перешёл в альтхолд, коптер наклонился в противоположную сторону градусов на 60, я даже думал, что упадёт, но выровнялся в итоге.
Думаю, i c d вернуть в исходные значения, но что тогда делать с раскачкой хз…
Может, вы что подскажете? Может, автотюн в безветрие ещё раз попробовать?
Коптер на 450 раме от dji, моторы 950кВ, регули 20А афро, батарея 3s.
он недоволен вибрациями и экспериментирует с разными вариантами виброразвязки.
Правильно, как я и сказал - но внутренней затухания не будет использоваться для каждого вертолета.
Поставьте кривые цанги например, и привет.
Меня результат порадовал.
У тех у кого с руками в порядке, имеют такой результат:
У коллеги ilovethgod с rcgroups, чьи логи Вы привели, карбоновая рама за 11к рублей и пропеллеры по 1,5к штука. Я думаю, что у него и APM на виброплощадке такой же лог нарисует.
Я это всё к тому, что если виброразвязка Pixraptor’а - не панацея, то, наверно, лучше взять Pixhawk Lite и сэкономить 2700р.
Было бы очень интересно увидеть результаты Вашего тестирования на алюминиевой самодельной раме с трешовыми движками из прошлого века и пропеллерами АПЦ СФ, чтобы понять, насколько Pixraptor подходит для моей ситуации.
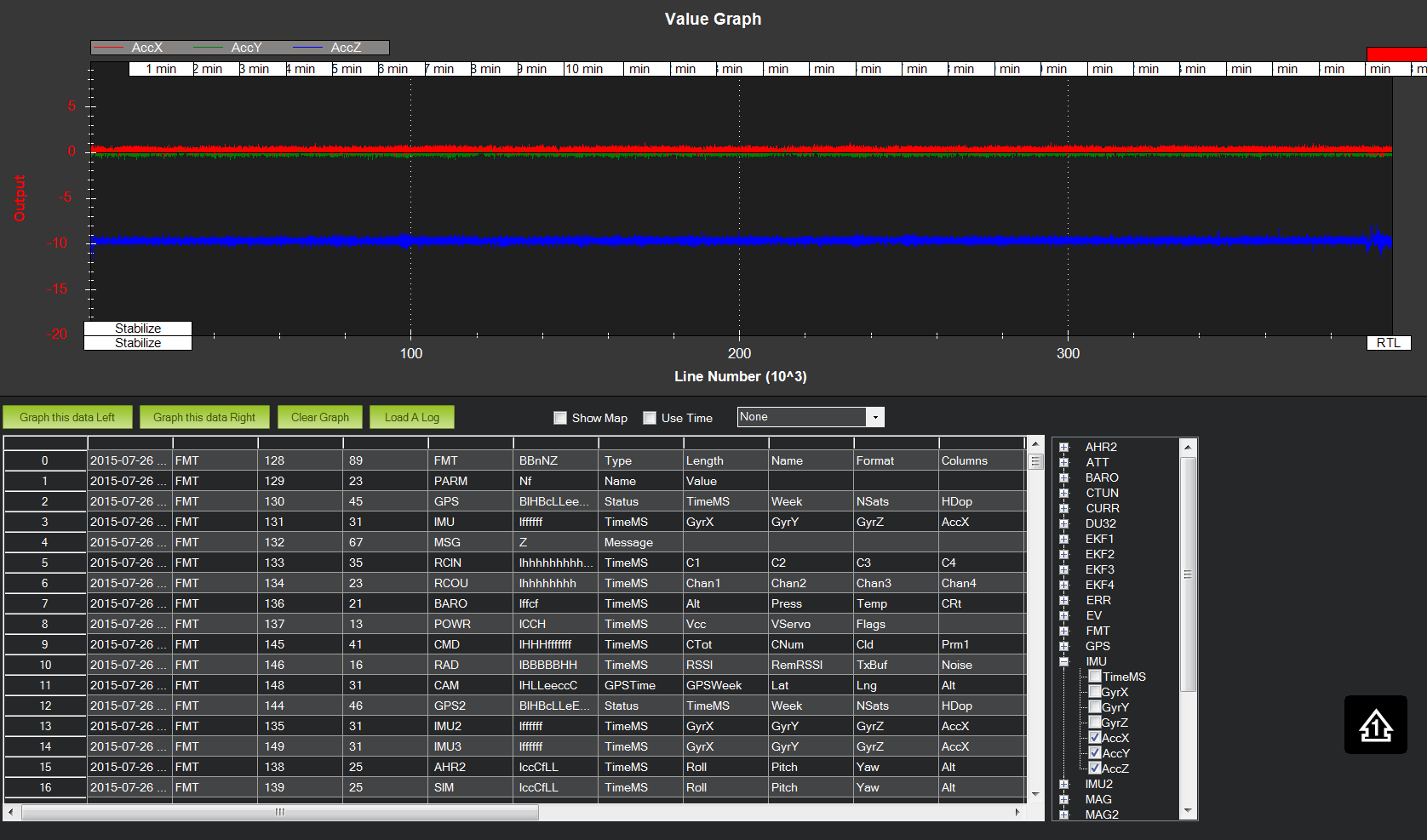
У пикса, с точки зрения вибраций, есть один жирный плюс - использование фильтра Калмана, на мой взгляд, это гораздо важнее, чем микродемпфирование акселерометра внутри. Было бы неплохо провести сравнение показаний apm, pixhawk и pixraptor на одной и той же раме с одинаковым методом крепления. Пиксраптор в руках не держал, но за пиксхавк скажу что в (почти) одинаковых условиях он выдает графики, мало отличающиеся от приведенных по ссылке (амплитуда вибраций порядка 0.6), а апм пишет вибрации с амплитудой порядка 2.
Было бы очень интересно увидеть результаты Вашего тестирования на алюминиевой самодельной раме с трешовыми движками из прошлого века и пропеллерами АПЦ СФ, чтобы понять, насколько Pixraptor подходит для моей ситуации.
Вот так же выглядит лог, как и ilovethgod.
а апм пишет вибрации с амплитудой порядка 2.
Это что без демпфирования что-ли он 2 пишет? Посто стяжки обычные в качестве демфера уже 2йку дают dl.dropboxusercontent.com/…/Скриншот 2015-05-12 21…
Да, почти без демпфирования (0.5мм жесткий скотч), ставилось ради эксперимента, из-за проблем совместимости регуляторов и выходного сигнала пикса.
Алексей, а подскажите, пожалуйста, мне тогда, раз уж речь о пидах пошла
у многих квадр проблема в быстром снижении, проблемя скорее физическая чем настречная.
при необходимости быстро сбросить высоту лучше использовать тактику соскальзывания, тоесть снижения с приличным углом пикирования или крена.
если пересматривать конструкцию - то сделайте выкосы моторов к центру градусов а 6-8, станет существенно стабильнее
если минимальными затратами некоординально улучшить ситуацию- повысьте тротл мин, моторы исключат нелинейный участок тяги
Алексей, я дико извиняюсь за помидор, но человек с вашим опытом мог бы посоветовать что то по теме вопроса.
прошу понять небольшой момент что многие тут совершенно здраво понимая что покупая самые дешевые китайские детали рискуют в этой лотерее
ведь можно было попробовать заказать оригинальный юблокс с дидронес, он мог бы служить эталоном в ваших экспериментах. он прошит, ничего не сбрасываает но вы выбрали путь исследователя и это ваш выбор. это дорого. за последний год стоимость заказанных мною образцов различных “новинок” составила около 300тр (причем это хобби и я человек с весьма скромным достатком). представляете как смешно выглядит разочарование в первом же дешевом китайском контроллере. Хотел сказать наверное ну попробуйте другие варианты, или готовые рецепты, от шурика например.
Не вижу ничего смешного. Тут все покупают неоригинальные комплектующие, потому что они в три раза дешевле, и у всех они работают. Какая лотерея? Человек купил в магазине вещь на которой написано - ЖПС для ардукоптера! Значит должно сразу подключатся и работать. Никаких экспериментов тут близко нет. Вы что-то путаете. Или в чем тогда смысл открытости проекта, если нужно покупать только у монополиста?
Так что когда два дня бьешься над тем, что у других сразу работает, это любого из колеи выбьет! Поэтому его замечание вполне понятно. И оно не относится напрямую к АПМу а к тому, что китайцы часто делают косячно - то провода перепутают, то надписи.
Это не говоря о том, что у самого АПМа косяков изначально хватало.
Человек купил в магазине вещь на которой написано - ЖПС для ардукоптера!
Скорее было написано “Навигация Подходит Ардупилот Спутники АПМ ЖПС Глонасс Пиксхавк Компас Магнитометр Хороший Качество”. А выбор покупать у монополиста, или за четверть цены и быть готовым к проблемам - лучше чем его отсутствие.
Gps подключенный через APM не всегда корректно реагирует на изменения. Некоторые он просто игнорирует, как то частоту. После перезапуска сбрасывает её на 57600.
Напрямую через usb-ttl адаптер к компьютеру подключать и настраивать пробовали? Для начала нужно понять, проблема в gps или самом миниапм, распиновка разъемов которого может варьироваться в широких пределах (это разработка китайцев с множеством жалоб, а не клон оригинала).
Тут все покупают неоригинальные комплектующие, потому что они в три раза дешевле, и у всех они работают. Какая лотерея?
шурикус, не заблуждайте народ, из категории “обыскал весь инет, убедился что ни на цент дешевле ни у кого нет” с вероятностью 50 на 50 приходит плата которую нужно как минимум пропаять, прошить, решить проблемы с неверно указанной распиновокой. Но не у всех моделистов есть навыки и паяльная станция. И терпение чтобы выявить ошибки распиновки и косяки схемы.
Много раз сталкивался с тем что на продажу выставлялись заведомо косячные изделия, яркий пример: одно время на ебее продавалась печатная плата апм 2.5 с запаянными туда резисторами и кондерами, за доллар штука. по ошибке эти платы выпустили не 4х слойными а 2х, два внутренних слоя -отсутствуют. Кто то влетел на ошибке производства но решил не пустить в мусор а слить на ебее. Похожая ситуация сейчас px4mini, скоро в продажу попадет партия с косяками в разводке, оптовая цена за такой пиксавк у производителя 20 долл, при том что у него же изделие с перевыпущенной платой будет стоить от 65
проблемя скорее физическая чем настречная.
А после автотюна коптер стал плохо управляемым, но такой сильной раскачки нет - есть только относительно лёгкое “дрожание”. В-общем, понял, спасибо! Буду экспериментировать.
Ещё вопросик. Хотя не совсем по арду…
Во вложениях фото моего коптера. Если смотреть на фото, то справа между лучами на стяжках идут “усы” приёмника, один вертикально вниз (обведён жёлто-зелёным), другой горизонтально между лучами (обведён красным).
Видеопередатчик 5.8ГГц на 1Вт перенёс на другой задний луч клевером вниз (как было - обведено сиреневым, стало так же, но на другом красном луче), теперь клевер рядом с одним из усов приёмника. Он может “портить” сигнал с аппы? По идее, 5.8 на 2.4 не даёт наводок, но всё же либо так совпало и я начал в таких местах летать, либо сигнал с аппы начал глючить и иногда пропадать.
Переносил из соображений удобства расположения проводов и “особенностей” полётов - этот бок реже заслоняется коптером, когда я летаю.
Подскажите пожалуйста, какое должно быть напряжение на пине питания разъема i2c?