SteadiСopter

да пока нечем хвастаться… подвес еще требует настройки, а видео обработки
Ножки портят всю малину) Легче с руки запускать
Запускать не проблема, попробуй на руку посадить чтоб подвес не сломать)
С рук запускать-правила плохого тона, учитель у вас плохой был 😃 😃 😃
Ножки портят всю малину) Легче с руки запускать
чьи ножки и какую малину?
а, да, кстати -и ноги у тебя кривые 😃 бугага
Косые не дремлют! Что говорит о жизнеспособности и популярности разработки Алексея!
Еще один клон/вариация на тему Эцилопа
Zero-steadicam
www.rcgroups.com/forums/showthread.php?t=1709184
UPD И это не просто какиенить абстрактные кетайцы, это между прочим ZeroUav, прямые заклятые конкуренты DJI !!!
Я надеюсь что роялти они автору прислать догадаются 😃
Оживлю-ка я темку, на днях произвел некоторую хирургию, поставил новые моторки 4006В 530кв пропами 14х4,7, ну и заодно брутальности поубирал немного 😉


“планер” в чистом виде без подвеса провисел вчера 23,5 мин на батарем 4200мАч (для меня рекорд пока)
Не хотел влезать, но уж больно тема вкусная…
У меня похожая система демфирования подвеса была в первой инкарнации примерно полтора года назад. С тех пор этих инкарнаций сменилось штук 15. К сожалению, из-за фиговых компонентов (бедность, что поделаешь…) не могу пока добиться приемлемой точности.
Идея очень замечательная, но если простят наглость, хотел бы указать на недостаток, который вижу… Это касается только тех случаев, когда камерой требуется шевелить в полете. Тогда качество стабилизации будет зависеть от угла наклона. В зависимости от того, куда камера направлена больше (вперед или вниз), изменяется длина плечей по передне-задней оси, что сбивает и/или усложняет регулировку стабилизации крена. Плюс, когда подвес не строго вертикален, рысканье вызывает центробежный эффект – поднятие плеча с камерой и опускание плеча с батареей, подвес стремится принять горизонтальное положение.
Я в своей конструкции использую еще третью серву, которая изменяет угол самой камеры, т.е. она может управляться независимо от подвеса. Сам подвес остается в одном (вертикальном) положении, и это положительно сказывается на стабилизации. В особо тепличных условиях (зависание при отсутствии ветра), можно управлять и самим подвесом – тогда камера может описывать угол >200 градусов – можно, например, посмотреть вверх и полюбоваться пропеллерами, а можно, наклонив подвес вперед, посмотреть объективом строго назад, правда, картинка будет вверх ногами 😃
Жень, в случае с третьей сервой как у тебя, балланс при наклоне камеры меняется и вся система в выходит из своего уравновешенного положения, это если у тебя камера наклоняется неотносительно собственного центра масс
Жень, в случае с третьей сервой как у тебя, балланс при наклоне камеры меняется и вся система в выходит из своего уравновешенного положения, это если у тебя камера наклоняется неотносительно собственного центра масс
У меня таки действительно камера отклоняется вокруг собственного центра массы, общий баланс подвеса остается без изменений. Не спрашивай, как я искал этот центр и с какой дрожью просверливал дырки для крепления… Впрочем, потом я придумал регулируемое в трех измерениях крепление. Регулировать его тоже морока еще та, но делается это один раз, и ошибку можно поправить, если что 😃
“планер” в чистом виде без подвеса провисел вчера 23,5 мин на батарем 4200мАч (для меня рекорд пока)
хороший результат! мой планер с 4с5000 висел около 25 мин, правда моторы 2814 и пропы 12х3.8
а с полной нагрузкой полетное время 9-9.5 мин
Piranha Дмитрий, а такой винт 14х4.7 не слишком для моторов?
Идея очень замечательная, но если простят наглость, хотел бы указать на недостаток, который вижу… Это касается только тех случаев, когда камерой требуется шевелить в полете. Тогда качество стабилизации будет зависеть от угла наклона. В зависимости от того, куда камера направлена больше (вперед или вниз), изменяется длина плечей по передне-задней оси, что сбивает и/или усложняет регулировку стабилизации крена. Плюс, когда подвес не строго вертикален, рысканье вызывает центробежный эффект – поднятие плеча с камерой и опускание плеча с батареей, подвес стремится принять горизонтальное положение.
Я в своей конструкции использую еще третью серву, которая изменяет угол самой камеры, т.е. она может управляться независимо от подвеса. Сам подвес остается в одном (вертикальном) положении, и это положительно сказывается на стабилизации. В особо тепличных условиях (зависание при отсутствии ветра), можно управлять и самим подвесом – тогда камера может описывать угол >200 градусов – можно, например, посмотреть вверх и полюбоваться пропеллерами, а можно, наклонив подвес вперед, посмотреть объективом строго назад, правда, картинка будет вверх ногами 😃
Я тоже начинал с четырехосного варианта в 2010 году. Идея верная.
Не зря теперяшний вариант называется EASY - это упрощенная конструкция.
Но, как показывает практика, угловые скорости слишком малы, что бы центробежная сила проявлялась наглядно.
Кроме того, по примеру Ecilop-2 видно, что система хорошо работает без длинного коромысла. Правда, там довольно тяжелый блок вращается, до 3 кг.
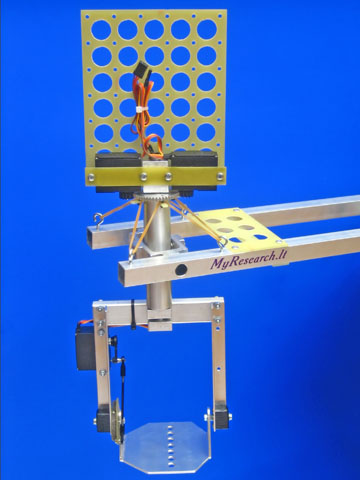

Ну вот и добрались руки сфотать то что вышло у меня! Спасибо Алексею за его мегаразработку и отличные фотки мануала по сборке, очень помогли в клонировании 😃
Какое растояние по диагонале между маторами получилось?
Думаю, будет уместно написать еще раз о значении наименований и сути новизны.
Сдесь использован термин «стэдикам». Это ошибка. Под брендом Стэдикам сегодня продаются самые разные крепления для камеры. Однако запатентованное изобретение «Стэдикам» – это рычаги с пружинами, которые переносят вес камеры на туловище человека. На мультикоптере нет человеческого тела и нет рычагов с пружинами. Поэтому термин «стэдикам» является привычным, но не корректным. Пример запатентованного элемента «стэдикам» на изображении:

Автором «стэдикам» является Garrett Brown. Изображение из его патента:
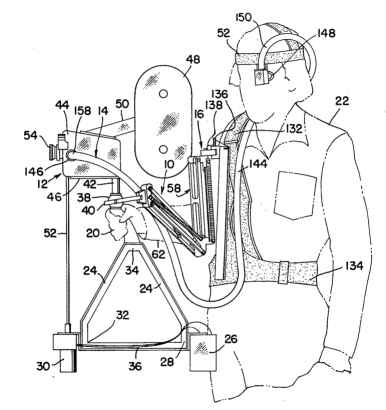
Garrett Brown является автором ряда патентов, где изображена камера с противовесом, но объектом изобретения являются только дополнительные элементы, а не сам принцип стабилизации.
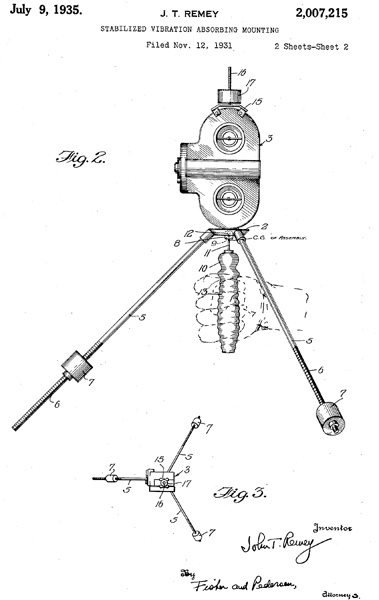
Этот принцип стабилизации был известен задолго до «Стэдикам». На изображении патент на изобретение 1931 года, здесь объектом изобретения является именно система с противовесами:
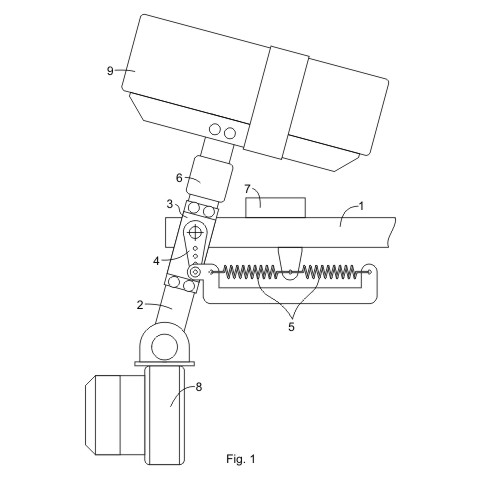
Запатентованной особенностью аппаратов ECILOP является способ вращения камеры с использованием пружин на сервоприводе и наличие гироскопа для предотвращения раскачивания:
В дополнении небольшой список линков на видео с борта:
Косые не дремлют!
Еще один клон/вариация на тему Эцилопа
Zero-steadicam
И это не просто какиенить абстрактные кетайцы, это между прочим ZeroUav, прямые заклятые конкуренты DJI !!!
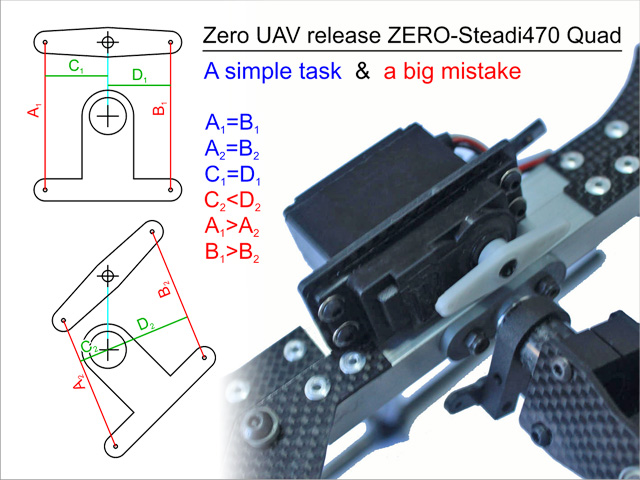
Не откажу себе в удовольствии потролить косых 😃
Картинка на английском, но суть должна быть ясна. У этого аппарата невозможен нормальный наклон подвеса:
Это не единственная проблема, кое о чем уже писалось ранее, например - проблема функционирования наклоненного гироскопа, так как они используют сенсоры разных плоскостей в одной коробочке.
Вот такие объяснения тому, что на демонстрациях Zero в действительности использован другой аппарат:
Zero-Steadi470–Test video: v.youku.com/v_show/id_XNDU3MDgwNjQw.html
Тень от Ecilop:

Всем доброй ночи!
На данный момент подыскиваю себе квадрокоптер для видеосъемок. Изначально рассматривал Xaircraft X650V, но натолкнувшись на Ecilop стал задумываться о приобритении сего аппарата. Т.к. на сайте производителя нет возможности приобрести RTF KIT, то я решил подсчитать во сколько этот аппарат обойдется. Прикрепляю свои расчеты в таблице с ссылками откуда брались цены. В расчет не включен передатчик и приемник (на начальном этапе планирую использовать turnigy 9X), а также стоимость доставки.
Буду признателен, если кто поможет советом. Все ли я учел в расчетах? Возможно есть др., более дешевые магазины.
Всем доброй ночи!
На данный момент подыскиваю себе квадрокоптер для видеосъемок. Изначально рассматривал Xaircraft X650V, но натолкнувшись на Ecilop стал задумываться о приобритении сего аппарата. Т.к. на сайте производителя нет возможности приобрести RTF KIT, то я решил подсчитать во сколько этот аппарат обойдется. Прикрепляю свои расчеты в таблице с ссылками откуда брались цены. В расчет не включен передатчик и приемник (на начальном этапе планирую использовать turnigy 9X), а также стоимость доставки.
Буду признателен, если кто поможет советом. Все ли я учел в расчетах? Возможно есть др., более дешевые магазины.
Два полетных контроллера точно не требуется.
Собственно, комплектация отличается от любого другого квадрокоптера со стабилизируемой камерой - наличием двух дополнительных гироскопов.
Бюджетные варианты гироскопов - HK401B - по 11 долларов (этот вариант не поддерживает ВЧ ШИМ, но с NAZA и MK работает).
RTF версию мы предложим скоро, но это будет комплект для тех, у кого денег на много больше, чем времени и знания.
Так что для тех, кто читает этот форум, наиболее разумным будет самостоятельно собирать аппарат. Тем более, что рано или поздно его все равно придется чинить.
коллеги, подскажите какой частоты PWM сигнал на выходе на gimball мозгов CRIUS All In One Pro v1?
Собираюсь ставить эту плату на Ecilop, там дополнительные гиры втыкаются в выход gimball перед сервами подвеса и есть информация что некоторые дешевые гиры, например 401-я, не понимают высокочастотный PWM ( ШИМ) сигнал. Может частота как-то регулируется прошивкой или она жестко забита в железе?