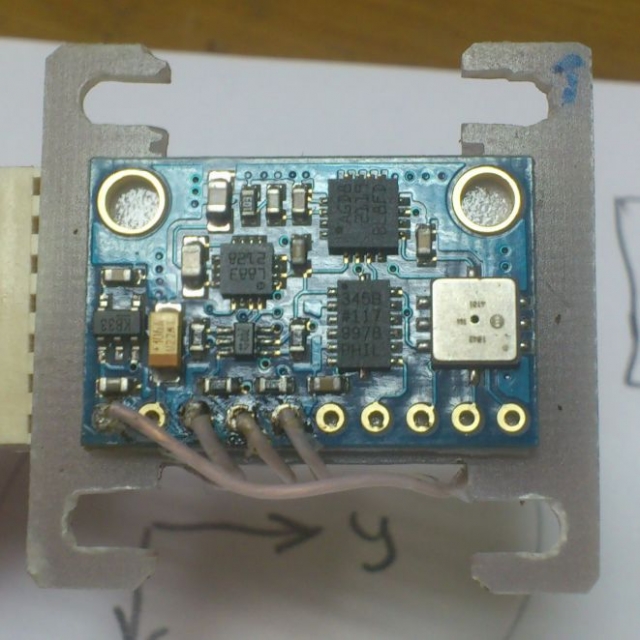
10DOF L3G4200D+ADXL345+HMC5883L+BMP085 Nine Axis IMU Module

народ, помогите, моск в разнос уже пошел %)

купил датчики
www.goodluckbuy.com/index.php?target=products&prod…
допер только до того, что бы акселю адрес сменить (при условии в конфиге прописывания каждого датчика по отдельности, какую конфигурацию/название платы выставлять, я так и не допер)
кто подключил эту платку нормально, разжуйте пожалуйста, что где править для нормальной работы оного девайса?
у меня уровень на картинке при наклонах постоянно выравнивается в горизонт, хотя плата стоит под наклоном.
по форуму рылся, но в этих дебрях только и всего, что нашел про смену адреса акселя, да и калибровку компаса
По опыту MultiWii. У меня было что уроверь выравнивался в горизонт при наклоне когда не совпадали оси гироскопа и акселя. По гуи настраивал чтоб при повороте в ту или иную сторону значения по осям совпадали в том числе и инкремент декримент.
Под чем настраиваите? Мультиви пират или что?
Да, и чего не работает то как надо, распиши.
По опыту MultiWii. У меня было что уроверь выравнивался в горизонт при наклоне когда не совпадали оси гироскопа и акселя. По гуи настраивал чтоб при повороте в ту или иную сторону значения по осям совпадали в том числе и инкремент декримент.
Под чем настраиваите? Мультиви пират или что?
да, я то же с этим сталкивался (да же другим этот совет давал), датчики расположены правильно, ща еще раз подыму даташит и перепроверю
мультивий конфиг 20
Да, и чего не работает то как надо, распиши.
Примострелся к видео. Возможно я с глазами не дружу но в самом начале при вовороте на право у гироскопа сильно менятся питч а у акселя ролл. Ведь так быть не должно?
Примострелся к видео. Возможно я с глазами не дружу но в самом начале при вовороте на право у гироскопа сильно менятся питч а у акселя ролл. Ведь так быть не должно?
да по мне так вообще не должно быть как на видео 😃
задрипаные датчики с распила ито себя адекватней ведут, облетаны на ура…
Да дело не в дачиках а в том как их на плату припояли. А ориентацию всегда можно поменять в прошивке. Как я и писал добейтесь, сменой ориентации, того чтобы при повороте лево право менялось тока ролл и гиры и акселя. Муторное дело но сделать можно.
судя по видео
- поменять местами оси в код
- посмотреть на поведение датчиков после этого
Как должны быть ориентированы оси датчиков
Чтобы определить корректность расположения осей датчиков проделайте следующее:
Наклоните коптер вправо (левая сторона вверх):
- MAG_ROLL, ACC_ROLL и GYRO_ROLL растут
- MAG_Z и ACC_Z уменьшаются
Наклоните коптер вперед (хвост вверх):
- MAG_PITCH, ACC_PITCH и GYRO_PITCH растут
- MAG_Z и ACC_Z уменьшаются
Вращайте коптер по часовой стрелке (YAW):
- GYRO_YAW растет
Коптер стоит на месте (горизонтально):
- MAG_Z положительное ; ACC_Z положительное
- посмотреть на поведение датчиков после этого
не разобрать показания при наклоне, скачет безбожно
по даташиту все датчики нормально стоят
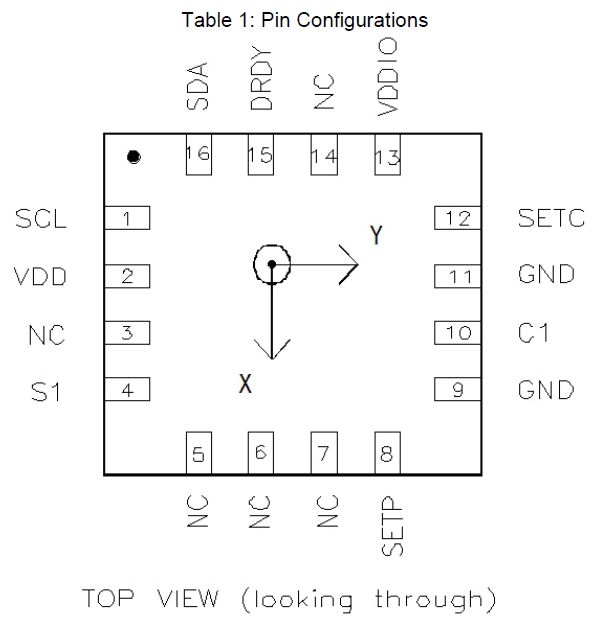
компас
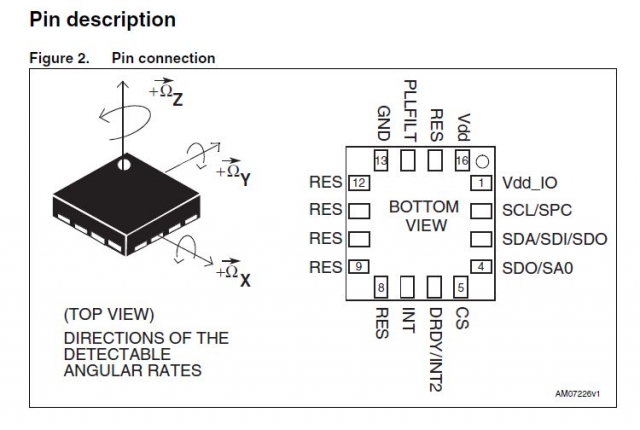
гиры
аксель
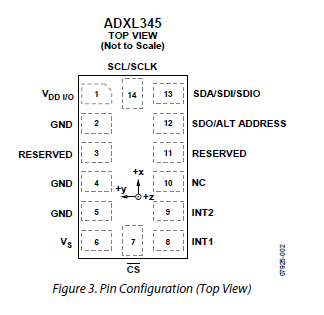
по даташиту все датчики нормально стоят
забудте про даташит и кто и как стоит
- поменяйте оси датчиков в прошивке
запишите еще раз видео, посмотрим
#define ACC_ORIENTATION(X, Y, Z) {accADC[ROLL] = X; accADC[PITCH] = -Y; accADC[YAW] = Z;}
#define GYRO_ORIENTATION(X, Y, Z) {gyroADC[ROLL] = X; gyroADC[PITCH] = Y; gyroADC[YAW] = Z;}
#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = -X; magADC[PITCH] = -Y; magADC[YAW] = Z;}
#define ADXL345_ADDRESS 0xA6
всем спасибо, настроил на 2.0:
//if you want to change to orientation of individual sensor
#define ACC_ORIENTATION(X, Y, Z) {accADC[ROLL] = Y; accADC[PITCH] = -X; accADC[YAW] = Z;}
#define GYRO_ORIENTATION(X, Y, Z) {gyroADC[ROLL] = X; gyroADC[PITCH] = Y; gyroADC[YAW] = -Z;}
#define MAG_ORIENTATION(X, Y, Z) {magADC[ROLL] = -Y; magADC[PITCH] = X; magADC[YAW] = -Z;}
#define ADXL345_ADDRESS 0xA6