Пропеллеры пробовал двух типов - трех и двухлопостные, среднего качества.
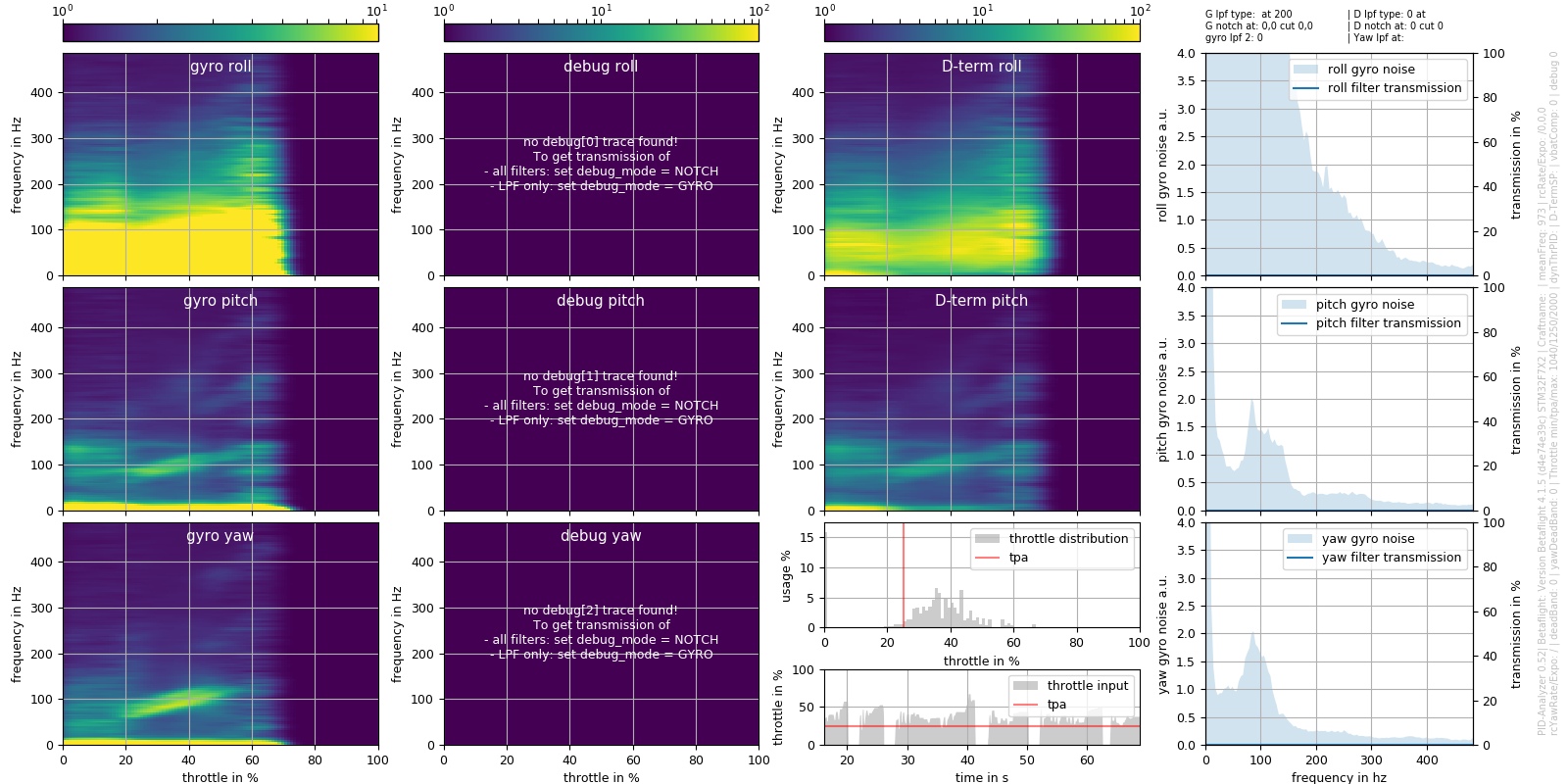
Основной вопрос в том, почему такая большая разница между осями Pitch и Roll. С Pitch можно работать - всё ясно. Я понимаю, что момент инерции по Pitch больше, из-за продольного расположения аккумулятора, но не думаю, что это настолько влияет. Изначально думал, что просто параметр P и D для Roll слишком большие. Но их уменьшение не дает никакого результата.
Пробовал и INAV и Betaflight. Разницы нет.
LPF уменьшал, особо результата не получил. Крепление контроллера на стоковых силиконовых маунтах. Всё симметрично.
В коптеростроении я без опыта - первый коптер.
Видимо я что-то упускаю. Прошу вас помочь определить причину таких шумов по одной оси.
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"5e398c473df95500776f63a7":{"_id":"5e398c473df95500776f63a7","hid":351758,"name":"faster","nick":"faster","avatar_id":null,"css":""}},"settings":{"can_see_ip":false,"can_report_abuse":false,"can_see_hellbanned":false,"forum_can_view":true,"forum_can_reply":false,"forum_edit_max_time":30,"forum_can_close_topic":false,"forum_show_ignored":false,"forum_mod_can_delete_topics":false,"forum_mod_can_hard_delete_topics":false,"forum_mod_can_see_hard_deleted_topics":false,"forum_mod_can_edit_posts":false,"forum_mod_can_pin_topic":false,"forum_mod_can_edit_titles":false,"forum_mod_can_close_topic":false,"can_vote":false,"forum_mod_can_add_infractions":false,"forum_topic_title_min_length":10,"forum_reply_old_post_threshold":30,"votes_add_max_time":168,"forum_show_post_interval":7,"can_see_deleted_users":false},"section":{"_id":"61c9a54c3df9550077bb51e0","hid":123,"title":"Коптеры. Комплектующие, сборка, настройка.","parent":"61c9a54c3df9550077bb51fe","description":"","is_category":false,"is_votable":true,"is_writable":true,"cache":{"topic_count":1142,"post_count":370881,"last_post":"68eaaf32eede43b1c479d52a","last_topic":"68e1775300fb687e16f33657","last_topic_hid":572658,"last_topic_title":"SpeedyBee F405 V3 Барометр","last_ts":"2025-10-11T19:25:38.659Z","last_user":"68dbe48444153b38659b4133"}},"topic":{"_id":"5e80c86f3df9550077bfd762","hid":553935,"title":"Шум гироскопа по Roll, а по Pitch всё ок","views_count":623,"last_post_counter":1,"cache":{"post_count":1,"first_post":"5e80c86f3df9550077bfda81","first_ts":"2020-03-29T16:10:23.000Z","first_user":"5e398c473df95500776f63a7","last_post":"5e80c86f3df9550077bfda81","last_post_hid":1,"last_ts":"2020-03-29T16:10:23.000Z","last_user":"5e398c473df95500776f63a7"},"st":1,"section":"61c9a54c3df9550077bb51e0"},"subscription":null,"pagination":{"total":1,"per_page":25,"chunk_offset":0},"posts_list_before_post":["paginator","datediff"]},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}