SteadiСopter

Ну вот и добрались руки сфотать то что вышло у меня! Спасибо Алексею за его мегаразработку и отличные фотки мануала по сборке, очень помогли в клонировании 😃
Какое растояние по диагонале между маторами получилось?
Думаю, будет уместно написать еще раз о значении наименований и сути новизны.
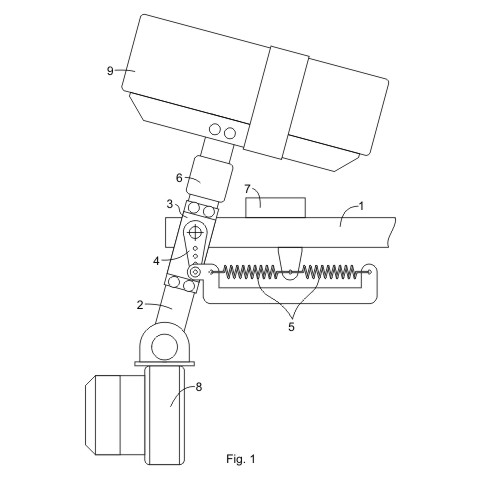
Сдесь использован термин «стэдикам». Это ошибка. Под брендом Стэдикам сегодня продаются самые разные крепления для камеры. Однако запатентованное изобретение «Стэдикам» – это рычаги с пружинами, которые переносят вес камеры на туловище человека. На мультикоптере нет человеческого тела и нет рычагов с пружинами. Поэтому термин «стэдикам» является привычным, но не корректным. Пример запатентованного элемента «стэдикам» на изображении:

Автором «стэдикам» является Garrett Brown. Изображение из его патента:
Garrett Brown является автором ряда патентов, где изображена камера с противовесом, но объектом изобретения являются только дополнительные элементы, а не сам принцип стабилизации.
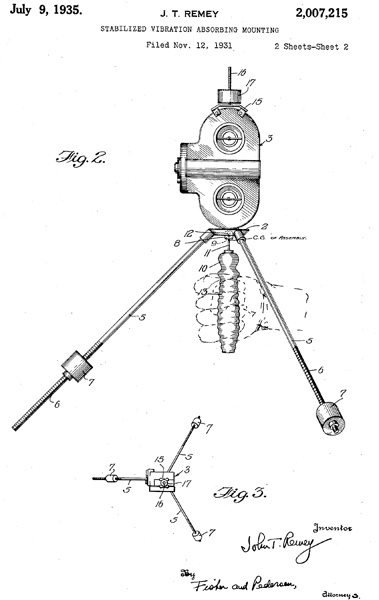
Этот принцип стабилизации был известен задолго до «Стэдикам». На изображении патент на изобретение 1931 года, здесь объектом изобретения является именно система с противовесами:
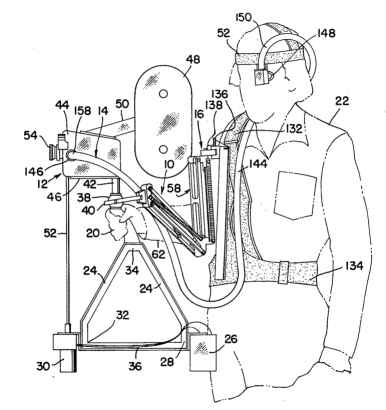
Запатентованной особенностью аппаратов ECILOP является способ вращения камеры с использованием пружин на сервоприводе и наличие гироскопа для предотвращения раскачивания:
В дополнении небольшой список линков на видео с борта:
Косые не дремлют!
Еще один клон/вариация на тему Эцилопа
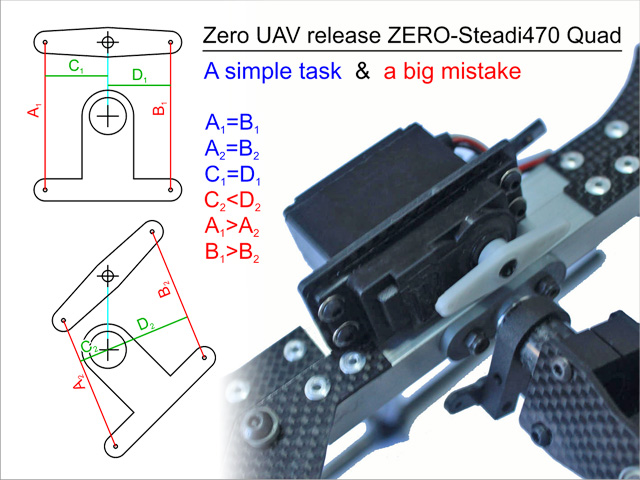
Zero-steadicam
И это не просто какиенить абстрактные кетайцы, это между прочим ZeroUav, прямые заклятые конкуренты DJI !!!
Не откажу себе в удовольствии потролить косых 😃
Картинка на английском, но суть должна быть ясна. У этого аппарата невозможен нормальный наклон подвеса:
Это не единственная проблема, кое о чем уже писалось ранее, например - проблема функционирования наклоненного гироскопа, так как они используют сенсоры разных плоскостей в одной коробочке.
Вот такие объяснения тому, что на демонстрациях Zero в действительности использован другой аппарат:
Zero-Steadi470–Test video: v.youku.com/v_show/id_XNDU3MDgwNjQw.html
Тень от Ecilop:

Всем доброй ночи!
На данный момент подыскиваю себе квадрокоптер для видеосъемок. Изначально рассматривал Xaircraft X650V, но натолкнувшись на Ecilop стал задумываться о приобритении сего аппарата. Т.к. на сайте производителя нет возможности приобрести RTF KIT, то я решил подсчитать во сколько этот аппарат обойдется. Прикрепляю свои расчеты в таблице с ссылками откуда брались цены. В расчет не включен передатчик и приемник (на начальном этапе планирую использовать turnigy 9X), а также стоимость доставки.
Буду признателен, если кто поможет советом. Все ли я учел в расчетах? Возможно есть др., более дешевые магазины.
Всем доброй ночи!
На данный момент подыскиваю себе квадрокоптер для видеосъемок. Изначально рассматривал Xaircraft X650V, но натолкнувшись на Ecilop стал задумываться о приобритении сего аппарата. Т.к. на сайте производителя нет возможности приобрести RTF KIT, то я решил подсчитать во сколько этот аппарат обойдется. Прикрепляю свои расчеты в таблице с ссылками откуда брались цены. В расчет не включен передатчик и приемник (на начальном этапе планирую использовать turnigy 9X), а также стоимость доставки.
Буду признателен, если кто поможет советом. Все ли я учел в расчетах? Возможно есть др., более дешевые магазины.
Два полетных контроллера точно не требуется.
Собственно, комплектация отличается от любого другого квадрокоптера со стабилизируемой камерой - наличием двух дополнительных гироскопов.
Бюджетные варианты гироскопов - HK401B - по 11 долларов (этот вариант не поддерживает ВЧ ШИМ, но с NAZA и MK работает).
RTF версию мы предложим скоро, но это будет комплект для тех, у кого денег на много больше, чем времени и знания.
Так что для тех, кто читает этот форум, наиболее разумным будет самостоятельно собирать аппарат. Тем более, что рано или поздно его все равно придется чинить.
коллеги, подскажите какой частоты PWM сигнал на выходе на gimball мозгов CRIUS All In One Pro v1?
Собираюсь ставить эту плату на Ecilop, там дополнительные гиры втыкаются в выход gimball перед сервами подвеса и есть информация что некоторые дешевые гиры, например 401-я, не понимают высокочастотный PWM ( ШИМ) сигнал. Может частота как-то регулируется прошивкой или она жестко забита в железе?
какой частоты PWM сигнал на выходе на gimball мозгов CRIUS All In One Pro v1
Задается программно. У меня такие мозги на подвесе с прошивкой Вий. Неплохо работают, толь программная настройка утомляет.
Задается программно. У меня такие мозги на подвесе с прошивкой Вий. Неплохо работают, толь программная настройка утомляет.
верно ли я понимаю, что частота PWM серв подвеса задается в этой строчке?
/* Default 50Hz Servo refresh rate*/
#define SERVO_RFR_50HZ
и еще подозрительный кусок, значение которого я не понял:
/ PWM Setup
/* activate all 6 hardware PWM outputs Motor
if activated:
Servos = 8-bit Software PWM
if deactivated:
Servos = 10-bit Software PWM */
//#define HWPWM6
UPD:
подключил 401 гиру, подвес дергается при ее движении и тут же возвращается на место, ход подвеса совсем небольшой (тестировал не на Эцилопе а на другом подвесе) как я понимаю так и должно быть?
Что есть зачем и как это настраивать.
За наклон камеры и компенсацию наклона корпуса отвечает полетный контроллер. Прямой сервопривод передает на камеру дергания (сноска 1). Что бы устранить дергания требуется инерционная стабилизация. Что бы инерционная стабилизация работала необходимо устранить жесткую связь между подвесом и рамой. Для этого установлены пружины на сервопривод. Система с пружинами автоматически превращается в маятник, который будет раскачиваться. Для предотвращения раскачиваний сигнал от полетного контроллера на сервопривод подается через гироскоп.
Так как гироскоп отвечает только за предотвращение раскачивания, то его можно настраивать без полетного контроллера, подав сигнал прямо с приемника.
Настраиваемые параметры гироскопа:
Если гироскоп не ослабляет, а усиливает раскачивание, то нужно включить реверс;
Параметр задержки – минимум;
Ограничение хода сервомеханизма – максимальный ход без ограничений;
Экспоненты и пропорции – не применять;
Скорость реакции - макимум;
Тип сервомеханизма – установить по факту;
Режим работы – обязательно обычный («Rate», «Normal»).
Настройка величины усиления осуществляется так:
Начните с максимального значения реакции. Если сервомеханизм начинает дрожать когда подвес не шевелится , то уменьшайте значение реакции. Толкните подвес пальцем, он должен плавно вернуться на место и не раскачиваться. Если есть раскачивание, значит реакция гироскопа недостаточна. Если при максимальном усилении («Gain») раскачивания заметны, то может помочь следующее: используйте более быстрый сервомеханизм с минимальной мертвой зоной («Dead band»), используйте более тугие пружины, используйте другой гироскоп.
Гироскоп оси бокового наклона устанавливается на сервопривод. Что бы уменьшить влияние шумов сервопривода используйте двойную липучку с металлической пластиной в промежутке (обычно входит в комплект гироскопа).
Очень важно обеспечить свободное изгибание проводов между рамой и подвесом камеры. Провода не должны стучать и тереться о гироскоп.
Сноски:
- Плохой подвес с прямым редукторным приводом – сильные дергания; дорогие подвесы – меньше дерганий и больше задержек из-за дополнительного редуктора. Подвес с прямым бесколлекторным приводом дает мягкое вращения, но тяжелый, слабый и много потребляет энергии.
верно ли я понимаю, что частота PWM серв подвеса задается в этой строчке?
Верно.
и еще подозрительный кусок, значение которого я не понял:
Это я не трогал, но подозреваю, что это разрешение сервы.
Два полетных контроллера точно не требуется.
Собственно, комплектация отличается от любого другого квадрокоптера со стабилизируемой камерой - наличием двух дополнительных гироскопов.
Бюджетные варианты гироскопов - HK401B - по 11 долларов (этот вариант не поддерживает ВЧ ШИМ, но с NAZA и MK работает).
RTF версию мы предложим скоро, но это будет комплект для тех, у кого денег на много больше, чем времени и знания.
Так что для тех, кто читает этот форум, наиболее разумным будет самостоятельно собирать аппарат. Тем более, что рано или поздно его все равно придется чинить.
Спасибо.
Случайно наткнулся на вашу ветку на форуме rcgoups. Очень много полезной инфы для себя от туда подчерпнул. Надеюсь и эта ветка тоже будет процветать.
P.S. Пока решил остановить свой выбор на NAZA FC
Если кто уже собирал ECILOP Easy Поделитесь своим опытом плиз. С какими трудностями сталкивались. Очень поможет, если кто-нибуль видео инструкцию по сборке и настройке выложит.
Спасибо.
P.S. Пока решил остановить свой выбор на NAZA FC
Если кто уже собирал ECILOP Easy Поделитесь своим опытом плиз. С какими трудностями сталкивались. Очень поможет, если кто-нибуль видео инструкцию по сборке и настройке выложит.
Видео от Алексея о том как naza не очень хорошо отрабатывает управление подвесом есть в этой ветке. Сам ломаю голову какой контроллер ставить, есть CRIUS AIO PRO и Rabbit у каждого есть плюсы и минусы
По сборке - неторопливо собирается за 2 вечера, инструкция с картинками довольно подробная, проблем не возникает
Есть некоторые мысли-сомнения, поделюсь:
регули паять на 3.5мм коннекторах или сразу пайка без коннекторов? Минус пайки - если поменять полетный контроллер на ARDUPILOT то направление вращения движков другое, + ремонтопригодность в поле снижается, не получится запасной луч быстро поставить
Ну опосля видео Алексея, кетайцы же прошивку назовскую поправили в части подвеса! Сам пока не пробовал но должно вроде лучше работать
А по поводу видео обучающего-ну Вы блин даете, на сайте Алексея настолько подробный мануал с фотками, по которому я не то что собрать смог, я ваще склонировал Эцилопа с нуля 😃 😃 😃
я ваще склонировал Эцилопа с нуля
А пружинки с чего взять???
Пружинки у Алексея купить как вариант или пройтись по автозапчастям
Пружинки у Алексея купить как вариант или пройтись по автозапчастям
Начиная работы я заказал из Польши большой набор разных пружин. Теперь их там в продаже нет, но наверняка где-то есть. Если вы делаете что-то новое, то параметры пружины можно расчитать исходя из максимальной силы сервомеханизма. А постоянное напряжение можно изменять за счет растяжения - подстраивайте расстояние между качалками.
А пружинки с чего взять???
А вы из какого города?
Я не посещаю Литовские форумы, видимо, по-этому встречаемся тут. Но готов помочь соседу.
Алексей, есть ли в Ваших планах сделать быстро сборно-разборную версию Ecilop Easy по типу DJI Spreading Wings S800?
Чтобы можно было взять с собой в турпоездку в дальнее зарубежье чемоданчик с коптером и на месте его собрать минут за 10-15.
Алексей, есть ли в Ваших планах сделать быстро сборно-разборную версию Ecilop Easy по типу DJI Spreading Wings S800?
Чтобы можно было взять с собой в турпоездку в дальнее зарубежье чемоданчик с коптером и на месте его собрать минут за 10-15.
А зачем разбирать конструкцию? Достал, установил пропы, аккумулятор, предполетная подготовка и в полет. 100 секунд. Именно в этот момент у меня сидит замерщик и обмеряет Эцилопа со всех сторон, будет делать чумаданчик. фурнитурка www.adamhall.com/en/Flightcase_Material.html О результатах сообщу фотоотчетом.
будет делать чумаданчик
И каких размеров получается чемоданчик?
В самолете, как ручная кладь пройдет?