Ан-74

При больших Рейнольсах,
Нас вообще не интересую Рейнольдсы. Достаточно того, что типичный модельный щелевой закрылок работает, добавляет подъемной силы, устойчив даже к крутому планированию. Что еще надо?

Вот тут, совьсем не понял.
Ну и ладно. На этом очередной спор закончен.
Нас вообще не интересую Рейнольдсы. Достаточно того, что типичный модельный щелевой закрылок работает, добавляет подъемной силы, устойчив даже к крутому планированию. Что еще надо?
Если вы читаете внимательно (уже сомневаюсь) то заметите, что к ЩЕЛИ (одной) мое замечание не относится. Вы каждый раз стараетесь доказывать очевидное?
(НЕ ЩЕЛИ)
Я написал так, а вы как поняли?
Однощелевой стреловидный закрылок тоже нифига не тривиальная задача.
Если у кого то есть проблемы, готов помочь, дайте исходные и конечные данные геометрии, а так же особые требования (несинхронность или синхронность движения частей, др.)
да без проблем. Боинг-777, максимальный угол отклонения закрылка 38 градусов, стреловидность по задней кромке 23 градуса. Из особых условий - продольные оси пилонов подвеса закрылка должны быть параллельны (ну +/- 2-3 градуса) продольной оси фюзеляжа. Закрылок фаулера, траектория на ваше усмотрение, не принципиально. Иначе все выше сказанное похоже на … ну впрочем кто в теме, тот знает на что это похоже 😃
Все говорят загадками, поэтому и ответ будет без точных соотношений размеров, вы же сами сказали,
(пусть и в рисунке/чертеже)
ну вот, два изобразил для типов Фауэра с одной щелью, для многощелевых добавляются дополнительные шарниры или приводы. Ничего не выдумано, все давно есть: А) классическая схема с “рельсами”, вариант с прямыми направляющими, можно с непрямолинейными.Красным и оранжевым показаны параллельные в гор. проекции (непересекающиеся) траектории. На моделях делается с двух сторон плоского пилона, который можно заключить в многосекционный обтекатель. В гор. проекции все направляющие можно выполнить параллельно оси ЛА. Во всех подобных мех-мах совершается плоско-параллельное движение, а не поворот вокруг оси, поэтому на каждый закрылок пара должна быть взаимно параллельной, но не объязательно параллельной оси самолета. Неудобство данной схемы в не сплошной структуре закрылка, приимущество в простоте исполнения. Б) У кого современный автомобиль видели кинематику шарниров багажника. Для закрылков Фауэра можно тоже самое но наоборот и прибавить рычаг для тяги исполнительного мех-ма. Размеры плеч очень легко строятся в графике, если есть данные о фазовых положениях. На рисунке “В” - возможная схема “расдачи” перемещений. Размерами плеч качалок можете обеспечить ассимитричность работы (получить переменную по сечению щель). Можно было еще получить необходимые фазы с помощью “ломающихся четырехугольников”, одним словом, с Наступающим Новым Годом.
Мужчина, все это мы проходили и великолепно работает в одной плоскости на бумаге 😃 Но если принимать во внимание, что плоскость закрылка перемещается в трех плоскостях (в приведенном мной случае 38, 15 и 8 градусов соответственно), то все вами нарисованное не имеет практической ценности (мягко говоря). Так что умничать имеет смысл только в случае как минимум на уровне выше среднего владения вопросом с практической точки зрения 😃 Теоретиков тут хватает. Без обид, просто тема остро стоит в данной ветке и вписываться в рассуждения надо предварительно основательно подготовившись… Иначе смешно 😃
Но если принимать во внимание, что плоскость закрылка перемещается в трех плоскостях (в приведенном мной случае 38, 15 и 8 градусов соответственно
Не трех плоскостях, а по некоторой траектории с фиксациями ы трех положениях, раньше вы этого не говорили, только 38 град. Поэтому было сказано "задавать в фазах с величинами смещения и углов. Три плосклсти, это когда в 3 стороны, закрылки работают в 2-х плоскосьях, а если имеется и боковое смещение, то это зависит от установки направляюющих. Если очень уж нужно, зайдите в МАИ на кафедру конструкций.
Не трех плоскостях, а по некоторой траектории с фиксациями ы трех положениях, раньше вы этого не говорили, только 38 град. Поэтому было сказано "задавать в фазах с величинами смещения и углов. Три плосклсти, это когда в 3 стороны, закрылки работают в 2-х плоскосьях, а если имеется и боковое смещение, то это зависит от установки направляюющих. Если очень уж нужно, зайдите в МАИ на кафедру конструкций.
Три плоскости это не мои условия, это условия, которые задает геометрия. А с ней не поспоришь. То что вы нарисовали работает само по себе опосредовано от чего либо. Если один конец этой конструкции приладить к крылу, а второй конец к закрылку, то при выдвижении закрылок двигается в ТРЕХ плоскостях. Так что если к крылу приладить второй такой эе подвес и соединить его с этим же закрылком, то конструкция будет обездвижена. Все это не из теоретических изысканий, а по практическим опытам.


зайдите в МАИ на кафедру конструкций.
то есть вы не в курсе 😃
Если у кого то есть проблемы, готов помочь
не получилось видимо пока 😃
Михаил, а почему шарики не задействовали? Что останавливает?
Часто упоминаете в разных темам о том, что шаровый шарнир решит задачу, но …?
Михаил, а почему шарики не задействовали? Что останавливает?
Часто упоминаете в разных темам о том, что шаровый шарнир решит задачу, но …?
rcopen.com/forum/f131/topic344441/25 у меня то все получилось 😃 я после отчитаюсь что да как более подробно
упоминаете в разных темам о том, что шаровый шарнир решит задачу
На паралелограммах решит. На рельсах - нет.
Картинка показывает возможные отклонения от штатного (полетного) положения закрылка в общем случае, не более. Движение любой точки на закрылках можно прогнозировать (лучше крайних 4-х). В зависимости от требуемого положения (фаз) можно обеспечить перемещение как по цилиндрической (не путать с круговым цилиндром), так и по конической (не объязательно круговой) траекториям. Эскизные кинематики я показал, они обеспечивают движение в 2-х измерениях с разворотом, если вам необходимо третье измерение (в бок от оси ЛА), то оно достигается несколькими способами, самый простой косое но параллельное расположение рабочих плоскостей механизмов. Не понимаю, в чем ваша непонималка? (извините за тавталогию).
Пропорциональное, но не одинаковое смещение крайних профилей закрылка обеспечивается масштабированием кинематики. Все нужно начинать с ЧЕРТЕЖЕЙ В НУЖНЫХ ФИКСИРОВАННЫХ ПОЛОЖЕНИЯХ, а дальше прорабатывать. Иначе воду можно толоч долго. На комплементы не напрашиваюсь, хотел помочь. Извините если не поняли.
Картинка показывает возможные отклонения от штатного (полетного) положения закрылка в общем случае, не более. Движение любой точки на закрылках можно прогнозировать (лучше крайних 4-х). В зависимости от требуемого положения (фаз) можно обеспечить перемещение как по цилиндрической (не путать с круговым цилиндром), так и по конической (не объязательно круговой) траекториям. Эскизные кинематики я показал, они обеспечивают движение в 2-х измерениях с разворотом, если вам необходимо третье измерение (в бок от оси ЛА), то оно достигается несколькими способами, самый простой косое но параллельное расположение рабочих плоскостей механизмов. Не понимаю, в чем ваша непонималка? (извините за тавталогию).
Пропорциональное, но не одинаковое смещение крайних профилей закрылка обеспечивается масштабированием кинематики. Все нужно начинать с ЧЕРТЕЖЕЙ В НУЖНЫХ ФИКСИРОВАННЫХ ПОЛОЖЕНИЯХ, а дальше прорабатывать. Иначе воду можно толоч долго. На комплементы не напрашиваюсь, хотел помочь. Извините если не поняли.
Это все слова, не более того. Слишком много теории и ничего практичного 😦
На паралелограммах решит. На рельсах - нет.
И на рельса тоже может решить, если сместить плоскость направляющей и плоскость действия тяги (симметрично для одного элемента).
если вам необходимо третье измерение (в бок от оси ЛА)напрашиваюсь, хотел помочь. Извините если не поняли.
Да это вы меня не поняли. Мне третье измерение не нужно. Оно просто есть и очень сильно мешает. Вы от теории перейдите к практике и сразу вам все станет ясно. Видимо пространственное мышление не позволяет представить до конца геометрию процесса 😃
Слишком много теории и ничего практичного
Практическое, это что? Макет или … Вы же сами “ничего практического” и не спросили, только “три измерения”.
Мне третье измерение не нужно. Оно просто есть и очень сильно мешает.
Ну вот, приехали. Так эта проблемма и снимается размерами плеч или положением и формой направляющих. Не поленюсь, сделаю макет, дайте исходные и конечные положения. Стереометрию люблю, но на пальцах не очень наглядно, а вы все коментируете, вместо простых картинок. Покажите где ваш злополучный “третий угол”.
Практическое, это что? Макет или
хотя бы схему, которая будет работать “в натуре”
Так эта проблемма и снимается размерами плеч или положением и формой направляющих
в том то и дело, что не снимается она этим
дайте исходные и конечные положения
я уже все дал. Начальное положение 0 градусов, конечное 38. Стреловидность по задней кромке 23 градуса. Этого достаточно. Вылет закрылка может быть любой (для упрощения).
Покажите где ваш злополучный “третий угол”
на выложенных мной картинках это угол “гамма”. Кстати угол “бетта” тоже легкой жизни не обещает.
Для пущей понятности скажу, что данные углы лежат не в плоскости механизма выпуска закрылка, поэтому они и создают сложность.
Так понятнее о чем речь?
Не поленюсь, сделаю макет
можете и полениться. Иначе наступите на те грабли, которые били многих как минимум весь 2013й год 😃
Надо бы смириться и признать свои заблуждения и сказать, что типа сорри, херню сморозил 😃 Ну или поздороваться с граблями 😃
что типа сорри, херню сморозил Ну или поздороваться с граблями
интересно наблюдать, как человек свои проблемы приписыват другим.
интересно наблюдать, как человек свои проблемы приписыват другим.
интересно наблюдать как человек не хочет свою правоту признавать 😃 Я, кстати, в этом вопросе (по закрылкам) начинал с того же что и вы сейчас: считал себя самым умным и говорил, что у меня то все работать будет на УРА. И сделал… И уткнулся лбом в стену. И признал свои заблуждения 😃
Я свои проблемы никому не приписываю. Проблема с закрылками она не моя, а общая. И для своего случая я ее решил.
Проблема с закрылками она не моя, а общая.
С Новым годом!
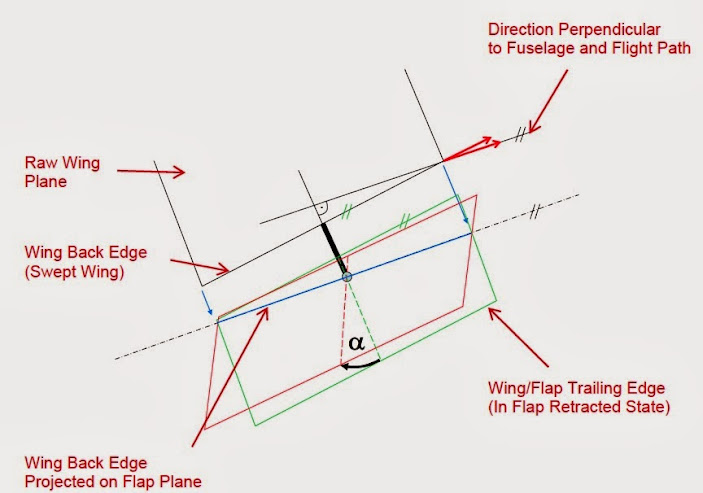
В посте 145, я прокоментировал ваш рисунок из поста 141. Рисунок не сопровождается оригинальным текстом из первоисточника, но можно понять, что при выдвижении закрылков на стреловидном крыле, важно не допускать перекосов в двух направлениях, относительно условной линии, обозначающей правильное положение ПК закрылка (углы “бетта” и “гамма”). Вероятно, это иллюстрация из учебника, показывающая, чего нельзя допускать. В посту 138 на рисунке “В”, я показал механизм для дозированного выдвижения оконечносТЕЙ закрылка. Если, при этом кинематика шарниров одинаковая, развороты на "бетту и гамму “будут отсутствовать, а если специально нужно ввести любой из них, то изменением плеч в нужных звеньях, можно этого добиться.
На досуге просмотрел несколько тем в которых обсуждаются эти проблемы с участием всех участников данной темы, видел выложенные фотографии и понял из чего вытекает ваша проблема. Не думал, что само-собой разумеющееся, вы не применяете. Речь идет о пространственных связях. В любой конструкции подобных узлов (закрылки и т.п.) работающих не на нормальных перемещениях (на стреловидном крыле), связи должны иметь не более одной степени жесткой связи. У вас везде изображены 2-х степенные. Кто то из ваших коллег заметил, что на самолетах со стреловидным крылом на закрылках с рельсовым механизмом направляющие пространственно изогнуты. Такие рельсы при движении закрылка не клинят и не создают перекосов. Раньше разрабатывались только путем многофазовых построений, сейчас можно в 3Д программах САПР.
Для рычажных механизмов тоже необходимо выполнять требование “эластичности” соединений. Попробую изобразить выше сказанное в изометрии.
Наиболее приемлемая схема, для осуществления на моделях. Прямолинейные направляющие синхронно перемещают ПК закрылка на заданную позицию. Радиальные штанги обеспечивают поворот закрылка. Все точки вращения являются сферическими шарнирами. Для минимизации габаритов обтекателей механизма, нижняя точка радиальных штанг смещается аксиально уменьшая “боковое качание” штанг.
На втором рисунке, вариант многорычажной схемы, обеспечивающей работу при любой стреловидности крыла. Специально показаны узлы обеспечивающие 1-степенную жесткость конструкции.
P.S. Любые другие варианты кинематики строятся методами начертательной геометрии или в 3Д программах. Успеха всем.
И еще. В и-нете много графической информации с “недоговорками”, а иногда и по принципу Да Винчи: " Без умоприкладства работать не моГет”
Ребяты, с Новым Годом!
При всем уважении, тема про Ан-74, а закрылки там хоть и довольно сложные по конструкции, но на прямом участке крыла, вообще без стреловидности по задней кромке. Кинематика выпуска у меня будет самая примитивная- как на фото у Константина с “ломающимся” пилоном. Всвязи с этим конструктивный вопрос - чем Вы закрываете щель по верхней поверхности крыла? В убранном положении закрылок вплотную к задней кромке, по мере выпуска отодвигается (хотелось бы подальше). Напрашивается тонкая и довольно широкая полоса по задней кромке, довольно жеская, чтобы поток снизу ее не оттопыривал. Думаю, что щелевой закрылок- сейчас это не наш случай… Пока кроме бальзовой рейки 1-1.5мм толщиной ничего не придумывается.