Cheerson CX-20 клон квадрокоптера DJI Phantom

Спасибо за помощь. Приду домой сделаю. Ох не охота новый контролер покупать. Вот такой вопрос: Я калибрую компас дома, и уежаю на природу. У меня нету ноута чтобы его в поле калибровать. Для этого и пользуюсь стоковой прошивкой, чтобы на месте с пульта калибровать. Дальше я по осд смотрю правильно он показывает точку взлёта и не унитазит ли, если все норм то улетаю. Так что лучше не пользовался с пульта? Я думаю что нельзя далеко уезжать от места калибровки. Как быть подскажите?
Вот такой вопрос: Я калибрую компас дома, и уежаю на природу
А вот это хуже. Дома не очень хорошо калибровать компас. Слишком много разных магнитных интерференций. А калибровка со стиков-вещь в себе. Или наоборот, не в себе. Писалось неоднократно.
Неверно откалиброванный компас-причина полёта на всех парах в сторону. Не GPS, а именно компас. Мало спутников GPS КМК может привести к лёгкому рысканью, и не очень точном возврату. А унитаз (а когда он ломанулся вбок, скорее всего это была дуга) это компас.
Сейчас как раз этот вопрос в теме мавика на DJI форуме обсуждают. А я на своём опыте в этом убеждался
Спасибо за помощь. Приду домой сделаю. Ох не охота новый контролер покупать. Вот такой вопрос: Я калибрую компас дома, и уежаю на природу. У меня нету ноута чтобы его в поле калибровать. Для этого и пользуюсь стоковой прошивкой, чтобы на месте с пульта калибровать. Дальше я по осд смотрю правильно он показывает точку взлёта и не унитазит ли, если все норм то улетаю. Так что лучше не пользовался с пульта? Я думаю что нельзя далеко уезжать от места калибровки. Как быть подскажите?
Компас у тебя где прикреплен?
Я думаю что нельзя далеко уезжать от места калибровки. Как быть подскажите?
Многие здесь калибруют в поле и потом летают весь сезон, не зависимо от места положения ± 200км. еще желательно размагнитить этот компас перед калибровкой - многим это помогло, и оффсеты стали на много меньше. В часовой мастерской можно, хотя в Самаре не нашел размагничиватель в часовых…
А вот это хуже. Дома не очень хорошо калибровать компас. Слишком много разных магнитных интерференций. А калибровка со стиков-вещь в себе. Или наоборот, не в себе. Писалось неоднократно.
Неверно откалиброванный компас-причина полёта на всех парах в сторону. Не GPS, а именно компас. Мало спутников GPS КМК может привести к лёгкому рысканью, и не очень точном возврату. А унитаз (а когда он ломанулся вбок, скорее всего это была дуга) это компас.
Сейчас как раз этот вопрос в теме мавика на DJI форуме обсуждают. А я на своём опыте в этом убеждался
Я же там дальше с пульта включил возврат и он вернулся. Кароче нужно тестить. Ибо с пульта возврат работает .
Компас у тебя где прикреплен?
Как положено в башне. Компасмот раньше делал что помню вроде 4-8 результат.
Я же там дальше с пульта включил возврат и он вернулся. Кароче нужно тестить. Ибо с пульта возврат работает .
Как положено в башне. Компасмот раньше делал что помню вроде 4-8 результат.
Компасмот тоже не желателен. Нужно только там отклонения посмотреть. Если у тебя 4-8 это отличный результат. И компасмот ненужен.
Сделал сброс настроек full parameter list - reset to Default
Потом, перезапустил коптер> загрузил сток параметры
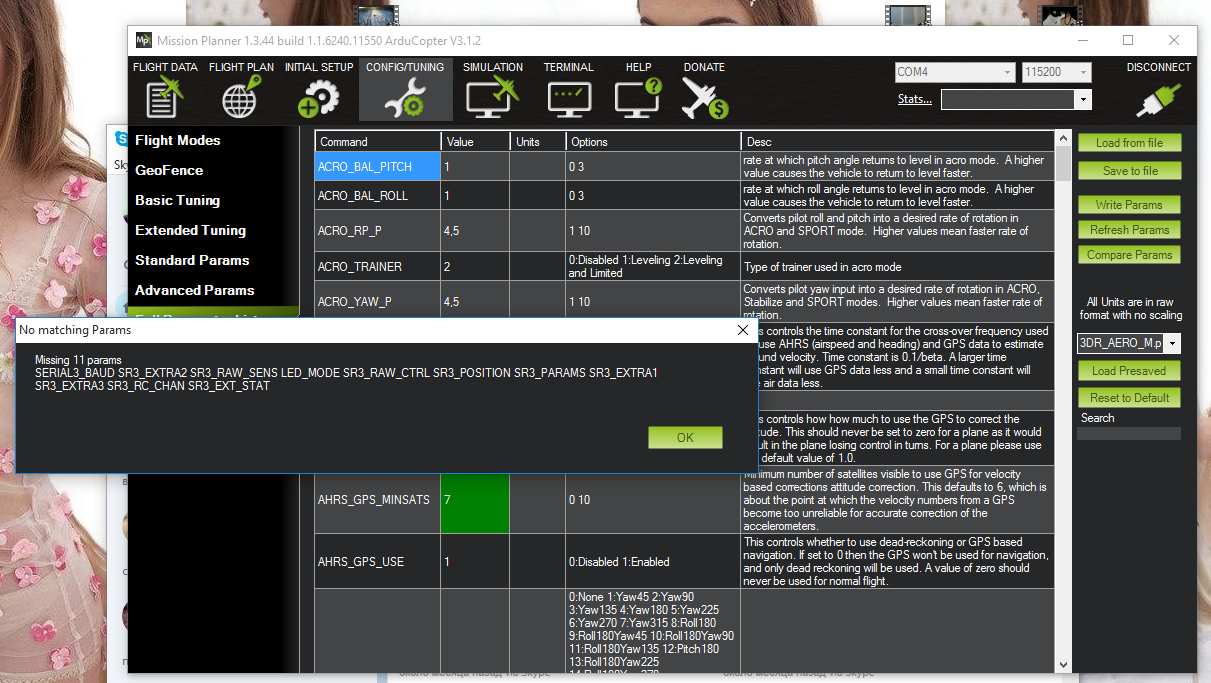
Всеправильно сделано? Меня окно остерегает, типо не хватает параметров.
Всеправильно сделано? Меня окно остерегает, типо не хватает параметров.
все правильно! так и будет… теперь подключи и проверь аппу…
Потом, перезапустил коптер> загрузил сток параметры
Кнопку write params не забыл нажать?😃
Кнопку write params не забыл нажать?😃
Да, спасибо, сохранил, и как фаил тоже, на будующее. Кстати когда я нажал reset to Default и перезапустил коптер, он пищал как будто на нём нету прошивки, значит вроде почистило все.
Заного вручную настроил параметры свои параметры по мелочам с которыми я привык летать:
RTL_ALT 5000
RTL_LOIT_TIME 5000
ANGLE_MAX 3500
FS_THR_VALUE 976
WPNAV_LOIT_SPEED 700
WPNAV_SPEED_DN 200
LAND_SPEED 50
RTL_ALT_FINAL 0
BATT_VOLT_PIN 13
WP_YAW_BEHAVIOR 1
он пищал как будто на нём нету прошивки
Калибрани аппу в МП и пищать перестанет:)
Дмитрий, подскажи где именно взять параметр LOGGED_MAN при расчете поправки датчика тока?
Сегодня получил FPV-приемник который напрямую в смартфон втыкается. Работает. В VR-шлеме вполне удобно всё, только смартфон туда запихивать муторно. Ещё плюс - сам девайс очень тоненький - отлично подойдёт для встройки куда-нибудь, например в аппу. В поле ещё не испытывал, может завтра, но по квартире проверил. Задержка конечно заметна, но для неспешных полетов вполне приемлема. Не получилось пока стравить с Tower - он его видит, но сразу вылетает - не пойму почему, другие проги работают нормально. В целом вещица интересная, посмотрим как у неё с качеством приема.
Сегодня получил FPV-приемник который напрямую в смартфон втыкается.
Мой в пути ещё. Качество картинки если с монитором сравнивать лучше? Тоже интересует видео в Tower вместе с телеметрией по блютузу.
Качество картинки если с монитором сравнивать лучше?
Однозначно, особенно в VR-шлеме. Как приемник пока не ясно, но вот сама картинка отличная!
Тоже интересует видео в Tower
С Tower подружить пока не удалось - вылетает Tower с подключенным приемником и всё тут! FPVViewer использую - отличная программа!
особенно в VR-шлеме
Забавно, что как только одел шлем, сразу интуитивно начал крутить головой как-будто хедтрекер установлен, а его-то нет! ))) Эффект от картинки потрясающий!
пришел аккум. внешне не плох, в отсек входит со свистом. влезет даже без поднятия платы
Пока отпаял сгоревший мотор, решил подключить коптер в миссион планер. Подключил, он там определяется, всё ок, попытался логи скачать - не смог, может что-то не то нажал. В общем, теперь при включении(с 3мя моторами) один мотор пищит постоянно. Причем он при включении проигрывает ритм, но не проигрывает мелодию. Что я мог сделать не так? Пробовал поменять местами штекеры регулей, безрезультатно, хоть отключай. Кстати, если отключить, остальные пищат так же.
Уменьшил маленько пиды, вроде чуть-чуть стало меньше дрожи, но всё равно просится цифровая стабилизация. Дальше наверно нужно лезть в пиды подвеса.
пришел аккум. внешне не плох, в отсек входит со свистом. влезет даже без поднятия платы
а вес то, а вес???! Стоит ли апгрейдить старые black magic 3000 ?
Пока отпаял сгоревший мотор, решил подключить коптер в миссион планер. Подключил, он там определяется, всё ок, попытался логи скачать - не смог, может что-то не то нажал. В общем, теперь при включении(с 3мя моторами) один мотор пищит постоянно. Причем он при включении проигрывает ритм, но не проигрывает мелодию. Что я мог сделать не так? Пробовал поменять местами штекеры регулей, безрезультатно, хоть отключай. Кстати, если отключить, остальные пищат так же.
Так и будет пищать пока все моторы на месте не будут. Если хочешь чтоб пока не пищал отключи питание контролера, оно идёт от преемника в первый канал контролера, чёрный и красный провод, белый оставляешь на месте. Питание контролера пойдёт через usb. Аккум естественно не надо подключать. Вот так можешь по настраивать свой контролер пока моты не приобретешь!
Так и будет пищать пока все моторы на месте не будут.
Может я не так описал, вот оно:
Именно 1 мотор пищит. Когда присоединяю к ПК без аккума пищит по другому и видимо пищалкой. А тут сам мотор.
заряжал в режиме charge. по банкам все ровно. осталось испытать в полете