STorM32 BGC: 3-Axis STM32 Brushless Gimbal Controller

Вопрос как искать. 😃
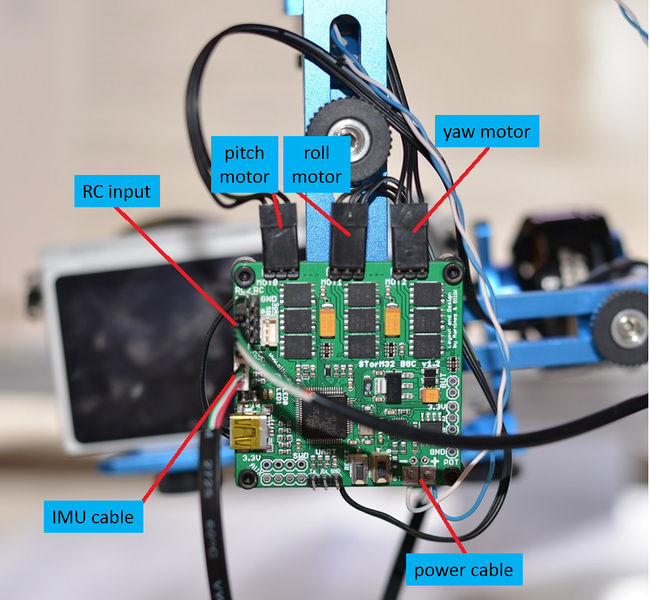
The usage of the three connectors is
Mot0: Pitch motor to point the camera up/down
Mot1: Roll motor to stabilize the horizon
Mot2: Yaw motor to turn the camera left/right
Arkady68, так должно быть?
Нет, не так. У вас нулевой мотор питч. В таком сетапе вы сне сможете снимать вниз. У меня нулевой мотор яв.
Да, вроде новые прошивки позволяют все вариации моторов, вот и сижу чешу репу как прошить контроллер, у меня есть три типа и ни на одном нет подключения FTDI. Все миниатюрные, три нижних с этой странички. Сижу, чешу репу 😃
Прошился до 2.01, включаю подвес. Плата отмигивает, но не сигнализирует о готовности к работе. Моторы без напряжения.
Откатываюсь до 0.96 - всё ок.
Снова прошиваю 2.01 - моторы не работают. Во вкладке “сетап” моторы в положении “нормал”.
Пробежался по ветке Олли, никто о таком баге не отписывается.
Ктонить пробовал 2.01?
А у вас NT подвес? Если нет, читайте текст в розовой рамочке. Он не случайно розовый. Эта прошивка только для NT.
А у вас NT подвес? Если нет, читайте текст в розовой рамочке. Он не случайно розовый. Эта прошивка только для NT.
Мерси Вам, уважаемый. Читать надо лучше. Особенно маркированный текст.😃
Нет, не так. У вас нулевой мотор питч. В таком сетапе вы сне сможете снимать вниз. У меня нулевой мотор яв.
Это что-новенькое.
Но вообще в эксперт тулс есть маппинг моторов.
Скорее всего, ошибся веткой, но всё равно спрошу: уже готовые стабилизаторы на такой плате реально использовать БЕЗ пульта в качестве стэдикама для ГоуПро или нет? 3-х осевой стабилизатор на Али «3-Axis Brushless Gimbal Camera Mount with 32bit Storm32» за 5200 уж очень манит за такую цену.
На геарбесте еще дешевле.
уже готовые стабилизаторы на такой плате реально использовать БЕЗ пульта в качестве стэдикама для ГоуПро или нет?
Реально. Просто при подключении питания будет держать горизонт. Для использования нужно добавить кнопки для ручного управления питчем и немного разобраться с ГУИ.
сколько ему интересно надо для идеальной работы? кто тто тут писал что виснет при напруге больше 11.5
у меня на 14,8 работает исправно, но иногда случались зависоны при низких температурах. Просто заклинивает в одной позе, и трясется вместе с коптером. После того как воткнул кабель I2C задом наперед - глюк больше не наблюдался (тьфу-тьфу-тьфу)
Дело в том,что я как раз таки “поймал” ошибку I2C в момент “зависания”. Они не сыпались тысячами, всего было 2! Поэтому мне кажутся скептическими рассуждения про вольтаж питания. Есть всеми любимая плата 1.31, у которой по ттх минимум 8В и всё. Выразил сугубо своё мнение и не утверждаю, что так оно и есть.
это однозначно i2c, и проблема в кабеле либо разъемах к нему. В конце февраля пытался заснять видео, как раз на финальном заезде на горском треке, и усё, из семи минут только полторы первых нормальные, дальше - болтанка.
Это что-новенькое.
Но вообще в эксперт тулс есть маппинг моторов.
вот и я не могу заставить свой снимать вниз. при достижении определенного угла (более 45 градусов) - питч начинает сходить с ума…
да. кстати, привет всем кто с Новосиба) не ожидал что я в этих краях один на шторме летаю
Кто собирается покупать аналогичный - вот тут хороший ценник сейчас.
Правда, там плата с линейным стабом.
У меня тоже плата с линейным стабом. Не вижу особой разницы.
У вас версия 1.32 как я понимаю.
У вас версия 1.32 как я понимаю.
Судя по всему - да. Не удержался таки и купил. Приедет - увидим.
Давайте ждите. Ко мне долго ехал. Я в китайский Новый год попал 😦
Друзья, подскажите такую вещь.
Поскольку подвес установлен на самолет, естественно режим “pan” стоит по всем трем осям.
Так вот, по питчу все отрабатывается идеально в то время как по роллу при приближении наклона камеры примерно к 40 градусам, мотор входит в резонанс. Это нормально? Если нет то как, допустим, ограничить ему максимальные углы?
Нашел только как ограничить в режиме радиоуправления, но это немного другое.
Сппсибо.
Так вот, по питчу все отрабатывается идеально в то время как по роллу при приближении наклона камеры примерно к 40 градусам
подвес хорошо сбалансирован ? крутите пиды у меня было так же уменьшал пиды трести при сильных углах перестало совсем, но идеально йкартинки пока не получил дрожит всё равно, вообще довльно сложно подобрать пиды, т.к на столе отрабатывает просто идеально во всех плоскостях и во всех допустимых углах, а в полёте ведёт себя совершенно по другому.
я вот когда накрутил по мануалу было вообще дико
www.youtube.com/watch?v=4Z4k3DSl97g
я даже начал думать на ВМГ, потому что не думал что от пидов такое может быть
потом уменьшил пиды
стало вот так
www.youtube.com/watch?v=djTFad_3Yt8
вот куда крутить ещё пока фиг знает, ещё уменьшать ?
кто кстати пользуется модулем bluetooth для контроллера ? удобно с ним? можно в полёте настраивать? скажем запустив live режим и по графикам смотреть ? какой модуль покупать?
потом уменьшил пиды
Вы знаете , очень похоже на мой случай, но я грешил на ВМГ, заказал новое шасси, пропы и регули. Подскажите, у вас подвес от ГЛБ? Какие значения ПИД Вы выставили, что желе ушло?
точные значения не помню, надо подключать смотреть, а по памяти
P в районе 5-8, I 100-150,D 0.05-0.1
да. кстати, привет всем кто с Новосиба) не ожидал что я в этих краях один на шторме летаю
Привет) Я пока ползаю) коптероводство в перспективе. Но, если что, зовите на тусич!😃
Но, если что, зовите на тусич!
заметано) если народ подтянется, хотя бы BeerLift устроить можно будет. А так-то фпв-шники у нас в районе северного объезда тусят
вот куда крутить ещё пока фиг знает, ещё уменьшать ?
что-то мне подсказывает, там не только в пидах дело. Демпферы сейчас какие используешь?
Так вот, по питчу все отрабатывается идеально в то время как по роллу при приближении наклона камеры примерно к 40 градусам, мотор входит в резонанс. Это нормально?
такая же ерунда. Насколько я понял, у гироскопа есть свои предельные углы, превышать которые не стОит. Это та причина, по которой моя гоупрошка, к примеру, не может смотреть вертикально вниз без дрожания. Тупо потому что при повороте на 90 градусов от первоначального значения у гироскопа по идее должно меняться направление осей, чтобы он мог адекватно реагировать на изменившееся положение. Грубо говоря, если ось X на гироскопе располагалась снизу вверх относительно планеты, то при наклоне каеры с гиром в 90 градусов она смотрит вперед. при этом хотят от него того же что и прежде, а дать он это не в состоянии. как-то так
Прошу помочь с настройками.
Снимаю с рук. В целом качество стабилизации устраивает (для домашнего видео), но остаются шероховатости.
Пока снимаю в спокойном режиме, всё нормально, но стоит пробежаться, как начинает подтряхивать.
Явный пример:
На 8 секунде, при пробежке, трясёт, как понимаю по питчу. Что порекомендуете подкрутить?
Подвес GLB; v1.31; 3S