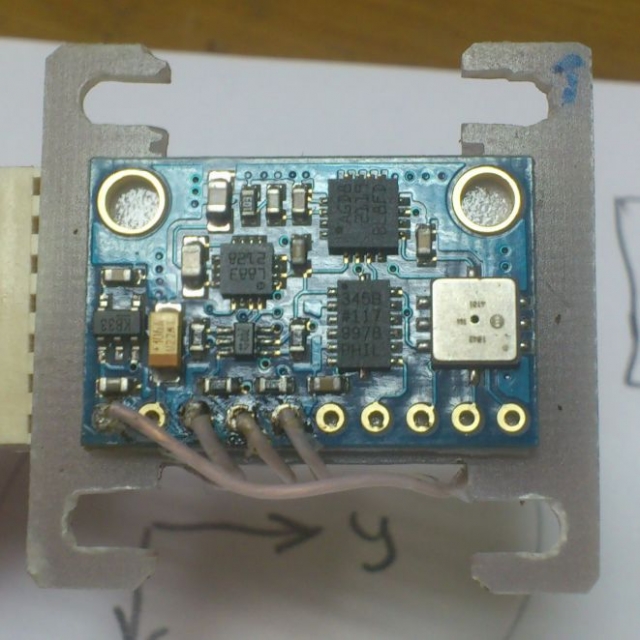
10DOF L3G4200D+ADXL345+HMC5883L+BMP085 Nine Axis IMU Module
10DOF L3G4200D+ADXL345+HMC5883L+BMP085 Nine Axis IMU Module
10DOF L3G4200D+ADXL345+HMC5883L+BMP085 Nine Axis IMU Module
Примострелся к видео. Возможно я с глазами не дружу но в самом начале при вовороте на право у гироскопа сильно менятся питч а у акселя ролл. Ведь так быть не должно?
Chester_kz
Примострелся к видео. Возможно я с глазами не дружу но в самом начале при вовороте на право у гироскопа сильно менятся питч а у акселя ролл. Ведь так быть не должно?
да по мне так вообще не должно быть как на видео 😃
Да дело не в дачиках а в том как их на плату припояли. А ориентацию всегда можно поменять в прошивке. Как я и писал добейтесь, сменой ориентации, того чтобы при повороте лево право менялось тока ролл и гиры и акселя. Муторное дело но сделать можно.
судя по видео
поменять местами оси в код
посмотреть на поведение датчиков после этого
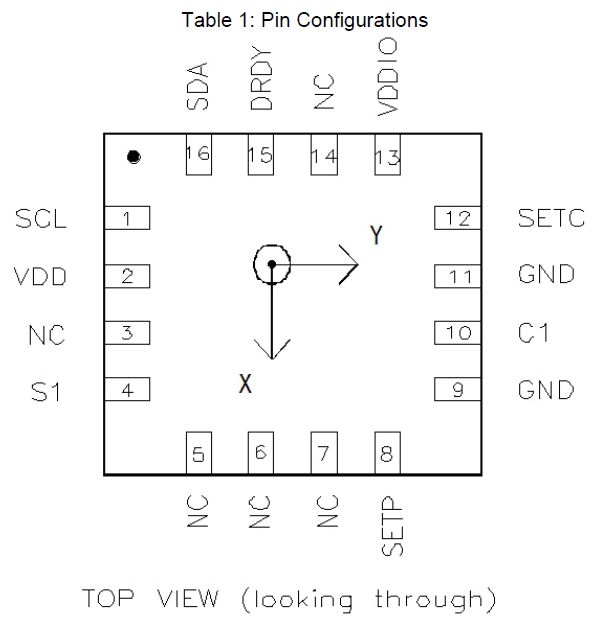
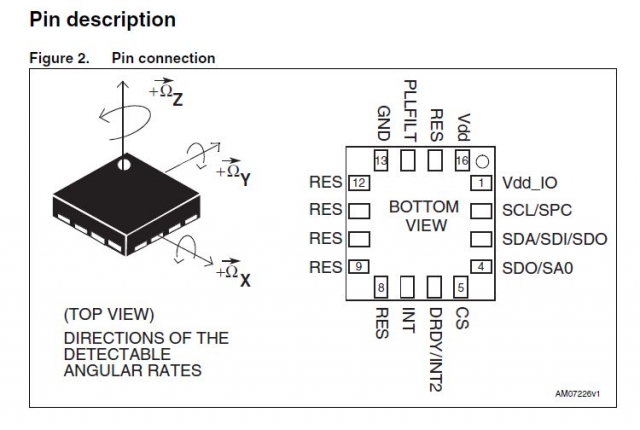
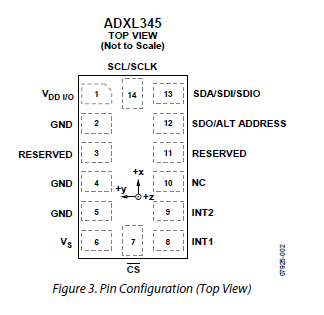
Как должны быть ориентированы оси датчиков
MAG_ROLL, ACC_ROLL и GYRO_ROLL растут
MAG_Z и ACC_Z уменьшаются
Наклоните коптер вперед (хвост вверх):
MAG_PITCH, ACC_PITCH и GYRO_PITCH растут
MAG_Z и ACC_Z уменьшаются
Вращайте коптер по часовой стрелке (YAW):
Коптер стоит на месте (горизонтально):
MAG_Z положительное ; ACC_Z положительное
SovGVD
посмотреть на поведение датчиков после этого
не разобрать показания при наклоне, скачет безбожно
по даташиту все датчики нормально стоят
компас
гиры
аксель
sulaex
по даташиту все датчики нормально стоят
забудте про даташит и кто и как стоит
поменяйте оси датчиков в прошивке
Для 1.9 :
#define ACC_ORIENTATION(X, Y, Z) {accADC[ROLL] = X; accADC[PITCH] = -Y; accADC[YAW] = Z;}
#define GYRO_ORIENTATION(X, Y, Z) {gyroADC[ROLL] = X; gyroADC[PITCH] = Y; gyroADC[YAW] = Z;}
#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = -X; magADC[PITCH] = -Y; magADC[YAW] = Z;}
#define ADXL345_ADDRESS 0xA6
всем спасибо, настроил на 2.0 :
//if you want to change to orientation of individual sensor
#define ADXL345_ADDRESS 0xA6
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"4d4325cb3df9550077756c92":{"_id":"4d4325cb3df9550077756c92","hid":79585,"name":"SovGVD","nick":"SovGVD","avatar_id":null,"css":""},"4e0330223df955007775116f":{"_id":"4e0330223df955007775116f","hid":91496,"name":"sulaex","nick":"sulaex","avatar_id":null,"css":""},"4e11f85c3df9550077750bfd":{"_id":"4e11f85c3df9550077750bfd","hid":92547,"name":"RA4ASN","nick":"RA4ASN","avatar_id":null,"css":""},"4e815cb23df955007774ddce":{"_id":"4e815cb23df955007774ddce","hid":100598,"name":"Chester_kz","nick":"Chester_kz","avatar_id":null,"css":""}},"settings":{"can_see_ip":false,"can_report_abuse":false,"can_see_hellbanned":false,"forum_can_view":true,"forum_can_reply":false,"forum_edit_max_time":30,"forum_can_close_topic":false,"forum_show_ignored":false,"forum_mod_can_delete_topics":false,"forum_mod_can_hard_delete_topics":false,"forum_mod_can_see_hard_deleted_topics":false,"forum_mod_can_edit_posts":false,"forum_mod_can_pin_topic":false,"forum_mod_can_edit_titles":false,"forum_mod_can_close_topic":false,"can_vote":false,"forum_mod_can_add_infractions":false,"forum_topic_title_min_length":10,"forum_reply_old_post_threshold":30,"votes_add_max_time":168,"forum_show_post_interval":7,"can_see_deleted_users":false},"section":{"_id":"61c9a54c3df9550077bb51e0","hid":123,"title":"Коптеры. Комплектующие, сборка, настройка.","parent":"61c9a54c3df9550077bb51fe","description":"","is_category":false,"is_votable":true,"is_writable":true,"cache":{"topic_count":1142,"post_count":370881,"last_post":"68eaaf32eede43b1c479d52a","last_topic":"68e1775300fb687e16f33657","last_topic_hid":572658,"last_topic_title":"SpeedyBee F405 V3 Барометр","last_ts":"2025-10-11T19:25:38.659Z","last_user":"68dbe48444153b38659b4133"}},"topic":{"_id":"4fbc96643df95500773678d6","hid":279504,"title":"10DOF L3G4200D+ADXL345+HMC5883L+BMP085 Nine Axis IMU Module","views_count":3802,"last_post_counter":12,"cache":{"post_count":12,"first_post":"4fbc96643df9550077367faf","first_ts":"2012-05-23T07:48:52.000Z","first_user":"4e0330223df955007775116f","last_post":"4fbcbe483df9550077367fc5","last_post_hid":12,"last_ts":"2012-05-23T10:39:04.000Z","last_user":"4e0330223df955007775116f"},"st":1,"section":"61c9a54c3df9550077bb51e0"},"subscription":null,"pagination":{"total":12,"per_page":25,"chunk_offset":4},"posts_list_before_post":["paginator","datediff"]},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}