Векторное управление BLDC

А зачем вообще шунт нужен если можно прям на мосфете измерять ?
можно , только измерения будут ± трамвайная остановка …
сопротивление перехода не постоянно и меняется от очень многих факторов … в том числе от температуры и достаточно сильно …
Потерялось вот, не нужно? The following libraries were not found:
Должно без этого открываться.
А зачем вообще шунт нужен если можно прям на мосфете измерять ?
Точность сопротивления шунта посмотрите www.seielect.com/catalog/sei-csnl.pdf и сравните с графиком зависимости Rdson от температуры. Такие замеры годятся только для детектирования КЗ.
Немного ошибался на счет предельного тока, 75А получается без радиатора и обдува и можно пробовать больше. В долговременном режиме скорее всего будет нужна искусственная конвекция.
Заметьте это фазный ток, что ходит по мотору, а не потребляемый. Нужно хорошо подобрать нагрузку, чтобы получить такой ток по входу не превышая фазный ток. Этот тест был на моторе rotomax 1.20. На картинке ток, температура платы и потребляемая мощность.
alexeykozin а по ссылке регулятор как понимать, 6-14s это нужно умножить на 3.7в получается питание 22.2-51.8 вольт? А почему именно li-po? От автомобильного не будет работать? И как он синхронизируется? Датчиками или бездатчиковый? Есть опыт использования? Чота это все сомнения вызывает, те векторные регуляторы что на алибабе встречаются меньшей мощности, а цена в р-не 10000. Наверное какой нибудь кривой костыль который на низких оборотах вообще крутить не будет, или момент куриный будет, что думаете?
при пересчете из ли-по и ли-он в максимально допустимое напряжение число S умножают на 4,2вольта. 3,6 у лион и 3,7 у липо это среднее рабочее в ходе цикла заряд разряда.
по векторным руглям я так и не нашел дешевой альтернативы,
для моторов с датчиками холла - есть решения порядка 500-750 пиковой мощности до 1000р
дополнительный плюс наличия датчиков хола - гарантированный старт мотора с максимальным усилием под нагрузкой.
вот что я пробовал
вариант 1
ru.aliexpress.com/item/…/32825522360.html
регуль отдает заявленную мощность, без существенного нагрева даже без радиатора. максимальное напряжение от которого пробовали 39 вольт
-этот регуль выдает прямоугольные импульсы (не синус и даже не трапеция) изза чего на максимальной мощности под нагрузкой неприятный тролейбусный гудеж
-
регуль управляется постоянным напряжением 0-5вольт на вход vr ,
-
имеет реверс.
-
есть защита по току
-
есть защита если мотор долго не стартует
- нет тормоза
- пока накат колеса не завершается реверс не включится.
вариант 2
ru.aliexpress.com/item/…/32841355316.html
-
не гудит под нагрузкой, наверное синус или что то типа того
-
максимально по потреблению давали 750вт, от 12S сколь существенного нагрева не обнаружено
-
есть защита по току
-
есть защита если мотор долго не стартует
-
есть защита от переразряда батареи (по низкому напряжению)
-
управляется постоянным напряжением 0,8 - 4,5 вольта что является типовым выходом для ручек или педалей акселератора с датчиками холла
- слабый тормоз,
- реверс может быть настроен при сетапе
- использовать реверс для заднего хода автомобиля не получится.
тестил на мотор колесо от гироскутера 10,5 дюймов, купленное за 1500р на радиорынке, при самой долгосрочной и большой нагрузке колесо чуть теплое.
аналогичные колеса на авито и юле почемуто дороже, просят 2000-2500тр, возможно можно уторговать
подборка небольших видео
www.youtube.com/playlist?list=PLZAtOnM_9-yO0DDbLJM…
www.youtube.com/playlist?list=PLZAtOnM_9-yO0DDbLJM…
какая сейчас актуальная стоимость изделия?
какая сейчас актуальная стоимость изделия?
Около 9000р.
Вот добавил возможность управления по сервосигналу.
Всем привет, можно сказать подзаразили меня товарищи из этой темой идеей поисследовать код и аппаратные решения.
за основу взял blue pill stm32duino (stm32f103c8) и останки от сгоревшего регуля (драйверы и ключи остались живы)
стартовал в ардуино иде, затем в местах где тормоз переписал на более быстрые методы, с производительностью пока проблем нет.
первая проба-цель была запустить маленький коптерный моторчик в совершенно безсенсорном режиме тоесть совсем без обратной связи ни эдс, ни токов, ни холов.
посчитал табличку синусов в массив и крутил пвм углы на фазах как 0, 120, 240 градусов с шагом в 1 градус (тупо взял идею от немецкого брашлес гимбал). частоту шим сделал 50кгц
увеличивая обороты достиг того что моторчик плавно разгоняется и выходит на большие обороты, но при этом момент очень небольшой.
второй шаг прикрутил код считывания холов, из него таблица положение-> угол,
при этом, на данном этапе, углы на обмотках решил пока не дробить по прогнозу скорости.
поскольку из моторов с холами у меня только мотор-колесо от гироскутера - эксперимент стал делать на нем.
по прерыванию от любого из холов считываю значение PORTB в один такт (у меня все холы на нем пины 13,14,15 т.е. сдвигая на 13 бит взад я сразу получаю готовый степ холлов)
в массивчике сразу прописаны углы для каждого из шагов хол-сенсоров
как только холы срабатывают я пишу углы в пвмы фаз.
причем как то сразу угадал что ноль холов совпал с нулем электрического угла.
движок стартанул и отлично держит нагрузку,
попробовал развернуть фазу холов относительно электрической на 180 - движок стал крутиться в другую сторону
поигрался с углами опережения и офигел от разных эффектов (но это отдельный разговор) оптимальными оказались именно 0 для вперед и 180 для назад.
мне показалось это странным т.к. фронты импульсов холов для направления назад и направления вперед отличаются на 30 градусов. но работает и фиг с ним, пока забил )
дальше интересно было промежутки между степами холов поделить на 60 градусов, сделал это при помощи таймера, при поступлении сигнала от хола сравниваю число шагов и меняю прескалер так чтобы таймер насчитывал к следующему разу 60 шагов. получилось считает более менее ровно 59-61 выходит.
т.е. я имею положение по холам 0, 60, 120, 180,240, 300 градусов и поправку в диапазоне 0-60 и как сумму значение поворота ротора с точностью до градуса.
после того как я применил поградусное управление первый старт показал что я не угадал с углом опережения, задал теоретический для движения вперед -30 между углом с холов и электрическим градусов и вуаля - все завелось!
но осталась таки мистика почему такая разница у 6-шагового и 360 шагового режима.
но вот что меня огорчило. посмотрел я осцилом на фазы и просто в шоке. не то что нет синусоиды, вообще какойто бредовый спонтанный сигнал не поддющийся описанию! (при этом если смотреть на шимы управляющих сигналов - красота, чистый синус!)
стал внимательнее перечитывать тему - собственно вопрос ждать красивой осциллограммы по вольтажу не следует? максимум синус будет в токах фаз?
что делать измерять эдс в фазе и если он не отличается от требуемого синуса менять шим до получения нужного результата - типа как обратная связь в цифровых звуковых усилителях?
максимум синус будет в токах фаз?
Скорее всего - да. В самокатно-велосипедных синусных контроллерах в цепи одной из фаз стоит ACS712-30 или аналогичный.
обычно ставят токовый резистор и микруху спецовый усилок к нему,
даже в китайских гироскутерах на фазах так сделано
ах, да забыл…
есть такая фиговина - гироскутеры, самый ходовой размерчик колес 10-10,5 дюймов, так вот пока зима на авито и подобных живой но помучанный жизнью скутер можно взять от 3тр руб.
а там внутри из полезного
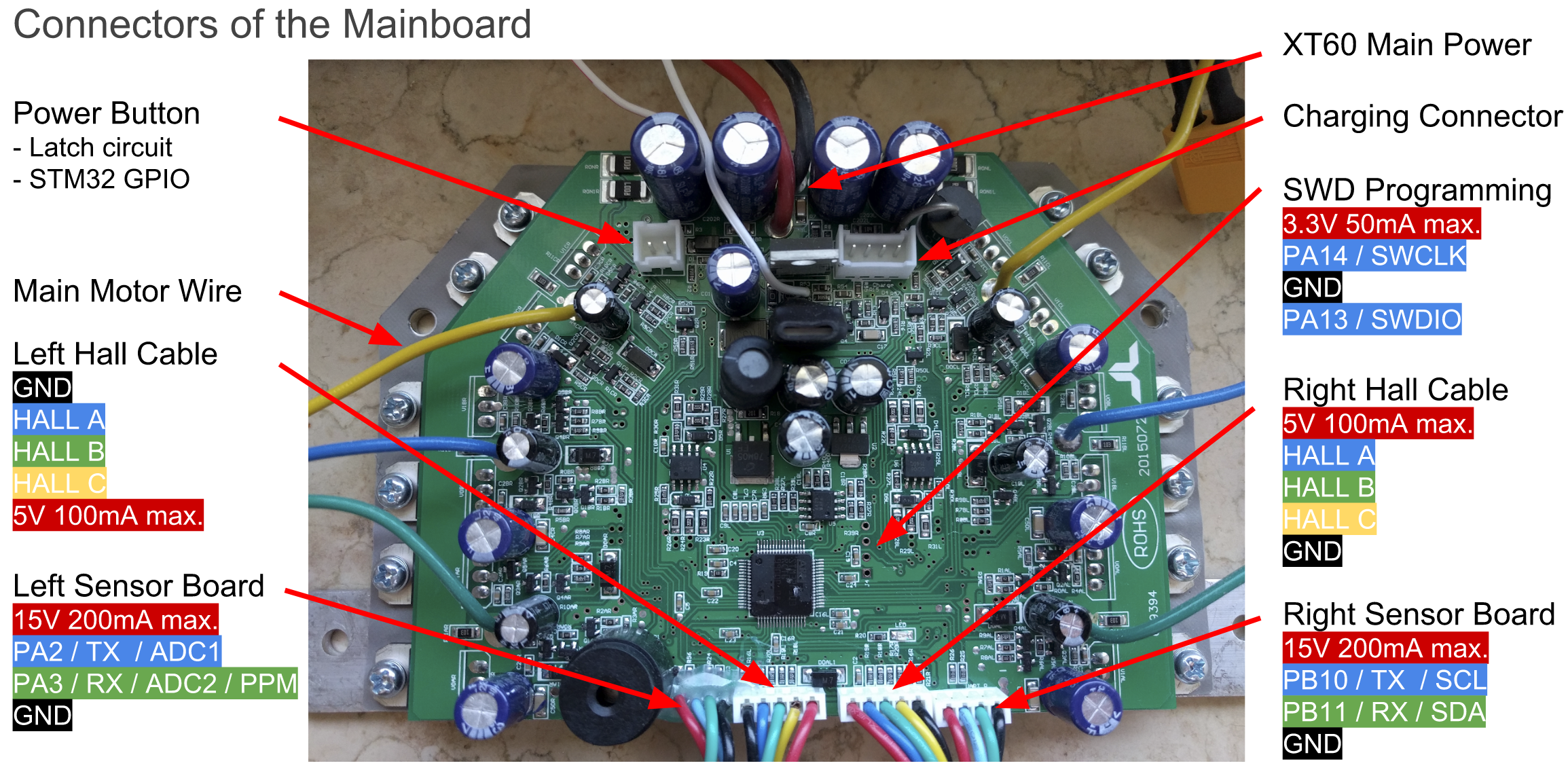
сдвоенный контроллер на который юные дарования написали свою прошивку github.com/NiklasFauth/hoverboard-firmware-hack
два мотор-колеса с холами
10 баночная лион батарея с бмс
зарядное устройство
народ уже прочухал и вовсю пилят самоделки самокаты, самоходные телеги, снегокаты итд. т.к. ценник по цене двух покрышек)
кстати в прошивках юных дарований есть чтение датчиков тока, но дальше похоже эти данные никак не используюся. (я не нашел)
схемка vocke.tv/lib/exe/fetch.php?media=20150722_hoverboa…
есть такой вопрос к знатокам кода регулей.
у меня есть переменная мощности
перед тем как выдать синусы пвм на фазы я умножаю значение пвм на коэф мощности
при этом когда я игрался с маленьким моторчиком от коптера диапазон мощности на старте 0,7 дает ампер нагрузки. когда раскрутился 0,4 при этом ток 0,2 ампера
но когда я подключил мотор-колесо от гироскутера то при 0.7 не стартует! только еле еле душа в теле. и потребление от источник 0,00А! смотрю двухлучевым на фазах - есть межфазовые периоды когда напруга 20 вольт, а не потребляет и тяги нет. попробовал опустить частоту до 10 кгц, еще хуже. поднял до 100кгц, вроде что то появилось но не существенно.
но как даю большую чем 20% скважность то начинается потребление мотором и тяга! начальное индуктивное сопротивление обмотки? это и есть пресловутая диаграмма “сиськи и треугольники” при управлении блдц?
т.е. минимальный пвм нужно поднять на некоторое значение и пусть будет не синус но что то типа что он хочет?
Похоже остановлюсь на вот такой конструкции, радиатор на обратной стороне платы. Удалось проверить пока до 70А, греется до ~60°C, при этом вся плата обдувалась вентилятором.
Кому нибудь интересно взять регулятор на тест? У меня возможно будет лишний экземпляр.
стал внимательнее перечитывать тему - собственно вопрос ждать красивой осциллограммы по вольтажу не следует? максимум синус будет в токах фаз?
Слишком дорого делать синус в напряжении, пострадают другие параметры. Оставьте это каким нибудь прецизионным приводам где вибрация недопустима, или огромным промышленным двигателям где dU/dt портит изоляцию обмоток. Впрочем, добавить LC-фильтр на выход любого регулятора не сложно.
но как даю большую чем 20% скважность то начинается потребление мотором и тяга! начальное индуктивное сопротивление обмотки? это и есть пресловутая диаграмма “сиськи и треугольники” при управлении блдц?
Из текста сложно понять, что у Вас происходит. Схема ШИМ не должна так проявлять себя, она никак себя не должна проявлять пока не начнете упираться в 100% заполнения.
Кому нибудь интересно взять регулятор на тест? У меня возможно будет лишний экземпляр.
очень интересно потестить, нет эталона для сравнения своих регуляторов/прошивок на предмет крутящего момента нагрева и кпд
вот нашел еще одно применение самодельным регуляторам.
radiokot.ru/circuit/digital/security/31/
у моих драйверы до 600вольт, можно поставить высоковольтные ключи и сделать дешевый частотник для 3х фазного асинхронного движка.
по востребованности
- у соседа по даче сгорел мотор на воздушном компрессоре (источник воздуха для покраски и плазморезки) 2,2 квт, трехфазник от одной фазы с конденсатором.
купил новый, но тянет слабо, греется производительность крайне низкая.
Для эксперимента взял частотник от чпушного шпинделя, настроил - и о чудо производительность компрессора выросла втрое, мотор холодный, на старте плавно разгоняется не перегружая сеть.
но готовые частотники дороговаты, поэтому мысль - сделать вариант с высоковольтными ключами и прошивой под контроль асинхронного мотора.
по ссылке выше - неплохое описание принципа и режимов работы
у моих драйверы до 600вольт, можно поставить высоковольтные ключи и сделать дешевый частотник для 3х фазного асинхронного движка. по востребованности
Нет, асинхронники это уже совсем не ко мне. Совсем другая схемотехника на такие напряжения и другие методы управления.
очень интересно потестить, нет эталона для сравнения своих регуляторов/прошивок на предмет крутящего момента нагрева и кпд
Хорошо, значит подготовлю плату как будет возможность.