Система автоматического тестирования ВМГ (народный проект)

Никакой проблемы на самом деле нет. 10 бит в нашем случае более чем достаточно. Точность измерения составляет 0,1%. Скажем, в диапазоне 0…5кг точность будет плюс-минус 5 грамм. Причем, скорость измерения высокая не требуется, поэтому точность можно повысить многократными измерениями.
вы не учли шумы внутреннего АЦП, а при использовании фильтра уменьшается точность, если делать несколько замеров, падает скорость теста
к тому же микросхема внешнего АЦП стоит столько же, сколько и усилитель для тензодатчика, но при этом точность замера с тензодатчика возрастает на много больше
а что с этой установкой? RThrust - система автоматического тестирования ВМГ вроде тожесамое - единственное что она “закрытая”, а тут будет открытая?
вы не учли шумы внутреннего АЦП, а при использовании фильтра уменьшается точность, если делать несколько замеров, падает скорость теста
Шумы легко фильтруются программным фильтром, а скорость работы внутреннего АЦП на несколько порядков выше, чем требуется для данной задачи.
к тому же микросхема внешнего АЦП стоит столько же, сколько и усилитель для тензодатчика
Подходящий усилитель можно сделать из того, что есть под рукой, а микросхему АЦП в ближайшем магазине можно и не найти.
а что с этой установкой? RThrust - система автоматического тестирования ВМГ вроде тожесамое - единственное что она “закрытая”, а тут будет открытая?
то же самое, только на чипе smt32, но уж слишком затянут проект под предлогом доведения до ума
данный проект будет открытым, не вижу смысла в закрытии подобных разработок, ведь чем больше народу повторит его, тем больше пользы будет получено в конечном результате
Шумы легко фильтруются программным фильтром, а скорость работы внутреннего АЦП на несколько порядков выше, чем требуется для данной задачи.
Подходящий усилитель можно сделать из того, что есть под рукой, а микросхему АЦП в ближайшем магазине можно и не найти.
на практике знаю возникающие сложности в процессе разработки в данном направлении
имеете реальное предложение, схемы, коды, решения, милости просим, иначе, проходите мимо
по поводу шумов и легкости фильтрации, хотелось бы взглянуть пример вашей легкости решения проблемы
про скорость АЦП, полагаю вы ошиблись в термине, да и не в теме того, что имелось в виду в моем сообщении
ну и на по следок, усилитель, который с легкостью собирается из подручного хлама глянуть бы
подбор делителя на шесть банок с запасом

пример подбора датчик тока для наших целей
в моем распоряжении имеется датчик ACS758ECB-200B
если мы откроем даташит к этому датчику и посмотрим его данные,
то увидим крайнюю не пригодность данного датчика для наших потребностей,
но на данный момент делать нечего, я буду использовать его.
для правильного подбора датчика требуется воспользоваться таблицей с даташита, посмотрим ее

предположим, что замер тока нашего стенда не будет превышать 50А
датчик тока в моем распоряжении в нулевом состоянии выдает половину опорного напряжения
то есть при нулевом значении АЦП будет выдавать значение 512
причем точность показаний будет 10мВ на 1А - это самое не подходящее значение
для наших целей лучшим датчиком будет ACS758LCB-050U
этот датчик измеряет до 50А с точностью 60мВ/1А, самый точный из ACS758 для наших целей
точность в 6 раз выше используемого мною
обращайте внимание на буковку U в маркировке датчика, этот датчик меряет ток в одном направлении
тем самым точность повышается в два раза
ЗЫ выше описанное является моим пониманием прочтенного, на достоверность не претендую
если есть замечания или исправления, прошу поправить
сейчас полез на Али смотреть тензодатчики … первое что бросилосЪ в глаза - куча недорогих готовых модулей АЦП изначально заточеных под тензодатчик - hx711 … ИМХО поддержка таких модулей сильно облегчит повторение конструкции …
датчик имеет смысл брать именно на 10 кг или лучне на 5 ???
еще едут регули , китайская подделка ESC32 … если разобраться с протоколом то с них можно получать напряжение , ток и обороты … только нужен будет свободный компорт (проблему решает ардуина мега или леонардо ) …
тогда получается для стенда нужны будут только ардуина , регуль ESC32 , плата на hx711 и тензодатчик …
Спасибо Юрий за полезную информацию по модулю.
Отличное готовое решение для модульной сборки и дешевой комплектухи.
Именно то, что требуется для данного проекта и легкого повторения.
Имеется библиотека и пример чтения данных с этого модуля.
Обязательно закажу его и включу в качестве основного модуля в проект.
датчик имеет смысл брать именно на 10 кг или лучне на 5 ???
Зависит от ваших потребностей, если вы не собираетесь измерять ВМГ с тягой не превышающей пару килограмм, думаю достаточно тензодатчика и в 3 килограмма, точность измерений будет больше.
Чем больше будет значение, тем меньше будет точность, хотя для АЦП в 24 битта это не особо критично.
тогда получается для стенда нужны будут только ардуина , регуль ESC32 , плата на hx711 и тензодатчик …
пошел искать инфу по этим регулям
ЗЫ добавлено апосля
не, думаю нет смысла включать в проект данный регуль, слишком он дорогой
Формула для расчета значения тока датчика с двухсторонним измерением (буква B в маркировке)
I=(Count-CountNull)*(ISensor/512)
Формула для расчета значения тока датчика с односторонним измерением (буква U в маркировке)
I=Count*(ISensor/1024)
I - значение тока (результат)
Count - показания АЦП ардуины
CountNull - показания АЦП без нагрузки (нулевое значение тока)
ISensor - максимальный ток измеряемый датчиком (смотрите в таблице)
по поводу точности датчиков:
для датчика ACS758ECB-200B шаг измерения 200А/512=0.39 А (например для 20А значения всего 50 показаний, маловато)
для датчика ACS758LCB-050U шаг измерения 50А/1024=0.05 А (например для 20А значения 400 показаний, более чем достаточно)
ЗЫ заметка, надо будет завтра попробовать запитать схему стенда от аккумулятора через стабилизатор
добиться идеальных нулевых показаний АЦП путем стабилизации опорного напряжения, что бы исключить общую настройку стенда в целом
не, думаю нет смысла включать в проект данный регуль, слишком он дорогой
вы видимо смотрели оригинальную версию которую “из принципа” паяют в европе , ну и цена соответственно 39 евро …
я-же взял на Али подделки , 5 штук по $23,29 фришип , что для 40 амперных регулей вполне нормально …
как приедут , буду сравнивать их эффективность по сравнению с обычными , насколько стоит с ними связываться …
наброски кода, гляньте, поправьте если есть чего пожалуйста
прошу строго не судить, раньше в ардуину только заливал скетчи
тяга и ток калибруются в ноль при включении
напряжение и остальные калибровки будут позже
так как в программировании не особо понимаю
интерфейса пока не намечается, работа скетча будет заключаться
в прямой и обратной связи через терминал, аля DOS команды
если есть желающие, было бы не плохо получить помощь в создании интерфейса
//объявление переменных
//подключаемые разьемы на ардуине
int PWM = 3; //пин D3 для ШИМ
int DATA = 4; //пин D4 подключаем АЦП тяги
int SCLK = 5; //пин D5 подключаем АЦП тяги
int PWDN = 6; //пин D6 подключаем АЦП тяги
#define CurrPin A0 //пин A0 датчик тока
#define VoltPin A1 //пин A1 датчик напряжения
//переменные для работы
float CurrentValue = 0; //переменная для расчета тока (с плавающей точкой)
float CurrentValueRes = 0; //переменная с результатом для расчета тока (с плавающей точкой)
float VoltageValue = 0; //переменная для расчета напряжения (с плавающей точкой)
int32_t Weight = 0; //переменная для расчета тяги (32 разряда)
//переменные для нулевых значений
int32_t WeightNull = 0; //нулевое значение по весу (переменная калибруется при включении)
int CountNull = 0; //нулевое значение по току, данная переменная для однонаправленных датчиков ACS758 (с буквой U) не используется (переменная калибруется при включении)
//эти переменные заполняются пользователем
int ISensor = 200; //максимальное значение измеряемое датчиком (смотрим даташит по ним)
//инициализация
void setup() {
//инициализация I/O
pinMode(DATA, INPUT);
pinMode(SCLK, OUTPUT);
pinMode(PWDN, OUTPUT);
digitalWrite(PWDN, HIGH);
//скорость порта
Serial.begin(57600);
//читаем нулевые значения по весу и току
WeightNull = getSensorValueWeight();
CountNull = analogRead(CurrPin);
}
//чтение данных тяги
int32_t getSensorValueWeight() {
digitalWrite(SCLK, LOW); // wake up ADC
while (digitalRead(DATA) == HIGH); // wait for data ready, stay in while-loop until LOW
Weight = shiftIn(DATA, SCLK, MSBFIRST);
Weight <<= 8;
Weight |= shiftIn(DATA, SCLK, MSBFIRST);
Weight <<= 8;
Weight |= shiftIn(DATA, SCLK, MSBFIRST);
digitalWrite(SCLK, HIGH); // enter sleep mode
Weight = ((signed long) (Weight << 8)) >> 8; // process as int24_t (two's compliment 24bit)
return Weight;
}
//начало работы в цыкле
void loop() {
Weight = (getSensorValueWeight() - WeightNull)/204.6615;
//расчет данных напряжения
VoltageValue = analogRead(VoltPin); // считываем значение аналогового входа (напряжение)
VoltageValue = VoltageValue*0.0298217;
//расчет данных тока
CurrentValue = analogRead(CurrPin); // считываем значение аналогового входа (ток)
CurrentValueRes = (CurrentValue-CountNull)*ISensor/512; //формула расчета тока для двунаправленнх датчиков ACS758
//CurrentValueRes = CurrentValue*ISensor/1024; //формула расчета тока для однонаправленных датчиков ACS758
//выводим результат
Serial.print(Weight);
Serial.print("\t");
Serial.print(VoltageValue);
Serial.print("\t");
Serial.println(CurrentValueRes);
Serial.flush();
}
список линков для закупки комплектующих для создания стенда
как я и писал выше, цель проекта создание стенда для тестирования ВМГ как можно дешевле и проще в повторении
данный проект можно будет повторить в двух вариантах, модульный и одно-платный, а так же смешанном из этих вариантов
модульный является самым простым и доступным к повторению, одно-платный будет предоставлен позже и будет самым дешевым
список модулей (например):
Arduino Mini Pro

основой модульного проекта является плата с процессором, в качестве этой борды возможно использовать любой модуль или готовый контроллер на атмеге
например ардуины UNO, Pro Mini и т. д., так же можно использовать платки полетных контроллеров, Кук, МультиВий, в общем все, в чем имеется атмега (при желании можно и регуль переделать 😃)
линк - www.aliexpress.com/item/…/1242584516.html - 7$
по данному линку модуль продается с FTDI (следующий по списку, не надо будет отдельно покупать)
модуль FTDI
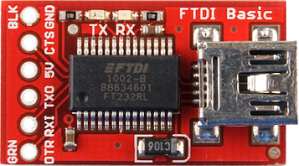
этот модуль для связи борды и компьютера, ниже в качестве примера привел модуль синезуба, но его так же придется настраивать если он еще не настроен, на худой конец при желании атмегу можно на прямую присобачить к компьютеру, если у него присутствует физический ком-порт, но не думаю, что приобретение модуля ФТДИ такая большая проблема, тем более, что этот модуль может уже присутствовать на полетных контроллерах или где нибудь валяться у вас в загаЖнике.
линк - www.aliexpress.com/wholesale?SearchText=ftdi&catId… - 7$
готовый модуль АЦП для снятия показаний с тензодатчика
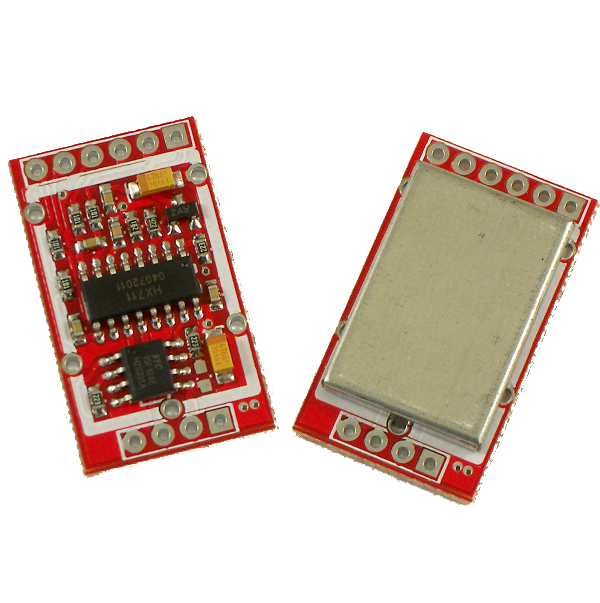
данный модуль организует снятие аналоговых данных с тензодатчика (датчик тяги, датчик веса) и преобразует эти данные в цифровой вид для последующей обработки на ардуине, именно подобный модуль сподвиг меня на поднятие данного проекта, так как разрядности АЦП ардуины было не достаточно для требуемых расчетов (спасибо Юрию за наводку)
линк - www.ebay.com/itm/400563601604 - 7$
датчик тяги

датчик тяги (веса), в большинстве случаев достаточно пяти колограммового, хотя и 10 кг совсем не сколечко не испортит нам данных
линк - www.aliexpress.com/item/…/1192555182.html - 10$
модуль датчика тока

выше в этой теме я уже расписал, какой датчик выбрать лучше
линк - www.ebay.com/itm/111040360152 - 18$
по линку очень дорогой модуль, можно найти на много дешевле
не требуется, но для удобства можно использовать синий зуб

с данным модулем будет удобнее работать и управлять стендом, можно будет установить стенд достаточно далеко и на безопасное расстояние, не обременяя себя кабелем связи
подробности подключения и настройки можно прочитать на этом же форуме в теме rcopen.com/forum/f123/topic261502
“летим птичка там много вкусного”
какая прелесть!? 😃
в поисках работы с ШИМ наткнулся на пример связи компьютера и ардуины посредством терминала, а так же среду разработки приложений очень похожую на ардуиновскую
кому интересно, вот линк
Среда эта называется Processing - на её основе как раз и сделана среда Arduino 😃
Среда эта называется Processing - на её основе как раз и сделана среда Arduino 😃
ага, догадался уже 😃
некоторые наработки аля DOS консоль и работа с ШИМ (пока без ремарок)
на видео показана возможность выбора режима теста и прерывание работы теста любой клавишей на случай возникновения аварийной ситуации,
прошу не ругаться за мой английский а поправить его
// добавляем библиотеку для работы с сервоприводами
#include <Servo.h>
// для дальнейшей работы назовем 9 пин как servoPin
#define servoPin 3
// 544 это стандартная длина импульса при котором сервопривод должен принять положение 0°
#define servoMinImp 544
// 2400 это эталонная длина импульса при котором сервопривод должен принять положение 180°
#define servoMaxImp 2400
Servo myServo;
int val; //здесь будет храниться принятый символ
int n;
int error = 0;
void setup()
{
myServo.attach(servoPin, servoMinImp, servoMaxImp);
// устанавливаем пин как вывод управления сервоприводом,
// а также для работы сервопривода непосредственно в диапазоне углов от 0 до 180° задаем мин и макс значения импульсов.
// импульсы с большей или меньшей длиной восприниматься не будут.
// для сервоприводов даже одной партии значения длин импульсов могут отличаться, может быть даже и 584-2440.
// поэкспериментируйте и найдите идеальные длины импульсов конкретно для вашего сервопривода.
Serial.begin(9600); //установка порта на скорость 9600 бит/сек
myServo.writeMicroseconds(set_pos(0));
}
//чтение вводимой строки из терминала
String readText(int n){
int i = 0;
String str;
while (i<n) {
while (!(Serial.available()));
val = Serial.read();
if (val==13){return str;}
Serial.print(char(val));
str += char(val);
i++;
}
return str;
}
// Функция устанавливает стик газа
int set_pos(int pos) {
int tmp=(servoMaxImp - servoMinImp) /100;
pos = servoMinImp + tmp * pos;
return pos;
}
void beginTest(){
Serial.println("\n\r============= Select action: =============");
Serial.println("1 - begin auto test 50, 65, 75, 85, 100%");
Serial.println("2 - begin auto test 1-100%");
Serial.println("3 - begin manual test");
Serial.println("any key - return to console");
Serial.println("==========================================");
while (!(Serial.available())); val = Serial.read();
Serial.print("you select "); Serial.println(char(val));
if (val==49){test(1);}
if (val==50){test(2);}
if (val==51){test(3);}
Serial.println("\n\r stop test return to console");
return;
}
int test(int n){
Serial.println("\n\r============= Select action: =============");
Serial.println("8 - begin test");
Serial.println("any key - stop test and return to console");
Serial.println("==========================================");
while (!(Serial.available())); val = Serial.read();
if (val==56){
Serial.println("you select 8");
Serial.println("\n\r start test");
Serial.println();
if (n==1){
if (delayM(200)==1){myServo.writeMicroseconds(set_pos(0)); return 0;}
Serial.println("throtle from 0 to 49%"); for (n=0; n<50; n++){myServo.writeMicroseconds(set_pos(n)); if (delayM(30)==1){myServo.writeMicroseconds(set_pos(0)); return 0;};}
Serial.println("throtle = 50%"); myServo.writeMicroseconds(set_pos(50)); if (delayM(1000)==1){myServo.writeMicroseconds(set_pos(0)); return 0;}
Serial.println("throtle = 65%"); myServo.writeMicroseconds(set_pos(65)); if (delayM(1000)==1){myServo.writeMicroseconds(set_pos(0)); return 0;}
Serial.println("throtle = 75%"); myServo.writeMicroseconds(set_pos(75)); if (delayM(1000)==1){myServo.writeMicroseconds(set_pos(0)); return 0;}
Serial.println("throtle = 85%"); myServo.writeMicroseconds(set_pos(85)); if (delayM(1000)==1){myServo.writeMicroseconds(set_pos(0)); return 0;}
Serial.println("throtle = 100%"); myServo.writeMicroseconds(set_pos(100)); if (delayM(1000)==1){myServo.writeMicroseconds(set_pos(0)); return 0;}
Serial.println("throtle = 0%"); myServo.writeMicroseconds(set_pos(0));
}
if (n==2){
if (delayM(200)==1){myServo.writeMicroseconds(set_pos(0)); return 0;}
Serial.println("throtle from 0 to 100%"); for (n=0; n<100; n++){myServo.writeMicroseconds(set_pos(n)); if (delayM(50)==1){myServo.writeMicroseconds(set_pos(0)); return 0;};}
Serial.println("throtle = 0%"); myServo.writeMicroseconds(set_pos(0));
}
}
return 0;
}
int delayM(int m){
int k;
for (k=0; k<m; k++){
if (!(Serial.available())){}else{k = 1; Serial.println("\n\r break"); return k;}
delay(1);
}
k = 0;
return k;
}
void beginCalibrate(){
Serial.println("\n\r============= Select action: =============");
Serial.println("1 - calibration weight");
Serial.println("2 - calibration voltage");
Serial.println("3 - calibration curent");
Serial.println("4 - calibration ESC");
Serial.println("any key - return to console");
Serial.println("==========================================");
while (!(Serial.available())); val = Serial.read();
if (val==49){Serial.println("\n\r 1 ok");}
if (val==50){Serial.println("\n\r 2 ok");}
if (val==51){Serial.println("\n\r 3 ok");}
if (val==52){Serial.println("\n\r 4 ok");}
Serial.println("\n\r stop calibration return to console");
return;
}
void loop()
{
Serial.println();
("Helow my frend!");
Serial.println("Please type the comands:");
Serial.println("test, calibration, null, setup");
Serial.println();
Serial.print(">");
while (!(Serial.available()));
String myString = readText(60);
if (myString=="test"){Serial.println(); beginTest(); error = 0;}
if (myString=="setup"){Serial.println("\n\r setup ok"); error = 0;}
if (myString=="calibration"){Serial.println(); beginCalibrate(); error = 0;}
if (myString=="null"){Serial.println("\n\r null ok"); error = 0;}
if (myString==""){Serial.println(); error = 0;}
if (error==0){error=1;}else{Serial.println("\n\r incorrect command");}
}
ЗЫ видео высокого качества следует установить, что бы видеть текст на экране
думаю над созданием чего-то подобного но за основу решил взять такую платку чтоб еще паралельно на дисплее видеть снимаемые параметры.
www.aliexpress.com/item/…/759195015.html
ссылочку тут размещу… за 18 баксов можно получить 5 датчиков на различный вес от 1 до 7кг
Сырой, но уже работоспособный скетч проекта.
Полностью готово меню режимов тестирования.
Имеется три режима тестирования:
первый - автомат с шагом 50, 65, 75, 85 и 100 процентов (как в магазинных тестах), показания снимаются автоматически
второй - то же автомат, с шагом в один от 0 до 100 процентов, показания снимаются автоматически
третий - ручной, вы можете сами набрать процент от 0 до 100 или с помощью +/- подкорректировать требуемый процент, показания снимаются путем нажатии клавиши “r”
Во всех режимах предусмотрена защита от моментального набора оборотов, то есть набор оборотов в большую сторону будет происходить плавно (плавный набор оборотов), так же предусмотрено прерывание теста при нажатии на любую не задействованную клавишу.
Следующая задача, организовать меню и работу калибровок (пока калибровать можно только через изменение скетча).
#include <Servo.h> // добавляем библиотеку для работы с сервоприводами
//объявление переменных
//подключаемые разьемы на ардуине
#define servoPin 3 // для дальнейшей работы назовем 3 пин как servoPin
int DATA = 4; //пин D4 подключаем АЦП тяги
int SCLK = 5; //пин D5 подключаем АЦП тяги
int PWDN = 6; //пин D6 подключаем АЦП тяги
#define CurrPin A0 //пин A0 датчик тока
#define VoltPin A1 //пин A1 датчик напряжения
#define servoMinImp 544 // 544 это стандартная длина импульса при котором сервопривод должен принять положение 0°
#define servoMaxImp 2400 // 2400 это эталонная длина импульса при котором сервопривод должен принять положение 180°
//переменные для работы
float CurrentValue = 0; //переменная для расчета тока (с плавающей точкой)
float CurrentValueRes = 0; //переменная с результатом для расчета тока (с плавающей точкой)
float VoltageValue = 0; //переменная для расчета напряжения (с плавающей точкой)
int32_t Weight = 0; //переменная для расчета тяги (32 разряда)
//переменные для нулевых значений
int32_t WeightNull = 0; //нулевое значение по весу (переменная калибруется при включении)
int CountNull = 0; //нулевое значение по току, данная переменная для однонаправленных датчиков ACS758 (с буквой U) не используется (переменная калибруется при включении)
//эти переменные заполняются пользователем
int ISensor = 200; //максимальное значение измеряемое датчиком (смотрим даташит по ним)
Servo myServo;
int val; //здесь будет храниться принятый символ
int n;
int error = 0;
int throttle = 0;
String strnumber = "0";
int throttleOld = 0;
//инициализация
void setup() {
//инициализация I/O
pinMode(DATA, INPUT);
pinMode(SCLK, OUTPUT);
pinMode(PWDN, OUTPUT);
digitalWrite(PWDN, HIGH);
//скорость порта
Serial.begin(9600);
//читаем нулевые значения по весу и току
WeightNull = getSensorValueWeight();
CountNull = analogRead(CurrPin);
myServo.attach(servoPin, servoMinImp, servoMaxImp);
// устанавливаем пин как вывод управления сервоприводом,
// а также для работы сервопривода непосредственно в диапазоне углов от 0 до 180° задаем мин и макс значения импульсов.
// импульсы с большей или меньшей длиной восприниматься не будут.
// для сервоприводов даже одной партии значения длин импульсов могут отличаться, может быть даже и 584-2440.
// поэкспериментируйте и найдите идеальные длины импульсов конкретно для вашего сервопривода.
myServo.writeMicroseconds(set_pos(0));
}
//чтение вводимой строки из терминала
String readText(int n){
int i = 0;
String str;
while (i<n) {
while (!(Serial.available()));
val = Serial.read();
if (val==13){return str;}
Serial.print(char(val));
str += char(val);
i++;
}
return str;
}
// Функция устанавливает стик газа
int set_pos(int pos) {
int tmp=(servoMaxImp - servoMinImp) /100;
pos = servoMinImp + tmp * pos;
return pos;
}
void beginTest(){
Serial.println("\n\r============= Select action: =============");
Serial.println("1 - begin auto test 50, 65, 75, 85, 100%");
Serial.println("2 - begin auto test 1-100%");
Serial.println("3 - begin manual test");
Serial.println("any key - return to console");
Serial.println("==========================================");
while (!(Serial.available())); val = Serial.read();
Serial.print("you select "); Serial.println(char(val));
if (val==49){test(1);}
if (val==50){test(2);}
if (val==51){test(3);}
//if (val<=48 || val>=52){breakTest();}
Serial.println("\n\r stop test return to console");
return;
}
int test(int n){
Serial.println("\n\r============= Select action: =============");
Serial.println("8 - begin test");
Serial.println("any key - stop test and return to console");
Serial.println("==========================================");
while (!(Serial.available())); val = Serial.read();
Serial.print("you select "); Serial.println(char(val));
if (val==56){
Serial.println("\n\r start test");
Serial.println();
if (n==1){
if (delayM(200)==1){return 0;}
("throttle from 0 to 49%"); for (n=0; n<50; n++){myServo.writeMicroseconds(set_pos(n)); if (delayM(30)==1){return 0;};}
setthrottle(50, 1); if (delayM(1000)==1){return 0;} printRez(50);
setthrottle(65, 1); if (delayM(1000)==1){return 0;} printRez(65);
setthrottle(75, 1); if (delayM(1000)==1){return 0;} printRez(75);
setthrottle(85, 1); if (delayM(1000)==1){return 0;} printRez(85);
setthrottle(100, 1); if (delayM(1000)==1){return 0;} printRez(100);
setthrottle(0, 0);
}
if (n==2){
if (delayM(200)==1){return 0;}
Serial.println("throttle from 0 to 100%"); for (n=0; n<100; n++){myServo.writeMicroseconds(set_pos(n)); printRez(n); if (delayM(50)==1){return 0;};}
Serial.println("throttle = 0%"); myServo.writeMicroseconds(set_pos(0));
}
if (n==3){
if (delayM(200)==1){return 0;}
Serial.println("select throttle percent or press +/- or r for print result");
error=0;
while (1){
while (!(Serial.available()));
val = Serial.read();
if (val==61 || val==43){if (error==1){breakTest(); return 0;}else if (throttle<=99){throttle++; setthrottle(throttle, 0);}else{Serial.println("maximal throttle 100%");}}
else if (val==45){if (error==1){breakTest(); return 0;}else if (throttle>=1){throttle--; setthrottle(throttle, 0);}else{Serial.println("minimal throttle 0%");}}
else if (val==13){Serial.println(); error=0; throttle=strnumber.toInt(); if (throttle>=101){breakTest(); return 0;} setthrottle(throttle, 1); strnumber="0";}
else if (val>=48 && val<=57){Serial.print(char(val)); error=1; strnumber += char(val);}
else if (val==114){printRez(throttle);}
else {breakTest(); return 0;}
}
}
}
return 0;
}
void setthrottle(int throttle, int x){
int r = 0;
if (x==0){
myServo.writeMicroseconds(set_pos(throttle));
}else if (throttleOld>=throttle){myServo.writeMicroseconds(set_pos(throttle));
}else{
r = throttle - throttleOld;
for (n=0; n<r; n++){
myServo.writeMicroseconds(set_pos(throttleOld+n));
if (delayM(30)==1){return;}
}
}
Serial.print("throttle = ");
Serial.print(throttle);
Serial.println("%");
throttleOld=throttle;
return;
}
void breakTest(){
Serial.println("throttle = 0%");
myServo.writeMicroseconds(set_pos(0));
Serial.println("\n\r break");
throttle=0; strnumber="0"; throttleOld=0;
return;
}
int delayM(int m){
int k;
for (k=0; k<m; k++){
if (!(Serial.available())){}else{k = 1; breakTest(); return k;}
delay(1);
}
k = 0;
return k;
}
void servaC(){
Serial.println("\n\r============= Select action: =============");
Serial.println("1 - 100%");
Serial.println("0 - 0%");
Serial.println("any key - return to console");
Serial.println("==========================================");
while (1){
while (!(Serial.available())); val = Serial.read();
Serial.print("you select "); Serial.println(char(val));
if (val==49){
myServo.writeMicroseconds(set_pos(100));
myServo.attach(servoPin, servoMinImp, servoMaxImp);
Serial.println("\n\r 100% ok");
}
if (val==48){
myServo.writeMicroseconds(set_pos(0));
Serial.println("\n\r 0% ok");
}
if (val==49 || val==48){}else{return;}
}
}
void beginCalibrate(){
Serial.println("\n\r============= Select action: =============");
Serial.println("1 - calibration weight");
Serial.println("2 - calibration voltage");
Serial.println("3 - calibration curent");
Serial.println("4 - calibration ESC");
Serial.println("any key - return to console");
Serial.println("==========================================");
while (!(Serial.available())); val = Serial.read();
Serial.print("you select "); Serial.println(char(val));
if (val==49){Serial.println("\n\r 1 ok");}
if (val==50){Serial.println("\n\r 2 ok");}
if (val==51){Serial.println("\n\r 3 ok");}
if (val==52){servaC();}
Serial.println("\n\r stop calibration return to console");
return;
}
//чтение данных тяги
int32_t getSensorValueWeight() {
digitalWrite(SCLK, LOW); // wake up ADC
while (digitalRead(DATA) == HIGH); // wait for data ready, stay in while-loop until LOW
Weight = shiftIn(DATA, SCLK, MSBFIRST);
Weight <<= 8;
Weight |= shiftIn(DATA, SCLK, MSBFIRST);
Weight <<= 8;
Weight |= shiftIn(DATA, SCLK, MSBFIRST);
digitalWrite(SCLK, HIGH); // enter sleep mode
Weight = ((signed long) (Weight << 8)) >> 8; // process as int24_t (two's compliment 24bit)
return Weight;
}
int weightRez(){
Weight = (getSensorValueWeight() - WeightNull)/204.6615;
return Weight;
}
float voltageRez(){
//расчет данных напряжения
VoltageValue = analogRead(VoltPin); // считываем значение аналогового входа (напряжение)
VoltageValue = VoltageValue*0.0298217;
return VoltageValue;
}
float currentRez(){
//расчет данных тока
CurrentValue = analogRead(CurrPin); // считываем значение аналогового входа (ток)
CurrentValueRes = (CurrentValue-CountNull)*ISensor/512; //формула расчета тока для двунаправленнх датчиков ACS758
//CurrentValueRes = CurrentValue*ISensor/1024; //формула расчета тока для однонаправленных датчиков ACS758
return CurrentValueRes;
}
void printRez(int v){
//выводим результат
Serial.print(v);
Serial.print("\t");
Serial.print(weightRez());
Serial.print("\t");
Serial.print(voltageRez());
Serial.print("\t");
Serial.println(currentRez());
Serial.flush();
}
void loop()
{
Serial.println();
("Helow my friend!");
Serial.println("Please type the comands:");
Serial.println("test, calibration, null, setup");
Serial.println();
Serial.print(">");
while (!(Serial.available()));
String myString = readText(60);
if (myString=="test"){Serial.println(); beginTest(); error = 0;}
if (myString=="setup"){Serial.println("\n\r setup ok"); error = 0;}
if (myString=="calibration"){Serial.println(); beginCalibrate(); error = 0;}
if (myString=="null"){Serial.println("\n\r null ok"); error = 0;}
if (myString==""){Serial.println(); error = 0;}
if (error==0){error=1;}else{Serial.println("\n\r incorrect command");}
}
видео пока еще в процессе загрузки
за 18 баксов можно получить 5 датчиков на различный вес от 1 до 7кг
вот что подумал …
чем брать кучу датчиков , может лучше взять один на 10 кг и регулировать чувствительность за счет рычага ??? конструкция как тут 
те один конец датчика крепим к основанию , к второму концу крепим пластину с мотором … так вот чувствительность можно регулировать длиной пластины … те расстоянием от крепления датчика до оси мотора …
я о другом… о том что во первых дешевле штука, во вторых можно под несколько задач/несколько клонов стендов купить
регулировать чувствительность за счет рычага
рычаг, это плохо
проблем в тензодатчике вообще нет никаких
нет никакой разницы, дорогой датчик или дешевый, любой годится
лично я ограничил точность стенда в 1 грамм, хотя можно и до одной сотой