Квадрокоптер DJI Phantom RFT первой версии

Сорри за, видимо тупой вопрос. Но читая эту ветку на подобное не наталкивался.
Насмотревшись роликов о сопровождении фантомом катеров в море, решили сегодня с товарищем попробовать то же самое с автомобиля. Ну в смысле отправить фантика в полет а самим сзади ехать.
Так вот , ровно через 30 секунд подобного полета, фантик завис на месте над трассой. Хоумлок был выключен GPS включен, по этому коптер просто висел на месте… Секунд через 10 вернулось управление, но не все.
Спуск, подъем, задних ход, поворот. Вперед никак. И так было до перезапуска всей системы.
Первый раз подумали что какая то помеха. Ну или звезды так сложились. Уехали в другое место, попробовали еще раз. То же самое.
Я примерно понимаю физику явления. Это скорее всего из за “защиты от помех” ( она включена ) Но хотелось бы уточнить, кто нибудь с этим сталкивался ? Что нужно выключать, что включать ? И что в реальности происходит ?
Еще раз сорри. Просто фантомчик у меня всего дней 10. Не хочется в слепую тыкаться. (фантом первый p330d, прошивка последняя с ассистента 2.20 )
Имею два коптера. Один - Фантом-1 в корпусе второго с minnazaosd, а второй - на раме Алексея с iOSDMini.
Небо и земля, причем не в пользу DJI. Не навязывая своего мнения, попробуйте сами.
Очень интересно!
Как раз собрался заказывать «iOSD mini» на Фантом1.
Но, прочитав Ваше сообщение, притормозил.
Расскажите подробнее о Ваших впечатлениях о «minnazaosd».
Какие Вы увидели преимущества «minnazaosd» в сравнении с «iOSD mini»:
Какая выводится информация, сложность установки, настройки, вес устройства и пр.
To Ale_xx
У Назы есть функция ограничения полета по дальности. Ставится в ассистенте.
Может, в этом дело?
Это скорее всего из за “защиты от помех” ( она включена )
Первый раз слышу про какую то защиту, или вы что придумываете или мысли свои неправильно излагаете.
И что в реальности происходит ?
Трудно сказать, что именно происходит у Вас, но очень похоже на срабатывание защиты от улетания, то-есть в ассистенте выставлен порог-ограничение дальности. Когда коптер долетает до виртуальной границы, он действительно как бы упирается в невидимую стену.
начал методом тыка выискивать проблему, пришлось выпилить дырочку в карбоне, оказывается карбон влияет на прохождение магнитных волн!

оказывается карбон влияет на прохождение магнитных волн!
Не поверите, он еще и электричество проводит.
Не поверите, он еще и электричество проводит.
так не первый день летаю с этими ногами а проблема вылезла только сейчас
У Назы есть функция ограничения полета по дальности. Ставится в ассистенте
Может, в этом дело?
Мы за 30 секунд успели проехать метров 100 максимум. Второй раз в поле и того меньше. Фантик впереди машины летел метров 10-15.( если по диагонали смотреть )
Когда просто с земли , полет гораздо дальше и без проблем.
я 30 секунд по видео уже смотрел( по таймингу происходящего ) . Оба раза одинаковое время. Именно такое заявлено в защите. Но так или иначе , был ветерок , я в люке “торчал” подруливал. Так что стики не были в одном и том же положении. Вот и не понимаю, что на самом деле происходит. И почему не включается передний ход до перезапуска.
Все-таки посмотрите, стоят ли ограничения по удалению и высоте
Первый раз слышу про какую то защиту, или вы что придумываете или мысли свои неправильно излагаете.
С Соседнего Сайта.
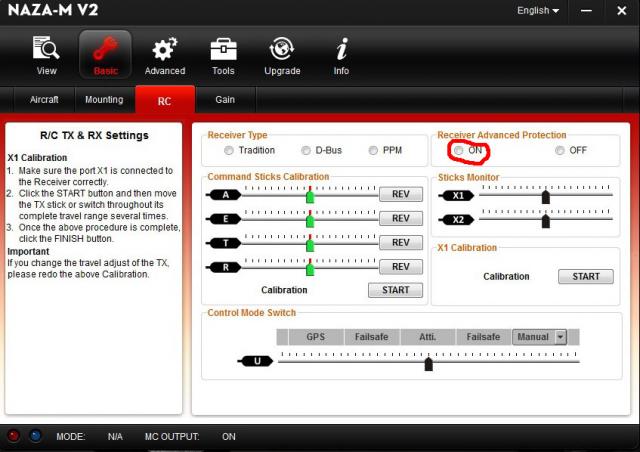
Только надо учитывать следующий момент данной настройки - режима защиты приемника.
Вот что написано по этому поводу в “Ассистенте” (перевод гугла, так что сильно не пинайте):
Если вы включите режим защиты приемника от помех, FailSafe будет срабатывать при возникновении следующих ситуаций во время полета. В соответствии с разницей высоты самолета, есть две ситуации.
- Ниже, чем 100 м, A / E / R канал не находится в нейтральном положении.
- Выше, чем в 100 метрах, A / E / R канал не в нейтральном положении или ручка газа находится выше нейтральной позиции.
В GPS или Atti Режиме полета, если требование 1 или 2 выполняется, и выходные данные каналов A / E / R / T не изменились в течение 20 секунд, то коптер будет парить автоматически. После этого, если выходные данные каналов A / E / R / T до сих пор не трогали стики в течение 10 секунд, система автопилота будет думать, что данные из приемника является ненормальными, а затем войдет в режим защиты от отказов FailSafe.
Мне скорее интересно, как это выключить, что включить ? Ведь летают же люди над морем за катерами управляя с самого катера.
Мы за 30 секунд успели проехать метров 100 максимум.
Хотите сказать, что машина ехала со скоростью три метра в секунду, самим то не смешно. С таким же успехом, вы могли просто идти за Фантомом, легким прогулочным шагом. 😃
Фантик впереди машины летел метров 10-15.( если по диагонали смотреть )
Все правильно, виртуальная граница отсчитывается не от пульта, а от места взлета, так что вы наверняка больше ста метров проехали.
Все-таки посмотрите, стоят ли ограничения по удалению и высоте
2000 метров, по умолчанию.
Странно все как то.
Хотите сказать, что машина ехала со скоростью три метра в секунду, самим то не смешно.
Ну не 2 километра мы проехали, это точно.
100 метров это не дальность, а высота описана в срабатывании зашиты.
Все правильно, виртуальная граница отсчитывается не от пульта, а от места взлета, так что вы наверняка больше ста метров проехали.
Это понятно. Но виртуальная граница ограничена 2 мя километрами.
А эти 100 метров , указанные в описании функции, это если вообще ничего с пульта не меняется. (К примеру стики вперед+вверх и не дышать.)
Как я понял, защита пульта, это если какой то сигнал стабильно поступает не изменяясь в течении 20 секунд , Наза считает что управление перехвачено какой то помехой какого нибудь иного источника. И возвращает коптер.
Наверное я все таки что то не понимаю (( Хотя понимаю, что туплю я, а не машинка.
Мне скорее интересно, как это выключить, что включить ? Ведь летают же люди над морем за катерами управляя с самого катера.
Если коптер не отлетал от точки взлета дальше двух километров и был постоянно в зоне действия пульта, то ни защита от потери сигнала, ни виртуальное ограничение, тут ни при чем, и отключать или включать их бесполезно, надо искать другие варианты.
Наверное я все таки что то не понимаю (( Хотя понимаю, что туплю я, а не машинка.
Попробуйте поставить ограничение дальности другое, например 1000 метров. И взлетайте не в ГПС режиме, а в АТТИ. Ну и откалибруйте аппарат перед взлетом.
Будем искать … Спасибо.
А никто не пробовал на первом фантике эти АКБ? Есть идея подвесить ему такое под брюшко, а то он у меня с камерой, телеметрией и передатчиком на родных АКБ и винтах от второго (правда о-хохо) летает всего минут 6 от силы.

Согласен - с боксом перестарался 😃
Мне сегодня пришел корпус от второго, коробка как о самого коптера, подумал мож перепутали и коптер прислали) в комплекте полный набор болтов еще. www.ebay.com/itm/281242747817 закончились корпуса кстати, как раз буду большой акб подбирать, а так же лопасти 2 и ноги повыше для Тарота www.ebay.com/itm/281270489030 и набор подшипников на всякий случай www.ebay.com/itm/261358490079
Осталось дождаться крышку для отсека батареи, тоже на подходе и вперед.
А никто не пробовал на первом фантике эти АКБ? Есть идея подвесить ему такое под брюшко, а то он у меня с камерой, телеметрией и передатчиком на родных АКБ и винтах от второго (правда о-хохо) летает всего минут 6 от силы.
Где-то я давал уже ссылку на приспособление для такой батареи.
Но, конечно, придется удлинять ножки.
Где-то я давал уже ссылку на приспособление для такой батареи.
Но, конечно, придется удлинять ножки.
Да цена лом!!!Жаба душит.Так то очень конечно хочется такую вещь!!
Синие полоски и красные на корпусе, только в цвете различие? или что то еще означают?
или что то еще означают?
МалчеГ и дЭвочка. 😃