Подключение и настройка дрона на Omnibus F4 V3S+

Добрый день. Если кто-то сталкивался с таким, помогите пожалуйста подключить и настроить дрон на Omnibus F4 V3S+. Сорри, это мой первый дрон, переживаю чтоб сразу все не спалить.
Купил такой кит: Ali Так же у меня имеется Taranis QX7+R9M 2019 ACCESS, передатчик R9 Slim+. К дрону купил аккум 4S 2200mAh 45-90C.
Развел пока только питание моторов.

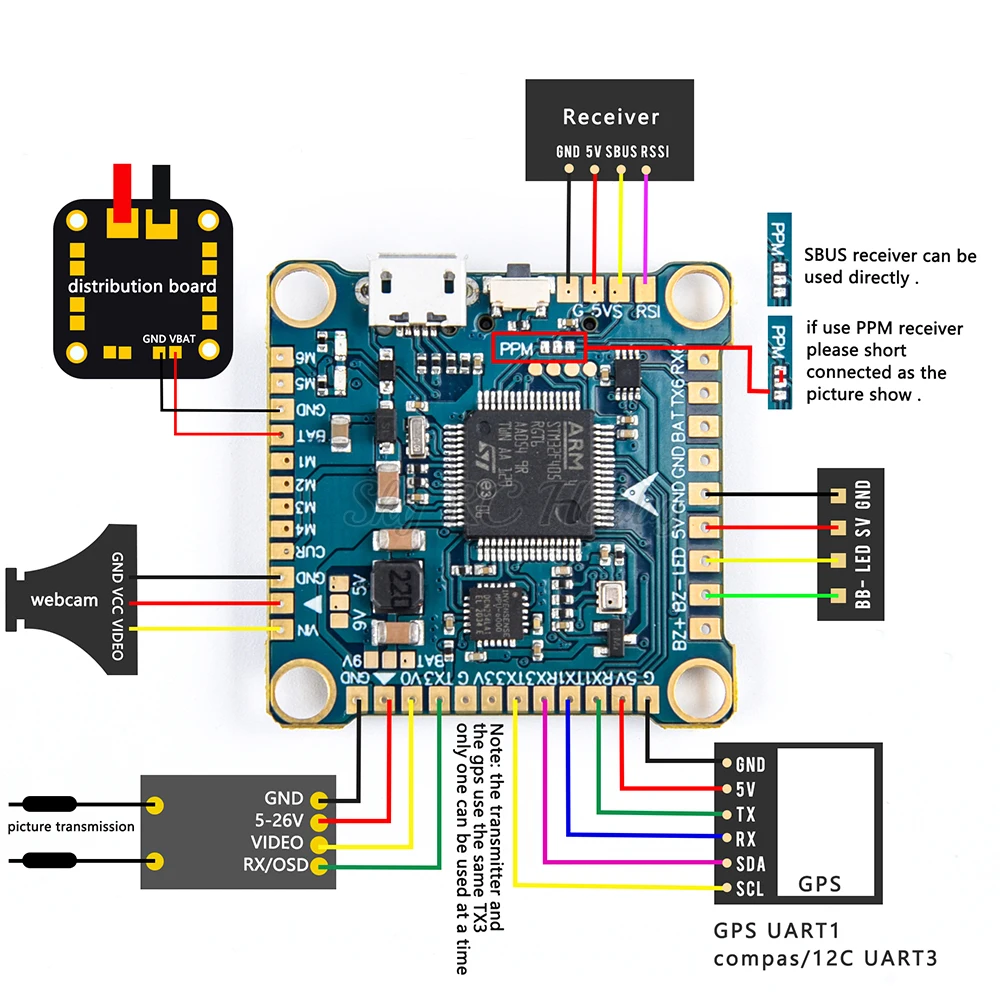
Нашел только такой мануал, дальше не могу нормально понять что к чему:
Собственно вопросы:
- есть 4 пина для ресивера. У R9 Slim+ есть: VCC, S.Port, SBUS IN, SBUS OUT, RSSI OUT, TX1, RX1, GND. Если с VCC, GND и RSSI все понятно, то с SBUS не понял какой использовать. Так же есть 2 Т-антенны, как и под каким углом крепить - не знаю.
- BAT и GND, я так понимаю, питание контроллера, на какие контакты платы питания паять? В 5в или 12в на плате питания? Там еще есть VCC и GND.
- Что такое контакты BB-, LED, SV, GND? Что туда можно/нужно купить?
- Хочу ФПВ какой-нибудь купить и поставить. Если я правильно понимаю, на плате есть разводка под ФПВ, но предатчик использует TX3 вместе с GPS. И если я хочу использовать GPS, тогда мне нужно покупать FPV отдельно?
- В какой последовательности должны быть припяны моторы на полетном контроллере? Я так понимаю белые провода М1,2,3,4, а куда черные паять?
Нашел только такой мануал
Что значит нашел только такой? у каждого электронного компонента своя схема, соберите их в кучку и большая половина ваших вопросов уйдет. вас же в гугле не забанили?
Кстати если хотите обратное вращение моторов то поменяйте их местами.
Если вы спрашиваете, что такое GND, то всё очень плохо. Нужен хоть какой-то ликбез перед началом сборки.
Вопрос 1. Надо немного подумать, как работает приемник. Он принимает волны из эфира и направляет сигнал в контроллер. Следовательно, он делает это через SBUS OUT.
Вопрос 2. Надо опять немного подумать. Контроллер получает питание и меряет его напряжение. Он может работать и от 5 и от 12 вольт, но тогда он будет мерять только 5 и 12 вольт. Чтобы он мерял напряжение батареи, нужно подключать его к питанию от батареи, то есть VBAT. К какому именно - без разницы.
Вопрос 3. BB- это минус пищалки, LED это светодиод, SV это 5V, написанное неграмотным китайцем (на схеме всё очевидно), GND это земля.
Вопрос 4. При чем тут FPV и GPS? Ничего они вместе не используют. И GPS, и передатчик могут использовать любой UART, не обязательно именно 3.
Вопрос 5. Черные провода это земля, припаивать их нужно к земле. Или вообще убрать, от этого ничего не изменится.
Тоже присматриваюсь к этому набору для сборки практически первого квадра на Omnibus F4 V3S+. Не смог найти ответ на вопрос: смогу ли я его перешить на самолетный в Inav, если возникнет желание? Спасибо.
Тоже присматриваюсь к этому набору для сборки практически первого квадра
Честно говоря набор выглядит странно. Зачем использовать такой контролер вместе с отдельно стоящими ESC? С ним лучше использовать 4в1. Тогда ненадо никакой платы питания. А если хочется отдельно стоящие ESC то тогда надо контролер “все в одном” со встроенной платой типа Matek MATEKSYS F405-SE. вообще этот Omnibus F4 V3S Plus какойто странный. Нет не инструкции нормальной, не понятно какой бетафлаевский таргет.
То что в наборе не имеет датчика тока, а без него не комфортно эксплуатировать квад. Не знаешь сколько потратил батареи.
Не понятно зачем такие пропелеры в комплекте. 2 пары 5065 3 лопастных пропеллеров и 2 пары 5030 2 лопастных пропеллеров. 5065 как бы большой шаг. 5030 маленький.
GPS для первого квада совсем не нужен. Лучше бузер с встроенным акком купить. Тем более как там написано нельзя использовать GPS одновременно с камерой.
LEDs тоже не вижу необходимости. Я ниразу не видел как выглядят мои квадрики в полёте 😂.
Ну написано там странное, скорее всего нельзя использовать с компасом, а по хорошему можно не использовать управление VTX или не использовать компас. Надо подключать ПК к компу и смотреть конфигуратор.
А набор понятно что все барахло собрали неликвидное и вроде как по дешевке, а фактически если добавить камеру и видеопередатчик, то цена уже перестанет быть такой привлекательной.
Всех благодарю за аргументированное мнение. По другому посмотрел на этот набор на Omnibus F4 V3S+.
Зачем использовать такой контролер вместе с отдельно стоящими ESC? С ним лучше использовать 4в1. Тогда ненадо никакой платы питания. А если хочется отдельно стоящие ESC то тогда надо контролер “все в одном” со встроенной платой типа Matek MATEKSYS F405-SE.
Matek стоит в 2 раза дороже.
Нет не инструкции нормальной, не понятно какой бетафлаевский таргет.
OMNIBUSF4SD Инструкций валом. V3S это тот же V3, только с фильтром.
То что в наборе не имеет датчика тока, а без него не комфортно эксплуатировать квад.
Датчик тока может быть на ESC 4in1 или на PDB.
скорее всего нельзя использовать с компасом
Я вспомнил этот прикол. UART3 совмещен с I2C, потому нельзя использовать совместно. Но не “GPS и VTX”, а UART3 и I2C. На RX6 там S-BUS, GPS можно вешать на UART1, а управление VTX - на софтсериал. В крайнем случае VTX можно управлять по старинке кнопкой.
Датчик тока может быть на ESC 4in1 или на PDB.
но конкретно на этом PDB нет датчика. если купить с датчиком то цена контролера вместе с PDB сравняется с F405-SE.
Инструкций валом.
Не написано, например, как переключить напряжение для камеры и VTX.
Я вспомнил этот прикол. UART3 совмещен с I2C,
Для новичка это вообще не понятно о чем речь
Добрый день, извините, зацепила корона, сейчас немного отошел.
Если вы спрашиваете, что такое GND, то всё очень плохо. Нужен хоть какой-то ликбез перед началом сборки.
Так я ж не спрашивал про GND. Я дргоуе пытаюсь понять. Спасибо, многое прояснили, осталось несколько вопросов.
Вопрос 1. Надо немного подумать, как работает приемник. Он принимает волны из эфира и направляет сигнал в контроллер. Следовательно, он делает это через SBUS OUT.
Да, об этом я не подумал.
Вопрос 2. Надо опять немного подумать. Контроллер получает питание и меряет его напряжение. Он может работать и от 5 и от 12 вольт, но тогда он будет мерять только 5 и 12 вольт. Чтобы он мерял напряжение батареи, нужно подключать его к питанию от батареи, то есть VBAT. К какому именно - без разницы.
Да тут одним подумать не огрничиться. Кто ж знал, что полетные коноторллеры умеют мерять входящее напряжение и относильно этого работать? Я ж говорю, у меня первый такой квадрик, до этого только на tello и syma x8 летал.
Я вспомнил этот прикол. UART3 совмещен с I2C, потому нельзя использовать совместно. Но не “GPS и VTX”, а UART3 и I2C. На RX6 там S-BUS, GPS можно вешать на UART1, а управление VTX - на софтсериал. В крайнем случае VTX можно управлять по старинке кнопкой.
Извините, но тут вообще не понял. Если есть возможность, объясните пожалуйста подробнее. Или может есть кокой-то чудо-гайд на эту тему.
OMNIBUSF4SD Инструкций валом. V3S это тот же V3, только с фильтром.
Опять же, извините, но для меня это не очевидный факт. Спасибо, почитаю еще эти инструкции. А что имеется ввиду под фильтром?
если купить с датчиком то цена контролера вместе с PDB сравняется с F405-SE.
700-1000 руб.
Для новичка это вообще не понятно о чем речь
Для новичка вообще ничего не понятно.
Если есть возможность, объясните пожалуйста подробнее
На этом омнибусе три порта: UART1, UART3 и UART6. Приемник подключается к 6. Остаются 1 и 3. Компас подключается к шине I2С, это такая шина, на которой висит барометр и к которой можно подключать параллельно несколько устройств. Но контакты для I2C и для UART3 одни и и те же. Поэтому если подключить компас, то нельзя пользоваться UART3, и наоборот. Значит, при подключенном компасе свободным остается только UART1. К нему можно подключить GPS.
Далее у вас есть видеопередатчик. Настройку мощности и каналов можно делать кнопкой на передатчике, а можно через UART (если передатчик поддерживает). Но вместе с GPS свободных портов уже не остается, поэтому управление передатчиком нужно вешать на софт сериал, это тоже UART, но программно эмулируемый, у него где-то там должен быть контакт.
А что имеется ввиду под фильтром?
Фильтр в цепи питания, который снижает помехи в видео.
Да тут одним подумать не огрничиться. Кто ж знал, что полетные коноторллеры умеют мерять входящее напряжение и относильно этого работать?
Дело не только в измерении напряжения, в этом полетнике стоят свои собственные понижающие стабилизаторы напряжения и им по хорошему надо напряжение батареи для нормального питания
в этом полетнике стоят свои собственные понижающие стабилизаторы напряжения и им по хорошему надо напряжение батареи для нормального питания
Им надо, но те же самые стабилизаторы стоят и на PDB, причем они там должны быть лучше. У этого полетника они слабенькие.
Ну не факт, больше не значит что лучше, да и питается ПК от внутренних, зачем питать через 2 последовательно включенных. А навесное оборудование можно и от PDBшных питать, если есть сомнения по нагрузке.
Кто ж знал, что полетные коноторллеры умеют мерять входящее напряжение и относильно этого работать?
- Не относительно этого работать. Если подключить например к плате питания с 12 вольт то в очках будет всегда показываться напряжение 12 вольт. А надо что бы показывалось напряжение батареи.
- Еще обратите внимание на 3 контакта которые расположены рядом с подключением камеры и видео передатчика. Для камеры написано 9v и 5v для передатчика BAT и 9v. Запаивая перемычки между контактами можно подавать разное напряжение на камеру и передатчик.
- Полетник устанавливается чтобы стрелка на нем указывала вперед.
- Mоторы в betaflight (прошивка контролера) расположены так
 соответсвенно от мотора 1 надо припаять провод к M1 итд.
соответсвенно от мотора 1 надо припаять провод к M1 итд.
Кстати на алике есть DiatoneMamba за цену F4V3s aliexpress.ru/item/1005002530628635.html
Причем за одну и ту же цену есть и F4, и F7, не понял почему. По идее, это более продвинутый ПК по сравнению с омнибусом (больше портов как минимум), я бы его купил в подобной ситуации, но уже затарился другими ранее.
Ну и непонятно что там с прошивкой под Inav.
дрон на Omnibus F4 V3S+
Подскажите, быть может пробовали, эксперементировали: на данный контроллер только Betaflight или Inav тоже можно залить?
на данный контроллер только Betaflight или Inav тоже можно залить?
на F4V3? можно всё залить.
на F4V3? можно всё залить.
И F4 V3S+ и F4V3 интересует - данные полётные контроллеры можно и для самолётов использовать под INAV?
И F4 V3S+ и F4V3 интересует - данные полётные контроллеры можно и для самолётов использовать под INAV?
Можно. Но сервы от них запитывать не надо.
Но сервы от них запитывать не надо.
Это понятно - слаботочный BEC на полётном контроллере и возможны помехи по цепям питания от серв. Поэтому питание серв от внешнего BECа, минуса объеденить, управляющий сигнал PWM с полётного контроллера на сервы, если всё же помехи будут - фильтр на питание полётного контроллера - всё верно? Спасибо за информацию.
Здравствуйте! Купил набор с таким же полетным контроллером. Подскажите, получилось ли собрать?