Rabbit Flight Controller

а у меня ето значение в 10 раз меньше,по другому сразу колбасня и переворот…?
Ничего удивительного, аппараты ведь разные. У меня Н квадр. Уровень вибраций от ВМГ таков, что я креплю гоупро на раму без демпферов и нет смаза и желе. Видимо это все и влияет. Настройки ПИД это дело индивидуальное. У меня летит и на стоковых, но так как у меня нет подвеса, а я хочу получить более менее плавное видео, то чтобы исключить мельчайшие колебания, кивки коптера я поднял дифференциальную гироскопа. У меня и на мультивие это значение было почти на максимуме. При низком значении D, с набором высоты метров до 20, коптер сильно начинало трясти и он падал. Кроль так не трясет, но кивки при пролете наблюдались.
со спусками я гораздо осторожней себя веду. Гекса три с лишним кило весит, если будет кувыркаться, врядли остановишь вовремя…)
У меня квадр весит 2 с лишним кило и летает на аккуме 5500 мА. Тяжелый -это я знаю. Но зато у меня рама деревянная 😃. Да и с материалом СТФ 1,5мм тоже не экономил, а форм фактор Н всегда тяжелей X. Зато с вибрациями много меньше проблем и для компоновки много места.

Кроль так не трясет
у меня на простых aeolian кроль летал на любых настройках ипрактически любых винтах лижбы взлететь хватило и не перегревать мотор,а вот с T-motor 3506,фигня какаято крайне неустойчиво в полете,даже сделал наклон движков по 2гр ,всеравно какойто неустойчивый апарат,очень резкий размер 630-650,а по резкости на 300 . на graupnerах 12х4.5 или GWS 1060 ещо болееменее летает ,а на АПС больше11х3.8 до 12х6 становиться дерганым даже при включеных акселях постоянно надо ловить.Тут не камера не фпв не светит…летит только на цифрах погуе сверху в низ 20/9/28/15 и это при весе в 2кило на 5 тайгеров с 5Амперным аком…наверно в топку пойдет.изза експериментов с пидами уже винты кончились.(на холоде граупнеры как презики …на 1раз)

Dyna stab это “D”, а за что у нас отвечает “Д”? Я конечно ни на что не намекаю… Вы до сих пор тыкаете ПИДы на угад? Может стоит хоть раз разобраться с ними? В этой теме, что за что отвечает и ссылок на обучающие материалы ПИДов было как грязи.
“Д” отвечает за СКОРОСТЬ возврата коптера в положение, где он был до внешнего воздействия или скорость с которой коптер должен сменить положение, согласно команде с пульта. Ниже значение- ВЫШЕ скорость, выше значение - МЕНЬШЕ скорость(да-да, именно так, тут ничего не перепутано. Значение отрицательное, поэтому всё наоборот). На тупых моторках с М2М большим чем 450мм высокая скорость вызовет рывок, затем переруливание с последующей повторной корректировкой. Осцилляции. Меньше скорость - коптер медленнее и дольше возвращается к заданному положению- возврат точнее, без переруливаний и без резких рывков. Но и коптер “тупее”. Большое “Д” не для шустрых коптеров. От веса, мощности и назначения коптера зависит “Д”. Забыл добавить- большее “Д”, или меньшая скорость возврата, уменьшает влияние значения “П”, т.е. коптер слабее и меньше сопротивляется внешним воздействиям. Чаще будет сдут. Тут палка о двух концах- кому что.
Вы лучше не пиды обсуждайте… а ползунки ГПС закладки. Что за что отвечает. Я так до сих пор и не увидел адекватных ответов.
Может я отстал от жизни, но мне кажется-
height lock Всю жизнь была чувствительностью сонара “Р”, баро воооообще не причем.
aux height lock Всю жизнь была чуйка барометра “Р”, сонар и рядом не бегал.
Религия поменялась?
а у меня ето значение в 10 раз меньше,по другому сразу колбасня и переворот…?
Если к низкому “Д” добавить ещё и низкое “И” то очень запросто можно сорвать синхру. Да, можно кувыркнуться, особенно на тяжелом мультике с тупыми моторками. Теоретически, низкие “ИД” вызовут только дикие осцилляции, но если рег/мотор не очень дружны то срыв синхры = 1 мотор в ауте- запросто.

Так и не дождавшись однозначных ответов - собрал как есть.
Предлагаю потестить и прокаментить, поправить мои ошибки в русской тулзе настройки полетного контроллера LoveFlight Rabbit с 23й прошивкой.
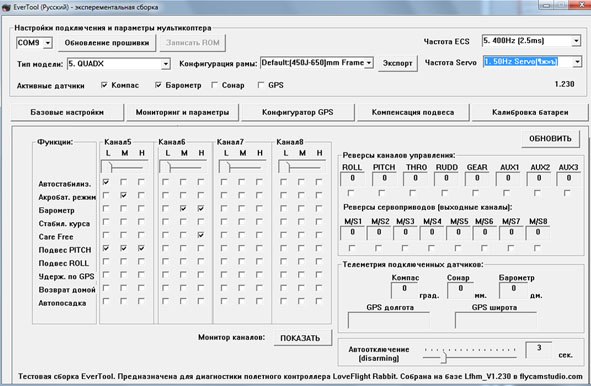
Программа Everfly_Tool_RU230b является экспериментальным ПО, однако с полнофункциональным интерфейсом, собранным и модернизированным на базе Lfhm_FW_V1.23 с адаптацией для русскоязычных пользователей.
Основные изменения по сравнению с оригинальной Lfhm_FW_V1.23:
• Интерфейс программы подвергся незначительной переработке с целью более удобного выполнения рутинных процедур конфигурирования мультикоптера.
• Адаптация программы на русский язык.
• Пункты меню настройки стабилизации полетного контроллера изменено согласно логике аналогичных полетных контроллеров.
• Убраны не нужные на мой взгляд ползунки и пункты в настоечном интерфейсе, они только сбивают с толку.
В целом логика интерфейса осталась прежней и привычной, поэтому переход на русскую сборку не будет дискомфортным для пользователей полетного контроллера LoveFlight, наоборот надеюсь сделает работу с GUI еще удобнее.
Софт для Windows, тестовая сборка от 25 января 2013 г.
Cкачать русский архив сборки, включая драйвера для платы и инструкцию на русском: EverTool_V23b.rar
Скачать программу настройки отдельно: Everfly_Tool_RU230b.rar (архив с исполняемым файлом, просто скачайте его в корень 23й прошивки, распакуйте и запускайте настройку с него)
Cкачать оригинальный архив сборки, включая драйвера для платы: Lfhm_FW_V1.230_20121209.rar (китайский и английский язык)
Инструкция по настройке коптера в программы Everfly_Tool_RU230b (в процессе наполнения)
ЗЫ Это тестовая версия, как бы бета. Я оттестировал софт на наших платах, но все же должен довести до Вашего сведения что ПО экспериментальное, при неверной настройке коптера возможно что угодно - то есть вы пробуете ее на свой страх и риск.
Так же как и некоторые параметры могут быть истолкованы мной неверно, поправляйте - буду вносить поправки.
Буду благодарен за Ваши отзывы о работе программы на форуме.
С уважением, Андрей Палеха
• Убраны не нужные на мой взгляд ползунки и пункты в настоечном интерфейсе, они только сбивают с толку.
*facepalm Это какие?
Ненужные на мой взгляд. Найдите десять отличий))
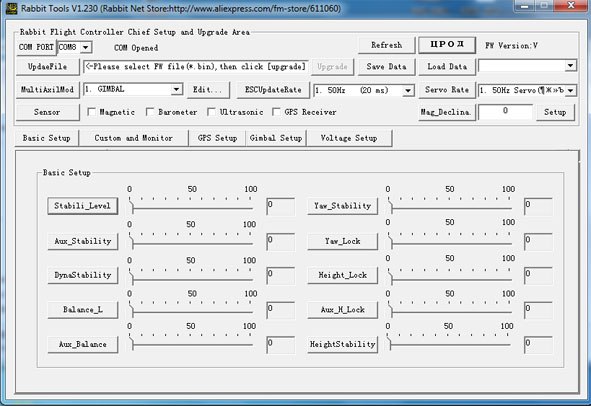

Найдите десять отличий))
Что то картинки из разных закладок сделаны
тут больше 10 отличий 😃
Вы до сих пор тыкаете ПИДы на угад?
Какие тыканья наугад? Каждому нужен аппарат в соответствии со своими потребностями. Мне нужен “тупой”, очень плавный, без рывков коптер, который не колбасит при спусках с высоты. Трюки я выполнять не собираюсь. И именно такие настройки ПИД обеспечивают нужное поведение аппарата. Каждому свои ПИД, значения по умолчанию работают, но доводка значений - это уже под конкретную раму, ВМГ, и смотря какое поведение коптера нужно получить.
Каждый коптер индивидуален, не представляется возможным посчетать ПИД математически, в некотором образе “тыкаться” приходится с каждым коптером, если конфигурация хоть немного отличается.
Вы не поняли насчет тыкать наугад. Понятно что каждому коптеру свое. И понятно что пид подбирается долго. Я лишь имел ввиду что нужно понимать что какой пид делает и тыкать осознанно! А не тыкнул- о! полетел плавно! круто!
Простой пример- если задрать “ИД” высоко и снимать кино пользуясь стабилизацией подвеса с мозга кролика, то получите постоянно заваленный горизонт и плавающий кадр. Плюс мультик будет постоянно “бултыхаться”. Поэтому нужно точно знать какой пид что делает и настроить конкретный аппарат точно, под конкретную цель. Слишком тупым для кинор его делать нельзя. Ко всему он ещё и точку будет плохо держать, постоянно уплывать черти куда. Руками на месте удерживать тоже не получится даже в штиль, он как на ветру будет плавать. Ну и в ветер снимать что-то будет просто невозможно. Да, дерганий не будет, но и полет будет пьяный. Опускайте “Д” назад, по 10 ед. пока не получите не комфортный полет, затем поднимите на 5 и оставте.
Вариант 2, если задрали очень высоко “Д”, то не забудте поднять и “П”. Высокое “Д” снижает значение “П” коптер- вялый, плохо сопротивляется воздействиям.

Прошивка 230. Отключены датчики - магнитометр, GPS, Sonik, Баро. Как отключить контроль батареи - непонятно! Не входит в состояние готовности.
слева на право 0- не горит, 1 - горит 00001101 Передатчик включен, приемник включен. На 211 такого не было! Что за …?
Помогло следующее - прошился на 211, снял галку с батарей, прошился на 230. Помогло до первого отключения батареи. ППЦ !
Как отключить контроль батареи - непонятно!
В 230 вроде и нет такой опции. Я никогда не ставил контроль батареи кролем. Висит внешняя адски громкая пищалка на балансире. Поначалу меня кроль бесил тем, что когда хотел тогда и выходил в готовность. Конкретно - иногда не загорался гироскоп и управление. Для того чтобы гироскоп перешел в готовность, нужно после подключения АКБ положить коптер куда угодно, лишь бы не качать, шевелить. Через пару секунд гироскоп проходит тест и загорается светодиод. Таким образом я на руках не смог перевести кроля в дышащий режим именно из-за того что коптер в руках не может оставаться неподвижным (“шевеленка”).
А канал управления (второй светодиод слева) не давал переходить кролику в дышащий режим из-за того что я на Н раме приемник FrSky сделал с длинными проводами, хотя они не такие уж и длинные - порядка 30 см, МГТФ с внешним плотным экраном. Вообщем перенес приемник к мозгу ,сверху. Теперь кролик стабильно переходит в дышащий режим, сразу как найдет спутники.
Вы не поняли насчет тыкать наугад.
Виталий. Все так и есть. Я осознаю настройки ПИД еще с мультивия. Собственно у меня и настроен он не просто тупым перемещением слайдеров. Мой коптер отменно держит горизонт, при кувырках он в момент возвращается в горизонтальное положение, при отпускании стиков без ГПС он висит практически на месте в штиль, при спусках его не колбасит, при пролетах он не делает кивков и рывков. То что и нужно. Добиться такого наугад настраивая ПИД наверное очень .сложно.

Виталий. Все так и есть. Я осознаю настройки ПИД еще с мультивия. Собственно у меня и настроен он не просто тупым перемещением слайдеров. Мой коптер отменно держит горизонт, при кувырках он в момент возвращается в горизонтальное положение, при отпускании стиков без ГПС он висит практически на месте в штиль, при спусках его не колбасит, при пролетах он не делает кивков и рывков. То что и нужно. Добиться такого наугад настраивая ПИД наверное очень .сложно.
огласите вас снимок ГУИ пожалуйста
огласите вас снимок ГУИ пожалуйста
Вот.

… я слайдеры на угад и то не все, двигал,когда у меня кроль только появился. но тогда общественность не знала тайного смысла,заложенного в них китайскими разработчиками. вот и приходилось практически выявлять их значение. )
я слайдеры на угад и то не все, двигал,когда у меня кроль только появился. но тогда общественность не знала тайного смысла,заложенного в них китайскими разработчиками. вот и приходилось практически выявлять их значение. )
Да, судя по рцгрупсам ПИД распределены вот так.

Мой Ушастый кажется заболел и медленно умирает…
Как я ранее писал: летал на 102 прошивке, поставил подвес на М7 - подвес работал…затем:
… пропали сигналы с сонара - перестало держать на малой высоте,появилась заметная задержка в холодном старте. Гуи показал - сигналов с сонара нет.
Перешиваю на 202… - не изменилось, затем на 203 - не изменилось, затем на 209… не изменилось, НО!!! к тому же перестала работать серва подвеса. Млин… толи лекарства не те… толи курс лечения не правильно подобран… Жаль зверька. Умирает.
Сегодня очень долго копался на 209 прошивке. Заметил что если поставить в Гуи сонар, подключить его, то платка вообще не загружается… 30 мин ждал. Если выткнуть сонар и Гуи убрать… около 1 минуты загрузка.
Вообще планирую заказать сонар на ебее.
- дайте ссылку на проверенный сонар. Чтоб и тип и производитель был качественный.
- Где китайцы (или в принципе кто-угодно…) публикуют все прошивки (чтоб найти свою стоковою…102 прошивку)
- Может ли быть такое, что сама плата выгорает частями… каналами… (по описанием моих проблем)
Это он еще живой… веселенький… цветастенький…
Часто встречаются непонятки. Но вот одно наблюдение объясняет многие случаи----После очередного приземления немного в снег перестал работать один мотор.Тщательный осмотр выявил белесый налет в месте припайки кабеля управления /три провода/контроллера. Зазор между контактными площадками 0.1-0.2мм.В сухом виде все работает. Вода-электролит-гальваника–утечка. Для низкоомных цепей не страшно. Но в платах управления и датчиках есть высокоомные входы.Отмывка налета спиртом и защита лаком решили проблему.В некоторых постах уже предлагали такое решение-----150% за. /и дождь и снег и звезд ночных полет …/ Удачи Всем.

Часто встречаются непонятки.
Уважаемое сообщество помогите!
После месячного простоя кролик не опознается ГУИ. Месяц назад загрузил 230 прошивку подключил к компу и все прекрасно виделось в ГУИ (WIN 7). Месяц не трогал его и вот сегодня решил дособрать квадр, поставил моторки подключил к кролю только землю и сигнальный провод, кроль-приемник-сонар-ЖПС запитаны от отдельного стабилизатора на кренке.Так вот, подключаю к компу кроля, комп звякнул что подключено устройство а дальше вхожу в ГУИ и он не видит кроля. Стоит WIN 7, все драйвера установлены, месяц назад все было рабочим. Переподключаю все, меняю на 211 Гуи и опять облом, как и первый раз просит сменить СОМ порт -меняю с 3 на 1 - порт открывается но дальше ГУИ ничего не видит. Перезалил драйвера - результат тот же. Отключаю все от кроля и никаких изменений. От пульта кроль управляется без проблем.
Где копать? Прошу помощи, пожалуйста.
Уважаемое сообщество помогите!
Для начала гляньте каким COM портом определился кроль.
У меня например СОМ12. В папке Устройства и Принтеры.
Уважаемое сообщество помогите!
Отвечаю сам себе. Решил просмотреть все СОМ порты и обнаружил что кроме первого открытого порта в ГУИ есть еще и 5 открытый порт, вот на нем ГУИ все видит. Не силен в этом но разве может одна программа сразу два порта откравать. Вот в чем была проблема.
Может кому поможет, а у меня пол дня отобрал.
программа сразу два порта откравать.
в другое гнездо усб вотткнули потому и другой номер порта
Не силен в этом но разве может одна программа сразу два порта откравать. Вот в чем была проблема.
У меня такое регулярно. Например если я укажу кролю COM3, то он напишет что порт открыт, но при этом ГУИ не покажет ничего. Я всегда, если не удается сразу определить кроля лезу в папку устройств и там вижу реальный порт кролика. Его и указываю в программе настройки кролика.
в другое гнездо усб вотткнули потому и другой номер порта
Не, воткнут в одно и то же гнездо и не перетыкаю, открываю ГУИ и вижу COM1 opened но ГУИ не реагирует на включение Display Data, не выходя из ГУИ перехожу на СОМ5 и он тоже OPENED вот здесь есть реакция, меняется баро и т.д., Показывает версию прошивки, все другие порты (проверял до 12 вкл.) COM not opened. Получается на одном гнезде открыто два порта, только один работает а другой нет. Что это?
У меня такое регулярно.
Первый раз с таким столкнулся, вижу порт открыт, комп звякнул значит должно быть в норме а оно вон как бывает.
COM1 имеет мало отношения к кролику. Он скорее всего есть на материнке. в виде готового внешнего разъема на материнке или в виде пинов на самой матери.
Картинка без подключения кролика к компу (сом1 есть):
После подключения кролика в один УСБ (сом4):
подключаю кролика в соседний УСБ, куда его не подключал никогда. сом20:
Получается на одном гнезде открыто два порта, только один работает а другой нет. Что это?
нет. не получается

Получается на одном гнезде открыто два порта, только один работает а другой нет. Что это?
Это разветвитель USB так работает, не обращайте внимание, смотрите номер порта в свойствах и назначайте его в ГУИ.