Полетный контроллер Tarot ZYX-M

переведен в сбас
да, спасибо во второй s-bus воткнул, и пошло
завтра разберу, со спутниками никак, что то не найти ему, моргает желтый-4 красных, час ждал
попробую перекалибровать
зы у буржуев же хорошо летает, уже и там через гуловодчик:) “курил” тему:)
чувствую новая таротовская рама на назе полетит
попробуй перекалибруй, а по вспышкам желтый-attitude,сиреневый-жпс, синий-авто, 1 красный-6 спутников, 2красных-5, 3 - меньше 5и, 4 -нет вообщ, не моргает красным больше 6и спутников.
да у буржуев летает шикарно😁
а как правильно откалибровать сам контроллер? компас один раз калибранулся и больше не хочет входить в режим калибровки. а есть рабочий девайс? у буржуев
тож не у всех летает)
неделю уже пытаюсь что то вычитать)
он же должен летать в атт? у меня прост кувыряется сразу
Про калибровку контроллера - если я правильно понял перевод ассистанта - -по гироскопу - ежели показания его во вкладке Tool более 0,2 - требуется перекалибровка.
Установить коптер неподвижно и нажать кнопку “Calibrate Gyroscope”, дождаться, пока в строке состояния высветится ОК.
-по акселерометрам. Если показания менее 9.6 или более 10.0 - требуется калибровка.
Для этого снять контроллер с модели (вот это непонятно, я затрахался тянуть к нему питание от коптера) и нажать кнопку “CalibrateAccelerometer”, и крутить контроллер на ровном столе в 6 плоскостях,удерживая его в каждом из положений не менее 2-х секунд.
У меня до этих манипуляций было по акселям 10.1, после стало 9.8
Не знаю, изменилось ли что-либо в поведении коптера - так как он по-прежнему так и не хочет себя никак вести, ну совсем никак…
тоесть он у вас не запускает моторы? а смысл ровного стола если везде торчат провода
у меня пуск вниз влево вниз вправо. но соответственно дальше кувырок ну гпс не хочет никак ловить, хотя когда всё собирал и тестил, моргал фиолетовым?!
Ну, во-первых, провода не везде торчат - а только с двух сторон - питание и USB. Я эти две стороны удерживал в руках насколько смог ровно.
Во-вторых - я полагаю, что в будущем вообще контроллер снимать не буду - а буду сам коптер крутить в 6 плоскостях.
По Вашей проблеме - не в курсе - пользовались ли Вы ранее Назой - но по правилам Назу нужно было устанавливать разъемами моторов вперед по ходу.
На Тароте малюсенькая стрелочка указывает в обратном направлении. Может, в этом причина? В настройках можно выставить положение контроллера в любом направлении, попробуйте там поиграться…
Ну, а у меня маленькая радость - мои моторки наконец-то стартанули! 20 раз перекалибровывал сами регули и установку стиков - на 21-й раз наконец-то старт выполнен! Стики вниз - врозь.
Собираю дальше, дальше будем посмотреть…
о!) поздравляю)))
ая с гейнами борюсь.
на где то там форуме вычитал что у них ляп с “мм” и “см” вышел в монтаже контроллера
я сам нуб полный в общем то. можт подскажете что куда крутить?
о!) поздравляю)))
ая с гейнами борюсь.
на где то там форуме вычитал что у них ляп с “мм” и “см” вышел в монтаже контроллера
я сам нуб полный в общем то. можт подскажете что куда крутить?
В мануале есть таблица гейнов
был за городом сегодня. калибранул компас. спутники поймались сразу бэз ожидания.
гейны ко мне не подходят
методом тыка щёлкаю. английский средний, гуг переводит чуть луше, промт рулит. посему и спрашиваю кто за кого отвечает, т.к. вибрация небольшая есть при самом пуске, в воздухе всё ок
правильная ссылка на видео по контроллеру
Привет, друзья. Как я пониааю, таротовский контроллер по gps координатам летать не умеет. Только на пульте и авто возврат домой. ?
В общем так и не удалось спутники поймать, поперся в поля, в атт взлетел, метров на 15-20, и тишина, отлетал 25 мин
соответственно и компас не калибруется
грешу на гпс
гейны не трогал, на 550 раме с Е300, вполне адекватно, по умолчанию ведет себя
что то я аж расстроился
И еще очень интересно, контроллер от тарота будет корректно работать установленный на 800 раме? Или есть ограничения по чувствительности и размерам рамы?
по скудному мануалу должен

Андрей, вскрой гпс посмотри пайку, китайцы всегда этим грешили.
вскрой гпс
фсё! вот сидел смирно, а рученки чесались
сейчас вскрою
Заодно и узнаем что там в нутрях)
ublox neo-6m-0-001

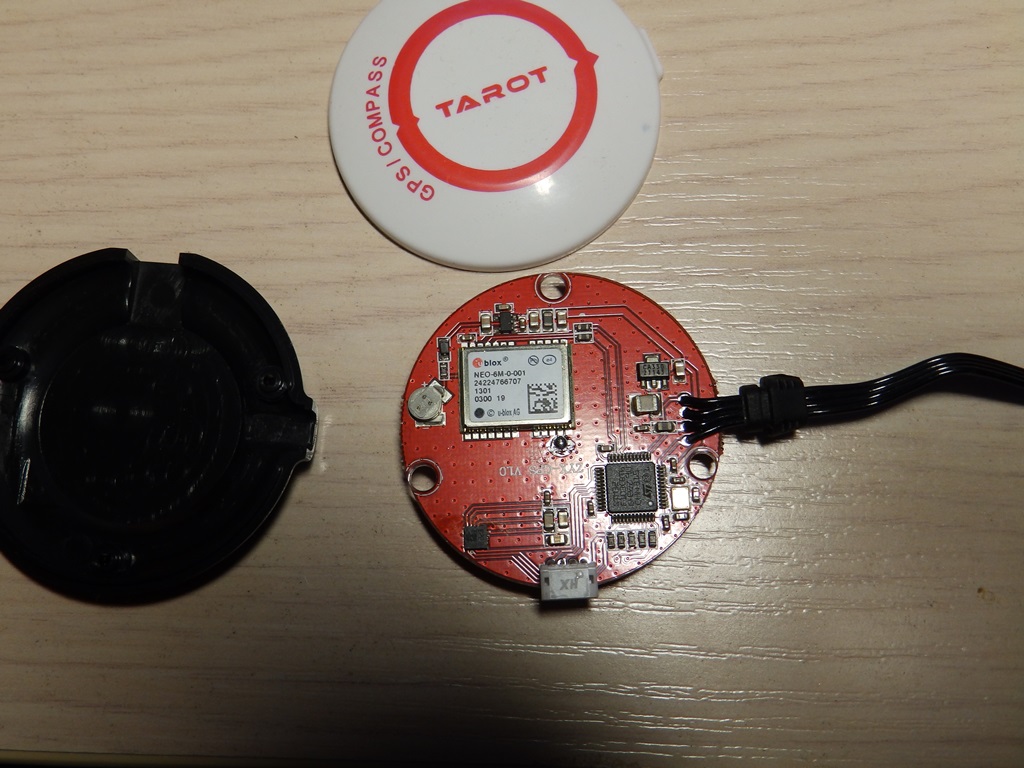
ublox neo-6m-0-001
моглибы 7м или 8м поставить, атак знаем что на замену брать, пайка норм или как сморкнулись? Или гпс мертвый?
пайка норм или как сморкнулись? Или гпс мертвый?
пайка в норме, грешу на гпс
завтра может чего и решится
Всем привет!!!
Два дня занимался испытанием контроллера XYZ-M, могу сказать одно, он себя показал с хорошей стороны, хотя в начале доставил малость хлопот.
Во время испытаний, Я квадрик угонял далеко пока не пропадет видео сигнал, после чего специально выключал передатчик, переводил в режим GO-Home, просаживал напряжения до первого уровня, квадрик все время самостоятельно возвращался домой и самостоятельно производил посадка с погрешностью +,- 1 метр.
Могу сказать одно, летать с на этом контроллер проще комфортнее, чем на К.К-2.0., своих денег он стоит и впечатления только положительные.
Еще осталось дождаться от TAROT OSD для контроллера и будет вери гуд, лично у меня пока установлена OSD с модулем GPS от Tarot TL300L для контроля питания и высоты и количества спутников.