Добрый, подскажите плс
Что нужно настроить чтоб подвес переориентировать вот в такую работу?
Прошу прощение если вопрос уже задавался (тему читаю на 30-й странице) Интересует распиновка разъема USB шнурка, купил подвес с рук, а в комплекте его не было. Как я понимаю что там стандартный преобразователь USB-UART на микросхеме PL2303.
всем привет, поиском не нашел, как на этот подвес поставить мобиус или ранкам в родном корпусе?
В итоге поставил го-про образную камеру, следующий вопрос:
тарот стоит на первом фантоме, подключен через назу, угол наклона выведен на крутилку. Меня не устраивает, что подвес реагирует на крутилку как на стик (крутилка не задает конечные точки, а направление и скорость поворота). И еще одна проблема, после пролетов вперед-назад сбивается угол наклона подвеса. Что крутить и где (в назе или в настройке подвеса)
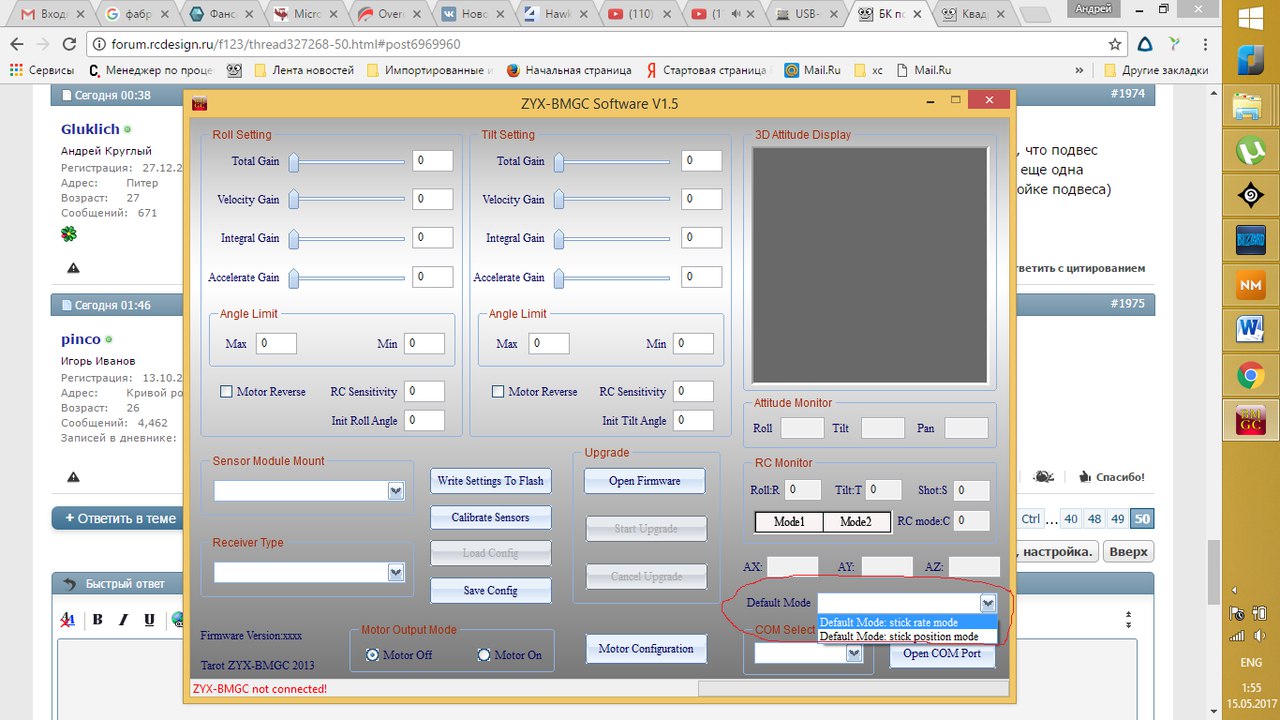
В настройке подвеса есть два режима управления: скорость поворота и угол поворота
В настройке подвеса есть два режима управления: скорость поворота и угол поворота
это оно?
Да, это оно
да
поменял режим, теперь с типом управления все ок.
Появилась новая проблема - допустим, подвес опущен на 10*, качаю коптер вперед - подвес отрабатывает чуть-чуть и идет вниз с коптером, сохраняет угол к коптеру. Если отклонять назад, то вроде подвес отрабатывает нормально
поменял режим, теперь с типом управления все ок.
Появилась новая проблема - допустим, подвес опущен на 10*, качаю коптер вперед - подвес отрабатывает чуть-чуть и идет вниз с коптером, сохраняет угол к коптеру. Если отклонять назад, то вроде подвес отрабатывает нормально
я так и не решил эту проблему с назой ., если бы был выход не с назы а приемыша - проблема решилась бы сама но у меня фант и на нем протокол по моему sbus не помню 2 года назад парился и забил!
мое решение было рс сенсивити по тилу увеличить в разы, и подвес намного дольше думает, за это время успеваю откорректировать угол
там в ассистенте назы есть настройки подвеса, который подключается через назу к приемнику
пробовали ими поиграться?
там в ассистенте назы есть настройки подвеса, который подключается через назу к приемнику
пробовали ими поиграться?
с таротом почему то не активный был
Здравствуйте. Нужна помощь. Никак не могу подключить к компу. Версия ПО 1.5. виндовс 10. Запускаю программу делает пару попыток подключения и прогу выбивает в завершение работы. Пробовал на другом компе с ХР зависает и очень долго молчит. подключал все по инструкции.
там в ассистенте назы есть настройки подвеса, который подключается через назу к приемнику
пробовали ими поиграться?
у меня и там и там вроде все активно, что крутить?
Второй день мучаюсь. Никак не получается подключить к программе. Перепробовал качу драйверов, сегодня смог подключиться только к мотору. В чем причина не могу понять. Толкните в нужном направлении. Сам подвес работает хорошо, но нужно переключить на моде 2.
Второй день мучаюсь. Никак не получается подключить к программе. Перепробовал качу драйверов, сегодня смог подключиться только к мотору. В чем причина не могу понять. Толкните в нужном направлении. Сам подвес работает хорошо, но нужно переключить на моде 2.
Если долго мучатся то что-нибудь получиться. Получилось победить подвес.
подскажите пожалуйста, как определить неисправность подвеса?
после падения при включении горит красный светодиод, подвес ни на что не реагирует, подключение к компу не происходит (софтина его не видит).
Ищу мануал на русском для tarot t2-2d.
Всем привет. Ребята, ткните носом, где почитать. При падении погнулась ось моторе Roll, Tarot T2D, как снять движок с подвеса. Открутил все винтики, дальше, что делать?
Всем привет! Не откажите в помощи) Проблема с настройкой наклона подвеса.
Собственно хочу узнать возможно ли подключение к самому процессору pixhawk 2.4.8 как на картинке.Тут есть инструкция, нужнжо скачать файл, как я понял настойки самого подвеса, но ссылка на него не работает.ardupilot.org/copter/…/common-tarot-gimbal.html Приемник подключен через PPM Енкодер, возможен ли при этом вариант подключения на прямую, через канал приемника? Или может быть у кого то есть этот файл настроек. Спасибо!
We use cookies and web analytics services. By continuing to use our
website, you consent to the use of cookies or similar technologies on
this website, including third-party statistics and web analytics services,
which may in some cases collect and process information about your visit
and activity. To find out more, see rules of this website.