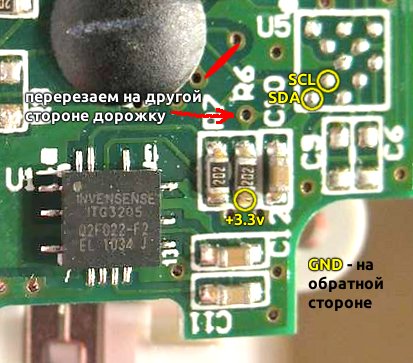
Всем привет! Просмотрел тему, очень интересно. Подскажите, а как будет выглядеть подключение, если я буду подключать выпиленную гиру IGT3205 и нунчак без переделки, без выпиливания то есть по шине I2C? Просто подключать и гироскоп и нунчак к шинам SDA и SCL? А в Вии раскоментировать
#define ITG3200
и
#define NUNCHACK // if you want to use the nunckuk as a standalone I2C ACC without WMP
Правильно я понимаю? Просто нунчак пока не хотел пилить, нужен для другого проекта.
Правильно я понимаю?
не совсем правильно, нунчак вообще не надо раскоментировать, он сам подцепиться… раскоментировать надо только если один нунчак будет, без гиры
Плюс если в итоге не получится самому написать, зальете потом коптерпайлота революшн, по моим обрывочным данным скорее всего это хардварь (цпу и датчики) и будет использована, окромя MPU6050, скорее всего как в 3d будет MPU6000
не совсем правильно, нунчак вообще не надо раскоментировать, он сам подцепиться… раскоментировать надо только если один нунчак будет, без гиры
А тогда еще вопрос, при таком подключении на гиру IGT 3205, на 9-й контакт тогда нужно + подавать? для перевода в slave режим?
незнаю никаких 9 контактов на пиленом wmp… там всего 4 провода: SDA SCL и питание с землей
ребята, еще возник вопрос
датчики пилиные из чака и вимоушина
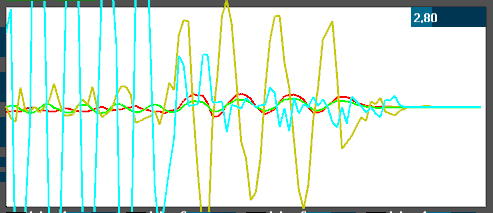
гироскоп работает нормально (голубой, желтый), а вот чувствительность акселя слишком маленькая (красный, зеленый), за счет этого предполагаю не четко происходит обработка, а также сплывание в горизонт
это да же видно по графику, вначале наклон вперед назад, отклонения на графике красная и зеленая слабые, происходит медленное, не полное выравнивание по горизонту, а вот дальше наклоны влево, вправо, амплитуда по больше и держит наклон соответственно лучше, почти не видно уплывания в горизонт, думаю если повысить чувствительность акселя, все нормализуется
acc_1G = 75; заменил на acc_1G = 7;
стрелка в гуи теперь как вкопаная останавливается при наклонах
ЗЫЗЫ думаю с acc_1G = 75; надо побаловаться
ЗЫЗЫЗЫ что бы не забыть, заметка для этих датчиков
версия 2.0
//****** end of advanced users settings ***********************************
/* ===================================================================== */
//if you want to change to orientation of individual sensor
#define ACC_ORIENTATION(X, Y, Z) {accADC[ROLL] = -X; accADC[PITCH] = -Y; accADC[YAW] = Z;}
#define GYRO_ORIENTATION(X, Y, Z) {gyroADC[ROLL] = Y; gyroADC[PITCH] = -X; gyroADC[YAW] = -Z;}
//#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = -Y; magADC[PITCH] = X; magADC[YAW] = -Z;}
больно уж мультивий меня затронул своей универсальностью и простатой,
😃))))
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"416128d73df9550077793889":{"_id":"416128d73df9550077793889","hid":4637,"name":"Aleksey_Gorelikov","nick":"Aleksey_Gorelikov","avatar_id":null,"css":""},"492b64673df95500777752b2":{"_id":"492b64673df95500777752b2","hid":41104,"name":"drozd79","nick":"drozd79","avatar_id":null,"css":""},"4d4325cb3df9550077756c92":{"_id":"4d4325cb3df9550077756c92","hid":79585,"name":"SovGVD","nick":"SovGVD","avatar_id":null,"css":""},"4e0330223df955007775116f":{"_id":"4e0330223df955007775116f","hid":91496,"name":"sulaex","nick":"sulaex","avatar_id":null,"css":""},"4efe7c1e3df955007774a5a6":{"_id":"4efe7c1e3df955007774a5a6","hid":109347,"name":"Dimm168pin","nick":"Dimm168pin","avatar_id":null,"css":""},"4f0047ad3df955007774a57a":{"_id":"4f0047ad3df955007774a57a","hid":109380,"name":"Dreadnought","nick":"Dreadnought","avatar_id":null,"css":""},"4f1a9b8f3df9550077749572":{"_id":"4f1a9b8f3df9550077749572","hid":111201,"name":"TimAU","nick":"TimAU","avatar_id":null,"css":""}},"settings":{"can_see_ip":false,"can_report_abuse":false,"can_see_hellbanned":false,"forum_can_view":true,"forum_can_reply":false,"forum_edit_max_time":30,"forum_can_close_topic":false,"forum_show_ignored":false,"forum_mod_can_delete_topics":false,"forum_mod_can_hard_delete_topics":false,"forum_mod_can_see_hard_deleted_topics":false,"forum_mod_can_edit_posts":false,"forum_mod_can_pin_topic":false,"forum_mod_can_edit_titles":false,"forum_mod_can_close_topic":false,"can_vote":false,"forum_mod_can_add_infractions":false,"forum_topic_title_min_length":10,"forum_reply_old_post_threshold":30,"votes_add_max_time":168,"forum_show_post_interval":7,"can_see_deleted_users":false},"section":{"_id":"61c9a54c3df9550077bb51e0","hid":123,"title":"Коптеры. Комплектующие, сборка, настройка.","parent":"61c9a54c3df9550077bb51fe","description":"","is_category":false,"is_votable":true,"is_writable":true,"cache":{"topic_count":1142,"post_count":370881,"last_post":"68eaaf32eede43b1c479d52a","last_topic":"68e1775300fb687e16f33657","last_topic_hid":572658,"last_topic_title":"SpeedyBee F405 V3 Барометр","last_ts":"2025-10-11T19:25:38.659Z","last_user":"68dbe48444153b38659b4133"}},"topic":{"_id":"4e5fc9183df95500774bcdda","hid":246336,"title":"пилим, пилим, пилим... (или как получить бюджетные датчики)","views_count":29718,"last_post_counter":156,"cache":{"post_count":156,"first_post":"4e5fc9183df95500774bd591","first_ts":"2011-09-01T18:04:08.000Z","first_user":"4e0330223df955007775116f","last_post":"5002a91e3df95500774bd6c7","last_post_hid":156,"last_ts":"2012-07-15T11:27:26.000Z","last_user":"4f0047ad3df955007774a57a"},"st":1,"section":"61c9a54c3df9550077bb51e0"},"subscription":null,"pagination":{"total":156,"per_page":25,"chunk_offset":148},"posts_list_before_post":["paginator","datediff"]},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}