STorM32 BGC: 3-Axis STM32 Brushless Gimbal Controller

а 9250 тестировался ??? как он в сравнении с 20602/20608 ???
по части температурной стабильности - эффект наблюдался только на том одном подвесе или это закономерность ???
мог быть просто дефектный чип или конденсатор на умножителе (14 нога) …
если это выраженная закономерность , то единственная причина которая приходит в голову - на мелкой плате очень высокая скорость изменения температуры в момент инициализации чипа , как следствие неправильно работающая внутренняя компенсация дрейфа …
Может быть имеет смысл принудительно греть резистором гиру, в ней же есть термометр, чтобы температура при работе всегда была примерно одинаковая?
с кварцами так и поступают … только на прогрев и термостабилизацию нужно время , даже если корпус хорошо теплоизолирован …
да, но ведь это выход
да, но ведь это выход
ну так никто не запрещает сделать простенький термостат и поместить в него сенсор … если делать на каком-нибудь мелком микроконтроллере то можно даже ПИД замутить … использовать можно будет с любым типом контроллера , единственно нужно будет его включать заранее , чтобы успел температуру набрать …
тут вопрос в другом , если разводка платы влияет на термостабильность то нужно выяснять причину и закономерности , возможно получится обходиться вообще без всяких городушек с термокалибровками и термостабилизацией.
разводка платы влияет на термостабильность то нужно выяснять причину и закономерности
Особенно, когда на улице плюс/минус 40) Или на земле постоял нагрелся, в воздухе пропами обдувает - остыл)
ну так никто не запрещает сделать простенький термостат и поместить в него сенсор … если делать на каком-нибудь мелком микроконтроллере то можно даже ПИД замутить
Просто зачем это всё, когда свой датчик температуры уже есть в гире и вот именно от него и плясать. Из деталей надо всего лишь сам нагреватель и ключ для него на плате, ну и поддержку в прошивке)
а инвенсенсовских гироакселях есть собственная система термокомпенсаций . все нюансы её работы известны только производителю . Алекс выяснил что на маленькой плате она работает В 10 РАЗ ХУЖЕ чем должна , теперь нужно выяснить почему …
моё предположение что дело в том что в момент инициализации температура растет слишком быстро из за этого неправильно инициализируется система термокомпенсации …
еще одна возможная причина - разность температур на разных концах (ногах) чипа …
основная причина того что мы не греем сенсор - отсутствие достаточной для этого мощности на плате сенсора . стабилизаторы 5v на платах на это не рассчитаны . но это решаемо … дальше контроллер нужно будет включать заранее , дожидаться термостабилизации , и только после этого сбрасывать и калибровать сенсор … это дополнительная задержка в работе …
опять-же это приемлемо только там где нет ограничений по массогабаритам и потреблению …
в случае отдельного термостата , со своим мозгом, его можно будет включить заранее … удорожание конструкции на один термодатчик и микроконтроллер стоимостью в 1 бакс … у нас не стоит задача поддерживать какую-то конкретную температуру , просто температура должна быть выше температуры окружающей среды и каждый раз одна и та же …
Это влияет на горизонт, или на общую работу подвеса?
Сильнее всего влияет на горизонт, а в Storm32 скорее всего и на качество работы моторов, так там больше завязано на углы, измеряемые IMU, чем в SimpleBGC.
а 9250 тестировался ??? как он в сравнении с 20602/20608 ???
Нет, не тестировал, меня он по параметрам не впечатлил.
по части температурной стабильности - эффект наблюдался только на том одном подвесе или это закономерность ??? мог быть просто дефектный чип или конденсатор на умножителе (14 нога) …
Чип я выпаял из другого сенсора, где не было подобных проблем, по крайней мере на 90% думаю, что это не проблема конкретного чипа. Если отсутсвует контакт с конденсаоторами, то это проявляется в виде сильного шума, при ручной сборке на это смотрим в первую очередь.
Термокомпенсация возможно и есть в самом чипе, и возможно она расчитана на монтаж на более толстый текстолит. Очевидно что при нагреве разнородных материалов с разным коэффициентом расшиения, их изгибает. А сенсор к этому очень чувствителен: если на это плате просто подогнуть один из проводов, эта казалось бы, небольшая статическая нагрузка, смещает ноль на десяток единиц.
Просто зачем это всё, когда свой датчик температуры уже есть в гире и вот именно от него и плясать. Из деталей надо всего лишь сам нагреватель и ключ для него на плате, ну и поддержку в прошивке)
Да, так и есть - термостатирование в теории делается очень просто парой резисторов, термобарьеом на плате в виде прорезей и термоизоляции. Мы попробуем сделать ее в новом сенсоре, который сейчас в разработке.
основная причина того что мы не греем сенсор - отсутствие достаточной для этого мощности на плате сенсора . стабилизаторы 5v на платах на это не рассчитаны . но это решаемо … дальше контроллер нужно будет включать заранее , дожидаться термостабилизации , и только после этого сбрасывать и калибровать сенсор … это дополнительная задержка в работе …
Там большие токи не нужны. Точных цифр не помню но вроде как 200mA достаточно для поддержания 50 градусов. Стаб 5V на наших контроллерах подвеса до 1А выдает, провода и разъемы сенсора 200mA должны пропустить. Алгоритм инициализации конечно усложнится, но это решаемо. Возможно будет задержка в старте системы. На чипе нужен отдельный MCU, и дело не только в его цене - его нужно прошивать, тестировать - т.е. доп. расходы при массовом производстве. Кстати, Invesense года полтора назад анонсировал гиросенсор с термостатированием. Интересно почему так и не выпустили, и убрали из списка продуктов.
На чипе нужен отдельный MCU, и дело не только в его цене - его нужно прошивать, тестировать - т.е. доп. расходы при массовом производстве.
Ну вот сейчас в storm32 nt на плате датчика стоит огромный контроллер, который ничем не занимается, кроме как опрашивает гиру и посылает по сериал на основную плату. Кстати всё приходит голое без прошивки вообще и ставится оно не парой кликов, так что пользователи вроде привыкшие.
меня он по параметрам не впечатлил
А что именно за характеристики нужны для подвесов? Предельные скорости и перегрузки, частота опроса - это же всё ненужно? Термостабильность? Если делать подогрев, то мне кажется и на мпу6000 можно остаться, по крайней мере она нешумная.
управление нагревом можно решить и без дополнительного микроконтроллера , просто добавить еще один провод (пятый) и отдельным пином на RC/FC или AUX … тогда пользователи смогут сами делать теммобоксы … ну или добавить 6-8 ногий MCU … в CAN версии сенсора и так есть процессор … (Олли тоже начинает ставить CAN в свои разработки , так что надеюсь что будут и CAN сенсоры и CAN моторы от Storm) …
кажется и на мпу6000 можно остаться
про них лучше сразу забыть … ща брака немеряно … я их больше покупать не буду …
ЗЫ: ща подумалось можно использовать I2C I/O на сенсоре для управления ключом , что то типа MAX7323 … или сразу драйвер мотора с I2C управлением , например Drv8830 … по наличию такого чипа на шине можно автоматом определять что сенсор с термостабилизатором … и никакого MCU не нужно …
Для подвесов важен высокий сигнал/шум и хорошая термостабильность. 9250 - это тот же 6500 + компасс. Компасс там не самый лучший и его не стоит ставить туда же, где обычно ставится гироскоп, так что никакого смысла в переходе на 9250 я не вижу.
Вариантов термостатирования и правда много. Хочется сделать все правильно, для этого все же лучше иметь отдельный MCU который управляет нагревом посредством ШИМ и “знает” две температуры: внутри и снаружи, для оптимального ПИД-регулятора. По мере накопления опыта может быть попробуем и варианты, которые аппаратно попроще (всем будет управлять главный контроллер через I2C).
ща брака немеряно
А какого рода брак встречался вам в этих сенсорах?
А какого рода брак встречался вам в этих сенсорах?
самый разный … были и не работающие оси , и разная чувствительность по осям , и пролазили данные из одной оси в другую (иногда складывалось впечатление что кристалл повернут на несколько градусов) … притом это было как на MPU6050 так и на MPU6000 (хотя и значительно реже).
были жалобы что калибровки сильно плыавут со временем , тоесть вы делаете термокалибровку а через пару месяцев эффект от нее сильно падает , нужно делать заново … один из московских партнеров купил большую партию 6050 и вся партия оказалась бракованной , в результате выпросили у меня десяток из старых запасов иначе у них выставка срывалась …
Хочется сделать все правильно, для этого все же лучше иметь отдельный MCU
поэтому начинать нужно с CAN , там полюбому без MCU никак …
поэтому начинать нужно с CAN , там полюбому без MCU никак …
Мне кажется Алексей подразумевает контекст использования для маленьких ручных и подвесов, где и так мало места поэтому по i2c.
Как реализовать механизм переворачивания оси яв? То есть нужно включить реверс яв мотора с рк инпута.
Раз тут начали говорить о гирах, что вы думаете об 20649? www.invensense.com/products/…/icm-20649/ Уже опытные образцы полётников с ними есть.
20649 - не тот профиль. Он для спорта сделан, где нужна большая динамика. Для этого в два раза загрублен диапазон.
Не могу никак смену режимов настроить с трёхпозиционного канала, в вики об этом ничего нет. Сейчас получается так:
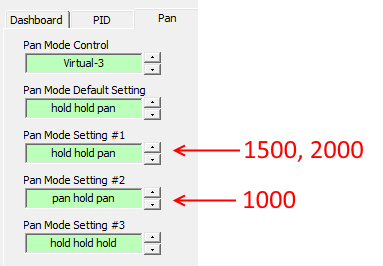
У всех так работает?
Может кто подсказать, какой толщины провод допустИм для моторов по осям? Стандартные моторки, как с подвесами идут алишными.
Хочу заменить родные, т.к. колом стоЯт мешают поворачивать камеру. От наушников, если распотрошить простенькие, в шёлковой изоляции очень тонкие будут?
Очень сильно зависит от конкретного повода … если это обычный медный литцендрат (где прочностные характеристики определяет сама медь) то вполне возможно использовать под мелкие моторки …
но … провод может оказаться алюминием (китайцы и такое делают) , за прочностные характеристики может отвечать внешняя пластиковая или тканевая оболочка , тогда сечение будет явно недостаточным …
ну и достаточно часто в качестве провода для наушников используют “мешуру” … те медные жилки или ленты вплетены в волокна (обычно синтетические) … такой провод также имеет очень маленькое сечение (хотя на вид жилы толстые , большую часть их сечения составляют волокна )…
Очень сильно зависит от конкретного повода … если это обычный медный литцендрат (где прочностные характеристики определяет сама медь) то вполне возможно использовать под мелкие моторки …
но … провод может оказаться алюминием (китайцы и такое делают) , за прочностные характеристики может отвечать внешняя пластиковая или тканевая оболочка , тогда сечение будет явно недостаточным …
ну и достаточно часто в качестве провода для наушников используют “мешуру” … те медные жилки или ленты вплетены в волокна (обычно синтетические) … такой провод также имеет очень маленькое сечение (хотя на вид жилы толстые , большую часть их сечения составляют волокна )…
Алюминиевые провода лучше медных, они легче. Только вот концы у них плохие. Да и правда ломаются ещё.
Знать бы откуда их вырвать на пробу. Но родны однозначно менять надо… Есть у меня 18авг (кажется 18, не помню, которыми монтаж ПК и перифирии делал в коптере) в силиконовой изоляции. Они очень мягкие, но по диаметру примерно как родные. Заменю на эти, если не найду ничего подходящего потоньше. Разве что надо будет три жилы кусочками термоусадки фиксировать наверное.
От наушников, если распотрошить простенькие, в шёлковой изоляции очень тонкие будут?
Мне понравились провода от мышек, в некоторых тонкий, мягкий и прочный провод.