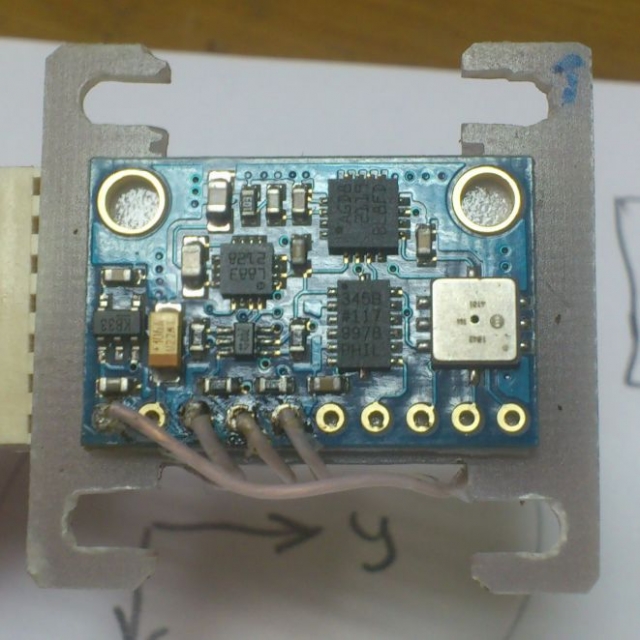
10DOF L3G4200D+ADXL345+HMC5883L+BMP085 Nine Axis IMU Module
По опыту MultiWii. У меня было что уроверь выравнивался в горизонт при наклоне когда не совпадали оси гироскопа и акселя. По гуи настраивал чтоб при повороте в ту или иную сторону значения по осям совпадали в том числе и инкремент декримент.
Под чем настраиваите? Мультиви пират или что?
да, я то же с этим сталкивался (да же другим этот совет давал), датчики расположены правильно, ща еще раз подыму даташит и перепроверю
мультивий конфиг 20
Примострелся к видео. Возможно я с глазами не дружу но в самом начале при вовороте на право у гироскопа сильно менятся питч а у акселя ролл. Ведь так быть не должно?
Примострелся к видео. Возможно я с глазами не дружу но в самом начале при вовороте на право у гироскопа сильно менятся питч а у акселя ролл. Ведь так быть не должно?
да по мне так вообще не должно быть как на видео 😃
задрипаные датчики с распила ито себя адекватней ведут, облетаны на ура…
Да дело не в дачиках а в том как их на плату припояли. А ориентацию всегда можно поменять в прошивке. Как я и писал добейтесь, сменой ориентации, того чтобы при повороте лево право менялось тока ролл и гиры и акселя. Муторное дело но сделать можно.
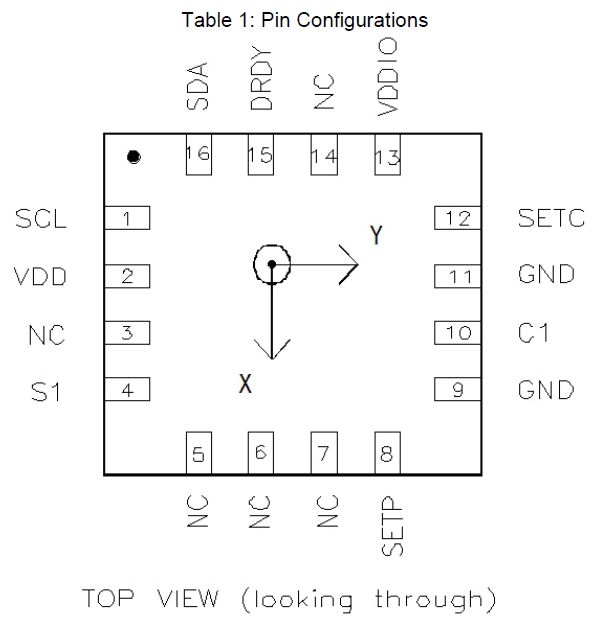
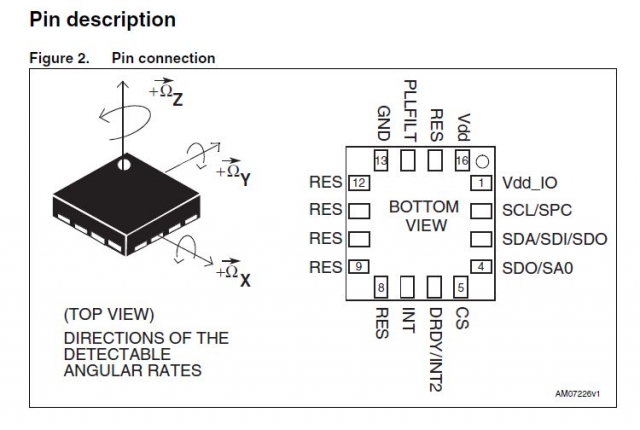
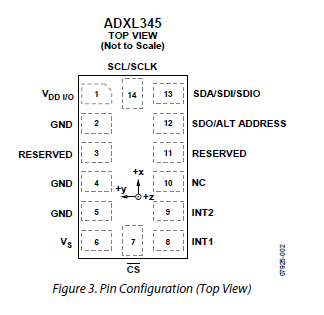
Как должны быть ориентированы оси датчиков
Чтобы определить корректность расположения осей датчиков проделайте следующее:
Наклоните коптер вправо (левая сторона вверх):
MAG_ROLL, ACC_ROLL и GYRO_ROLL растут
MAG_Z и ACC_Z уменьшаются
Наклоните коптер вперед (хвост вверх):
MAG_PITCH, ACC_PITCH и GYRO_PITCH растут
MAG_Z и ACC_Z уменьшаются
Вращайте коптер по часовой стрелке (YAW):
GYRO_YAW растет
Коптер стоит на месте (горизонтально):
MAG_Z положительное ; ACC_Z положительное
посмотреть на поведение датчиков после этого
не разобрать показания при наклоне, скачет безбожно