ESC (ликбез)

случайно наткнулся на данную статью, очень понравилась
Контроллеры бесколлекторных моторов (Brushless ESC)
Текст: Арт Корал (RCHeli) и Джонатан Фелдкамп (Castle Creations)
Перевод: Aarc
Примечание к переводу:
- Аббревиатура ESC (Electric speed controller - Электронный контроллер скорости) будет часто заменяться на слово контроллер.
- Аббревиатура BEC (Battery eliminator circuit) будет заменяться на регулятор.
- Аббревиатура MOSFET(FET) (Metal Oxide Semiconductor Field Effect Transistor полевые транзисторы со структурой металл-диэлектрик-полупроводник) будет заменяться на слово ключ.
Если вы когда-либо задумывались над тем, для чего нужны разные компоненты контроллера, то в статье Джонатана Фелдкампа из Castle Creations вы узнаете о назначении его компонентов, а так же о том как осуществляется управление двигателем. Обладая этими знаниями вы будете лучше понимать какие технологии используются в контроллерах и сможете лучше подобрать модель, подходящую для вашего применения.
Основные компоненты и их назначение.
Задача контроллера состоит в том, что бы передать энергию постоянного тока от аккумулятора к трехфазному бесколлекторному мотору. Прежде чем мы перейдем непосредственно к контроллеру, полезно будет посмотреть как устроен мотор с точки зрения электричества. Типичный бесколлекторный мотор имеет три обмотки (фазы), будем называть их A, B, C. Фазы могут быть соединены методом “звезда” и методом “дельта”.
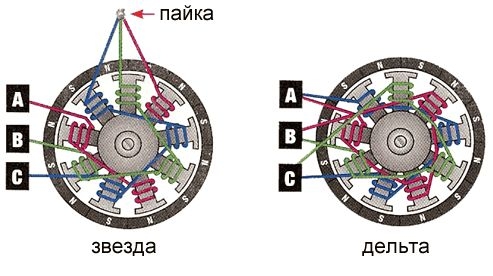
На картинке проводники образуют обмотки (фазы) и заканчиваются выводами. Хотя соединения обмоток сильно отличаются внешне, в плане электричества разница не большая.
Важно понимать, что все что мы делаем с фазами A и B, оказывает влияние на фазу С. Почему это важно, мы рассмотрим чуть позже. Так же обратите внимание, что в отсутствие каких-либо внешних сил (например, переменного магнитного поля), фазы это просто замкнутые куски провода, именно такими они являются для контроллера во время запуска мотора.
Работа контроллера заключается в том, чтобы передать мотору энергию батареи. Для передачи энергии контроллер использует MOSFET’ы - силовые ключи, которые могут открываться и закрываться за долю секунды. Условно схему бесколлектрной системы можно представить в сл. виде:

Картинка показывает, что закрывая ключи А и В, которые отмечены красной звездочкой, мы пускаем ток от точки +In через фазы А и В на землю. Ток, протекающий через фазы (они же обмотки), создает магнитное поле, которое притягивает или отталкивает магниты ротора и, таким образом, вызывает вращение.
MOSFET’ы (FET’ы)
Вызвать проворот мотора очень просто, можно просто подключить любые две фазы мотора напрямую к аккумулятору. (Очевидно, что делать этого не стоит, испортите батарею или мотор, если оставите батарею подключенной более чем на тысячную долю секунды. Отсюда следует еще одна из основных задач контроллера - ограничить ток протекающий через фазу при коммутации.) Фокус поддержания вращения в том, что бы открыть два нужных ключа в нужный момент времени и тут же закрыть ключи, пока ситуация не вышла из-под контроля. Пока ток протекает по обмотке, магнит ротора притягивается к обмотке (полюс S к N или N к S), тянет за собой ротор и поворачивает его. Как только магнит проходит обмотку, мы открываем другие ключи так, что бы теперь отталкивать магнит ротора (N от N или S от S) и проталкивать магнит по направлению вращения дальше от этой обмотки. Теперь повторите эту идею для всех трех обмоток и станет ясно, как заставить ротор с магнитами продолжать вращаться. Как только вращение началось, нам остается только переключать обмотки снова и снова, что бы поддерживать этот процесс. Для реального примера рассмотрите следующую фотографию типичного контроллера:
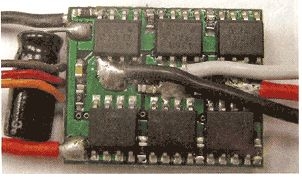
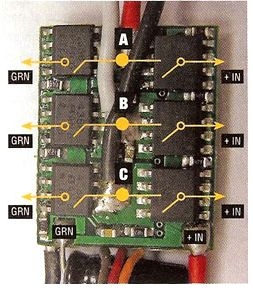
На фото хорошо видны шесть полевых транзисторов MOSFET, которые используются для включения и выключения фаз. Еще видны провод подключения к приемнику и большой конденсатор, который служит накопителем энергии для контроллера. Мелкие детали это различные фильтры, который нужны для правильной работы контроллера. Мощная пайка контактов обеспечивает протекание больших токов. На следующей иллюстрации поверх фотографии нанесено изображение ключей.
Теперь, когда мы получили представление о том, как поддерживать вращение бесколлекторного мотора, давайте рассмотрим функциональную диаграмму всего контроллера. В контроллере выделяются четыре основных блока: силовые ключи MOSFET, цепь управления ключами, микропроцессор и цепь определения положения ротора. Схема показывает, как эти части соединены между собой.
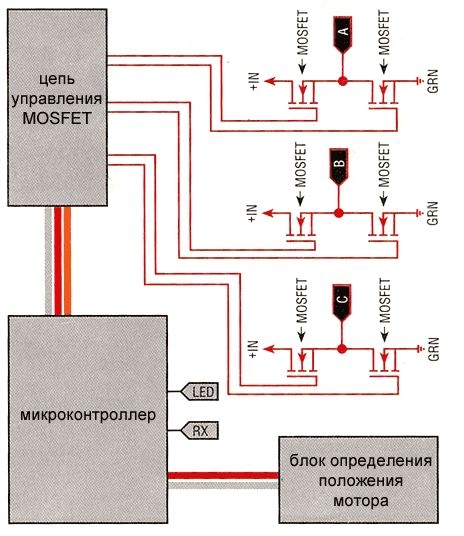
Теперь у нас есть представление о том, как работает силовая часть регулятора: MOSFET’ы работают как ключи, открываясь и закрываясь они вызывают протекание тока через обмотки мотора. Иногда мощности одного ключа недостаточно, для мощных регуляторов используются несколько ключей включенных параллельно. Нагрев регулятора практически полностью вызван внутренним сопротивлением ключей, каждый раз увеличивая кол-во ключей на фазу в 2 раза мы соответственно снижаем общее сопротивление ключей в 2 раза. Как альтернативу использованию нескольких параллельных ключей, можно устанавливать более качественные ключи.
Цепь управления MOSFET’ами.
Управление ключами не такая простая задача, как может показаться на первый взгляд. Если посмотреть на электрическую схему, мы обнаружим, что у ключей три контакта. Контакт, по которому ток втекает в транзистор, называется “исток”, контакт, по которому ток вытекает, называется “сток”, контакт, который отходит в сторону называется “затвор”, это переключатель ключа. Для того, что-бы открыть ключ, необходимо на затвор подать напряжение на 5-10В выше чем подведено к истоку транзистора. Для нижней части ключей (которые подключены к отрицательному контакту батареи) это относительно просто, нам надо подать всего 10 вольт. Для того, что бы открыть верхние ключи, которые подключены к положительному контакту батареи, нужно приложить напряжение на 10 вольт выше чем напряжение силовой батареи. К примеру, если у нас батарея LiPo 4S, к верхнему транзистору подведено напряжение 14.8В, но для того, что бы открыть ключ, к затвору нужно подвести напряжение в 25В. Разработчики регуляторов используют готовые блоки управления ключами, или разрабатывают собственные.
Блок определения положения ротора.
Для того, что бы знать, когда открывать и закрывать ключи, регулятор должен знать положение магнитов ротора вращающегося мотора. Это самая хитрая функция регулятора и именно поэтому раньше моторы и регуляторы использовали дополнительные датчики определения положения ротора (схема с сенсором до сих пор популярна в автомодельном хобби). Бессенсорные регуляторы, как видно из названия, обходятся без сенсора и используют уникальный алгоритм определения положения ротора: в каждый момент времени регулятор использует только 2 фазы для питания мотора, третья фаза при этом полностью отключена. Вращающееся магнитное поле наводит ЭДС в третьей обмотке. Измерив и проанализировав наведенное напряжение, можно определить как далеко провернулся магнит, и понять когда нужно закрыть текущую пару ключей и открыть следующую.
Микроконтроллер и его программное обеспечение.
Без сомнения, микроконтроллер это мозг всего процесса. Принцип его работы во многом схож с обычным компьютером: программисты пишут программу, компилируют и загружают ее в память контроллера. Микроконтроллер выполняет программу и в соответствии с ней посылает управляющие сигналы в цепь управления ключами, определяет положение мотора, обрабатывает сигналы с приемника, вычисляет требуемую выходную мощность и мигает светодиодом.
Обработка сигнала с приемника стандартна. Управляющий сигнал это серия импульсов, длина которых определяет выходную мощность. Ширина импульса в 1мс означает полностью убранный газ, 2мс - полностью открытый. Величина частичного открытия газа определяется шириной импульса между этими двумя значениями. Внешне все просто, но микроконтроллеру важно при этом еще и успевать отслеживать положение мотора, что бы не пропустить момент переключения ключей.
Работа мотора на среднем газу гораздо более сложный процесс, нежели работа на полном газу. Вместо того, что бы оставить два ключа открытыми на определенное время, микроконтроллер открывает один ключ и быстро начинает открывать и закрывать второй. На малом газу второй ключ закрыт большую часть времени, в то время как при приближению к полному газу, он открыт почти все время. Частота, с которой контроллер открывает/закрывает второй ключ, называется PWM-частотой.
Физические возможности регуляторов: 4s, 6s, HV, SHV и т.д.
Кроме деления по возможностям настройки, регуляторы так же делятся по физическим возможностям. Некоторые регуляторы рассчитаны на напряжение питания 12В, в то время как другие поддерживают батареи до 90В. Впрочем, с точки зрения микроконтроллера и его программы, задача одна и та же - переключать ключи по мере вращения ротора. Наиболее очевидное изменение, это детали, которые используются на печатной плате. FET’ы должны быть рассчитаны на более высокое напряжение, что зачастую, означает, что они имеют более высокое сопротивление, а стало быть не так хороши. Блок управления ключами должен иметь возможность поднимать напряжение еще выше и управлять бОльшим количеством ключей. Входные конденсаторы должны быть другими, обычно значительно больше по размеру. Проще говоря, каждый элемент регулятора должен быть проверен на соответствие высокому напряжению. Кроме очевидных вещей с ростом напряжение многое становится несколько более проблемным. Небольшие скачки напряжения при переключении, которые на 12 вольтах не играют никакой роли, с ростом напряжения могут быть достаточно большими, что бы открыть ключ, который не должен быть открыт в данный момент. (Представьте себе, что ключи на верхнем и нижнем уровне открыты в один момент времени - это равносильно короткому замыканию батареи.) Контроллеру требуется дополнительная аккуратность при работе с входным сигналом, что бы все операции проходили правильно.
ВЕС: Battery eliminator circuit (блок исключения батареи)
Другая сложность с высоким напряжением это BEC. Вспоминаются те далекие времена, когда все пользовались двигателями внутреннего сгорания в качестве силовой установки, а для питания бортовой электроники было достаточно небольшой батареи. Когда электрическая тяга и регуляторы стали более популярными, в них стали встраивать небольшой линейный блок питания бортовой электроники - BEC, который создает источник тока напряжением 5В и может заменить батарею бортового питания. Простой BEC отлично работает с сервоприводами, которые не потребляют много тока, и особенно хорошо работает при небольшом напряжении силовой батареи. Проблема обычного BEC в том, что он переводит излишек напряжения в тепло. Если у нас силовая батарея 12В, то от 6В надо избавиться. Если наши сервоприводы потребляют 1А тока, то 6Вт будет переведено в тепло. Если же у нас батарея 25В, то уже 20В надо перевести в тепло и при токе в 1А, мы получим уже 20Вт тепла. Это слишком много для линейного BEC и он просто перестанет работать при такой нагрузке.
Следующим шагом в развитии стало появление импульсных BEC. Импульсные BEC работают аналогично контроллерам, используют FET ключи для быстрого включения и выключения питания от батареи, далее полученные импульсы сглаживаются для получения на выходе постоянного напряжения. Наиболее важное преимущество импульсного BEC это то, что излишек напряжения не переводится в тепло, а КПД может легко достигать 90%.
Выбор правильного контроллера.
Теперь, когда мы знаем несколько больше о том, как работает ESC, нам проще выбрать правильный контроллер для нашего применения. Предположим, что мы уже выбрали мотор и батарею. Теперь нам надо прикинуть, какой ток будет потреблять наша силовая установка. Выбирайте контроллер, который имеет рейтинг выше чем ток полного газа ( к примеру если 67А это худший случай, то контроллера на 75А будет достаточно). Стоит сказать, что нет никакой проблемы в том, что бы использовать контроллер, превышающий ваши потребности, если он не утяжеляет вашу модель.
После сборки полезно сделать коротки пробный полет и проверить температуру контроллера, затем сделать более продолжительный полет и проверить температуру еще раз, что бы убедиться, что она не выходит за безопасные рамки. Температура контроллера должна оставаться ниже 85С и регулятор не должен шипеть, если прикоснуться к его корпусу смоченным пальцем. Калькуляторы силовых установок могут ошибаться, и каждый вертолет летает немного по-разному, поэтому дополнительная осторожность при первых полетах не повредит.
Заключение
Как вы видите, контроллеры имеют относительно простую конструкцию, однако хорошее программное обеспечение и качественные компоненты жизненно важны для правильной работы. От правильного выбора контроллера зависит, будет или не будет модель обладать дымовым эффектом, которого вы, возможно, вовсе и не желаете 😉. Отдельное спасибо Джонатану Фелдкампу и команде Castle Creations за их вклад в наше хобби.
Дополнение: почему работа на среднем газу менее эффективна и сильнее нагружает контроллер.
Прежде чем мы рассмотрим, почему работа на среднем газу может увеличить потребление тока, нужно кратко рассмотреть явление обратной ЭДС (back EMF-electromotive force). Во время работы мотор не только потребляет энергию, создавая вращение, но и работает как генератор, вырабатывая электроэнергию - обратную ЭДС.
Примечание aarc: Если предположить, что мотор не имеет внутреннего сопротивления, не теряет энергию на трение и вращается без нагрузки, то он будет набирать обороты до тех пор, пока не сравняется напряжение подводимое от батареи и величина обратной ЭДС, после чего потребление тока станет равно нулю, а ротор продолжит вращаться с постоянной скоростью. Если теперь нагрузить мотор, например заставить вращать ротор вертолета, то появится эффект проскальзывания, когда ротор будет вращаться медленнее, чем мог бы при данном напряжении, а величина подводимого тока будет больше чем ток обратной ЭДС. Эта разница токов и совершает полезную работу. en.wikipedia.org/wiki/Brushle...electric_motor
В результате мотор работает с проскальзыванием, из-за того, что часть энергии идет на совершение полезной работы, а часть на преодоление обратного тока, и чем выше нагрузка, тем сильнее проскальзывание и больше тока потребляет мотор.
Работа на среднем газу или в режиме гувернера(тот же средний газ) нагружают контроллер, несмотря на то, что он дает более короткие импульсы питания, тем не менее под нагрузкой ток импульсов увеличивается. При снижении оборотов обратная ЭДС уменьшается и разница токов обратной ЭДС и мгновенных импульсов питания может быть очень большая. Ватт-метры не могут показать эти броски тока, а отображают только средние значения.
Статья конечно интересная, но по большому счеру, рядовому пользователю не особо нужна, в плане общего развития только лишь.
Потому как мне например глубоко по тулумбасу, почему и как все там работает. Работает-хорошо, не работает-надо поковырять почему не работает. Но опять же глубоко я не полезу. Но опять же ограничусь тем что осмотрю элементы, если кто то подгорел-попробую заменить. А как и почему там что то работает мне как то неинтересно. Принципы знаю мне хватит. Это как с лампочками… горит, светит. А как и почему такая маленькая лампочка может освещать всю комнату-почти все даже не задумываются. И вообще. Если у меня сгорит регулятор, я скорее всего его просто тупо поменяю и все.
Потому как с ценами на компоненты в магазинах-зачастую получается что дешевле купить новый регулятор, чем заниматься ремонтом, или заменой полевиков…
отличный сборник полезной инфы, покопался в статьях, нашел некоторые непонятки для себя
Николай, это для общего развития, кому надо, тот прочтет…
Не знаю, где еще спросить, может вы подскажете:
Hobby King 30A ESC 3A UBEC + Движок outrunner 30A, 1450 KV + 3S
Первый старт нормально, все последующие (до отключения батарейки) как бы не может стартануть. Дергает винт туда-сюда секунды 3, потом все ОК, регулирует нормально, можно летать до опустошения питания, но стоит полностью остановиться, снова дергает.
Может заводские установки не “айс” для аутраннера? Есть идеи, как вылечить?
4. Recover to factory default setting.
- The factory default setting of ESC:
- The brake: off
- The types of battery: Lipo battery with automatic detection.
- The cutoff value under low voltage: middle (3.0V/65%)
- The angle of entrance in motor: automatic
- Setting for accelerated startup: smooth
- The setting Mode for helicopter: off
- The frequency of working: 8kHz
- Protection mode under low voltage: reduce power
p.s. Судя по статье выше, тормозит
уникальный алгоритм определения положения ротора:
Вопрос, как с этим бороться?
софт старт включи
Ну, он вроде как по дефолту и стоит:
6) Setting for accelerated startup: smooth
Не?
Отличная статья! Благодарствую! (У меня почему-то на самой статье нет кнопочки “спасибо”)
Ну, он вроде как по дефолту и стоит:
6) Setting for accelerated startup: smooth
Не?
- The Mode for helicopter: (use in application of helicopter)
Turn off the helicopter
Helicopter 1: the lag time of throttle response between the starting and highest speed is 5 seconds. However,
if the throttle is turned off after startup, the next startup will commence in common mode.
Helicopter 1: the lag time of throttle response between the starting and highest speed is 15 seconds. However,
if the throttle is turned off after startup, the next startup will commence in common mode.
Remark: once working under mode for helicopter, the brake and types of protection under low voltage will
be reset automatically to mode of no brake and reduce power mode separately regardless of previous setting of
ESC
6.Режим для вертолета: (использование во исполнение вертолет)
Выключите вертолет
Вертолет 1: временной лаг приемистость между начальной и максимальной скорости составляет 5 секунд. Тем не менее,
если газ выключен после запуска, при следующем запуске начнется в обычном режиме.
Вертолет 1: временной лаг приемистость между начальной и максимальной скорости на 15 секунд. Тем не менее,
если газ выключен после запуска, при следующем запуске начнется в обычном режиме.
Примечание: когда-то работает под режим для вертолета, тормоза и типы защиты при низком напряжении будет
сбрасывается автоматически в режим нет тормозов и уменьшить режим питания отдельно, независимо от предыдущей установки
ESC
Позвольте и мне вопрос по регулятору:
Пара rctimer мотор+регуль, 6шт. Моторы 2830-14 750KV, регули 20А. (Батарея 3S 5Ач).
Стоят на Y6 коптере. Балансированы на расходы вместе, стартуют одновременно.
Проблема.
Некоторые моторы тянут слабее - после калибровки “0”, стики приходится триммировать в сторону увеличения для слабого мотора. При относительно резком газе “слабый” мотор проваливается. (т.е. оттримировав, можно висеть, даешь газ - луч заваливается)
Отлетав некоторое время в режиме висения, обнаружил, что “слабый” мотор нагрелся сильнее всех. Самый “сильный” - соответственно слабее. Ранее пробовал менять самый “сильный” и “слабый” местами - тенденция по лучам сохранилась.
Вопрос.
Что может быть с регулятором, и может ли помочь его перепрошивка?
Спасибо.
может ли помочь его перепрошивка?
у меня такой же почти конфиг по моторам(850kv) и регулям(20а) на гексе, на квадрике летал нормально на гексе при спуске с высоты колбасит немного по сторонам, вчера решился на прошивку, сегодня если получится облетаю, думаю хуже не будет если прошьешь свои
Объясните плиз, что вообще дает прошивка??? Если я собираюсь напрямую управлять моторами через ШИМ - нужна мне прошивка или не ???
Здесь речь ведется о конкретных устройствах - спидконтроллерах (регуляторах хода). А прошивка - это то что “зашивается” в память контроллера - его микропрограмма, обеспечивающая его функционирование.
Если моторами вы управлять будете напрямую, то у вас этих устройств просто не предполагается.
Далее легко ответить, нужна ли вам прошивка и может ли она в чем-нить вам помочь. ))))))
Дык я понял, что прошивка - это то, что зашивается в контроллер))))) а за что она отвечает то??? Так и не ответили))) чем прошитый контроллер от непрошитого отличается?? И что такого прошивка сверхъестественного дает???)
а за что она отвечает то
не за что отвечает а что меняет ???
реакцию обращения к мотору (частоту)
тайминги
отсечку…
кстати, а после перепрошивки регулятор програмируется как-то?
или прошивка на мертво меняет все функции?
Кстати, на некоторых контроллерах пишут волшебное слово “programmable”, а на некоторых - нет. Я правильно понимаю, что первые соответственно шьются, а вторые - нет. И потерей каких функции мне это грозит??? вот на моих ( goodluckbuy.com/4pcs-30a-mystery-2a-5v-brushless-m… ) я так понимаю нет возможности шить их… Что я потеряю??? (общаться буду через ШИМ с ардуины…)
а за что она отвечает то??? Так и не ответили)))
Все ответили:
А прошивка - это то что “зашивается” в память контроллера - его микропрограмма, обеспечивающая его функционирование.
чем прошитый контроллер от непрошитого отличается
Прошитый может выполнять свои фонкции - управлять мотором. Непрошитый - просто груда электронного хлама. ))))))))
Под прошивкой подразумевается “перепрошивка” - т.е. замена родного программного обеспечения на альтернативное.
И что такого прошивка сверхъестественного дает???)
Альтернативные прошивки призваны что-то улучшить, или изменить, или заменить. То, что в данной области более желаемо или вредно. В контексте применения на коптерах, альтернативные прошивки дают более чуткую и быструю реакцию на изменение управляющего сигнала, что дает “мозгам” коптера возможность более точно корректировать свое положение.
В контексте своей проблемы я интересуюсь вероятностью исправления работы контроллера. Или это неисправимо и проблема не в управляющей программе, а аппаратной части самого контроллера.
Я правильно понимаю, что первые соответственно шьются, а вторые - нет.
Нет, не правильно. Программируемые имеют возможность изменять свои параметры (можно запрограммировать тормоз, тайминги, тип батареи и прочее). Непрограммируемые работают “как есть”.
кстати, а после перепрошивки регулятор програмируется как-то?
или прошивка на мертво меняет все функции?
Все зависит от самой прошивки. Что в нее вложат программисты то и будет.
Важно понимать: прошивка не меняет какие-то переменные, или параметры. Прошивка - это новая полная программа и полностью заменяет исходную.
Т.е. новая прошивка и может оказаться дополненной родной прошивкой, но сам процесс перезаписи (прошивки) меняет всю программу целиком.
P.S. Все это много раз “обсосано” на форуме - чуть ли не в любую ветку заходи. Немножко терпения и внимания… )))))))
Вопрос.
Что может быть с регулятором,
Проверьте все ли программируемые параметры заданы одинаковыми. Проверьте разводку, провода, разъемы, пайки.
Перепрошивка не гарантирует исправление ситуации, только если программы не разные залиты в регуляторы (или глюк прошивка словила).
Параметры выставлялись одновременно на всех регуляторах вручную (газ вверх-вниз-подтверждение сигналом). Перед подачей вопроса пересобрал силовую чать: вместо платы питания входные провода всех регулей впаяны “ромашкой” вокруг питающего провода, провода от регуляторов к моторам заменен на “правильные” и все тщательно пропаяно. На разъемах только моторы.
Больше всего смущает повышенный нагрев слабой мотоустановки.
возможно интересно будет кому нить, статейка о параметрах ESC www.rmodels.ru/art_apparatura/80001/
Параметры выставлялись одновременно на всех регуляторах вручную (газ вверх-вниз-подтверждение сигналом)
Значит “тайминги”, настройки тормоза не оказывают влияния. Остается только предположить проблему с работой регуляторов.
Ну и на всякий случай проверить установку мотора, не создает ли что-нибудь дополнительное сопротивление, например стопор со стороны уснановки задевает.
Хотя, это наврятли.
Дальше -либо искать причину с приборами. Либо поставить другие и посмотреть. А с этими начать эксперименты.
Пара rctimer мотор+регуль, 6шт. Моторы 2830-14 750KV, регули 20А. (Батарея 3S 5Ач). Стоят на Y6 коптере. Балансированы на расходы вместе, стартуют одновременно. Проблема. Некоторые моторы тянут слабее - после калибровки “0”, стики приходится триммировать в сторону увеличения для слабого мотора. При относительно резком газе “слабый” мотор проваливается. (т.е. оттримировав, можно висеть, даешь газ - луч заваливается) Отлетав некоторое время в режиме висения, обнаружил, что “слабый” мотор нагрелся сильнее всех. Самый “сильный” - соответственно слабее. Ранее пробовал менять самый “сильный” и “слабый” местами - тенденция по лучам сохранилась. Вопрос. Что может быть с регулятором, и может ли помочь его перепрошивка?
У меня таже проблема похоже. Регули turnigy plush 18а (у вас вроде как раз rc-клоны плющей) + turnigy 2209 (1050kv). Калиброваны одновременно + по карточке проверил что все настройки одинаковы. Симптомы теже: тянет в сторону и “слабый” сильнее греется. Сперва грешил на мех. часть, т.к. ресурс у моторов и регулей почти год. Поменял подшипники, которые скрипели, но ситуация не изменилась.
Подозрения:
- Т.к. моторы не перекидывал местами, причина возможно в самом моторе. Не знаю бывает ли такое, но к примеру магниты стали слабее или обмотка подкорачивает. Хотя когда в одном из движков обмотка явно коротнула, то нагрев гораздо более существенный за минуту-две на газе висения, а далее и вообще может двигатель стопорнуть из-за перегрева…
- До проблемы с неравномерной тягой было пару хороших крашей. И подозреваю, что в момент резкой остановки мотора происходит оч. резкий скачок тока, как по моторам так и по регулям, в результате чего могло выбить один из ключей (MOSFET). Отсюда теперь и “недомощь”…
- Вибрации! Не раз читал что от вибраций контроллер дуреет, в связи с чем дает меньшее управляющее воздействие на ESC… как решение: основательно проверить калибровку мотора и пропа.
Обязательно отпишитесь если найдете причину!
RID, благодарю за советы и комментарии.
Попробовал ради проверки тайминги на всех поднять - тот же результат
mahowik
Мои моторы почти нулячие - улицы едва понюхали. ))))) Крашей не было вовсе. Перегревов тоже.
Пропы отбалансированы по лопостям и по втулке. Как отбалансировать роторы - не придумал.
Плюс плата самая прорстая - КК, v.5.5. Установлена на стойках из силиконовой трубки:

Самые первые вылеты были без балансировки - колбасило его знатно. Налет у моторов хорошо если час набежит, максимум два. Из них не более 20 минут с несбалансированными винтами. Не знаю - могло ли повлиять.
Идея и с сопротивлением обмоток и со слабыми магнитами хорошо вписывается, более чем хорошо - сам ее же и рассматривал, да вот не сошлось - перемена моторов местами не спасла. =/
Придется пробовать еще раз моторы и регули перекинуть, в разных комбинациях, и полетать - до этого проверка делаласть только в статике - в руках (что куда больше тянет). Хотел уйти от этого куска работы - не судьба. )))))
Потом запасное ставить .
Мне кажется, что проблемы тут вообще нет. На самом деле греется не самый слабый мотор, а самый нагруженный. А нагруженный он может быть просто по причине несбалансированности коптера (по центру масс я имею ввиду), при этом для балансировки мозги нагружают какие-то двигатели больше, какие-то - меньше. Отсюда - нагрев, увод в сторону и т.п.
У меня на гексе моторы тоже неравномерно нагреваются, по краям которые - вообще холодные, сзади - горячие, спереди теплые. Причем каждый из них по температуре чуток отличается от остальных. Вообще не вижу в этом проблемы.
раньше то все работало на той же конфигурации
А нагруженный он может быть просто по причине несбалансированности коптера (по центру масс я имею ввиду), при этом для балансировки мозги нагружают какие-то двигатели больше, какие-то - меньше.
А тут гадать не нужно - взять и найти центр масс.
У меня, например, при подвешивании (за ниточку) в центре схождения лучей коптер висит ровно, с лееееееегеньким клоном вперед (при сборе рамы я все аккуратно и точно вымерял). Это без батареи.
Батарея же специально смещена вперед, для разгрузки заднего луча. Тем не менее греется именно задний (верхний больше, нижний чуть меньше) и нижний правый мотор. А оба левых отлично себя чувствуют.
Менял вчера левый верхний с задним верхним (на них даже винты одного вращения стоят) и тестировал снова: все то же - греется именно задний. Причем регуляторы все одинаковые по температуре на ощупь.
Второе - у меня мозги “глупые” - КК только гиры имеет, горизонт не ровняет.