пилим, пилим, пилим... (или как получить бюджетные датчики)

ежели кто приточит к проектам этот баро , то можно их притянуть по цене менее 500 руб …
конкретно доступны HP03SA … и ненада ниче пилить …
так и bma085 не надо пилить, таймкоп берет менее чем за 5 баксов в ленте
так и bma085 не надо пилить, таймкоп берет менее чем за 5 баксов в ленте
Да и любой может взять. www.ebay.com/itm/…/260923704012
а чего сыр бор то? HP лучше bma085 или лучше msчетотам?
Да и любой может взять. www.ebay.com/itm/…/260923704012
ну вот:)
так и где смысл пилить?)
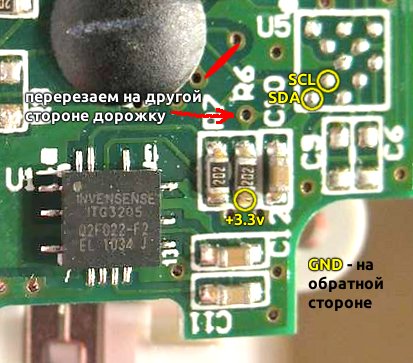
Всем привет! Просмотрел тему, очень интересно. Подскажите, а как будет выглядеть подключение, если я буду подключать выпиленную гиру IGT3205 и нунчак без переделки, без выпиливания то есть по шине I2C? Просто подключать и гироскоп и нунчак к шинам SDA и SCL? А в Вии раскоментировать
#define ITG3200
и
#define NUNCHACK // if you want to use the nunckuk as a standalone I2C ACC without WMP
Правильно я понимаю? Просто нунчак пока не хотел пилить, нужен для другого проекта.
Правильно я понимаю?
не совсем правильно, нунчак вообще не надо раскоментировать, он сам подцепиться… раскоментировать надо только если один нунчак будет, без гиры
ИМХО Брать надо это 10DOF IMU MPU6050 HMC5883L MS5611 for 3.3V Logic
И Это STM32F407/417ZG module
Плюс если в итоге не получится самому написать, зальете потом коптерпайлота революшн, по моим обрывочным данным скорее всего это хардварь (цпу и датчики) и будет использована, окромя MPU6050, скорее всего как в 3d будет MPU6000
не совсем правильно, нунчак вообще не надо раскоментировать, он сам подцепиться… раскоментировать надо только если один нунчак будет, без гиры
А тогда еще вопрос, при таком подключении на гиру IGT 3205, на 9-й контакт тогда нужно + подавать? для перевода в slave режим?
незнаю никаких 9 контактов на пиленом wmp… там всего 4 провода: SDA SCL и питание с землей
ребята, еще возник вопрос
датчики пилиные из чака и вимоушина
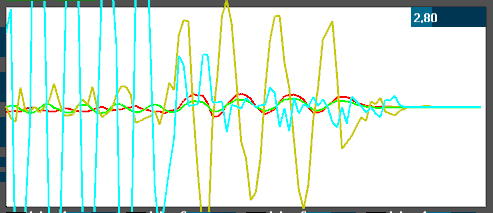
гироскоп работает нормально (голубой, желтый), а вот чувствительность акселя слишком маленькая (красный, зеленый), за счет этого предполагаю не четко происходит обработка, а также сплывание в горизонт
это да же видно по графику, вначале наклон вперед назад, отклонения на графике красная и зеленая слабые, происходит медленное, не полное выравнивание по горизонту, а вот дальше наклоны влево, вправо, амплитуда по больше и держит наклон соответственно лучше, почти не видно уплывания в горизонт, думаю если повысить чувствительность акселя, все нормализуется
где чувствительность акселя повысить?
ЗЫ датчики аналогичные этому посту
и первому посту этой темы
ответ нашел сам 😃
файл Sensors.pde
// *******************************************
// ADC ACC
// *******************************************
#if defined(ADCACC)
void ACC_init(){
pinMode(A1,INPUT);
pinMode(A2,INPUT);
pinMode(A3,INPUT);
acc_1G = 75;
}
void ACC_getADC() {
ACC_ORIENTATION( analogRead(A1) ,
analogRead(A2) ,
analogRead(A3) );
ACC_Common();
}
#endif
acc_1G = 75; заменил на acc_1G = 7;
стрелка в гуи теперь как вкопаная останавливается при наклонах
ЗЫЗЫ думаю с acc_1G = 75; надо побаловаться
ЗЫЗЫЗЫ что бы не забыть, заметка для этих датчиков
версия 2.0
//****** end of advanced users settings ***********************************
/* ===================================================================== */
//if you want to change to orientation of individual sensor
#define ACC_ORIENTATION(X, Y, Z) {accADC[ROLL] = -X; accADC[PITCH] = -Y; accADC[YAW] = Z;}
#define GYRO_ORIENTATION(X, Y, Z) {gyroADC[ROLL] = Y; gyroADC[PITCH] = -X; gyroADC[YAW] = -Z;}
//#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = -Y; magADC[PITCH] = X; magADC[YAW] = -Z;}
больно уж мультивий меня затронул своей универсальностью и простатой,
😃))))