Cheerson CX-20 клон квадрокоптера DJI Phantom

Конечно поддерживает, иначе в Tower его-бы не было. Что пошло не так, можно только по логу попробовать определить.
Логи по умолчанию вроде не пишутся, нужно активировать какую-то функцию в МП? Ткните носом пож, чтобы не искать.
Логи по умолчанию вроде не пишутся, нужно активировать какую-то функцию в МП? Ткните носом пож, чтобы не искать.
В Full parameter list ищешь LOG_BISMARK (не помню точно как называется, ну там не ошибешься) и ставишь цивру соответствующию параметрам, которые тебе необходимо включить. 830 - стандартный набор, 958 - стандарт + вибрации, остальными не пользовался.
В Full parameter list ищешь LOG_BISMARK и ставишь цивру соответствующию параметрам, которые тебе необходимо включить. 830 - стандартный набор, 958 - стандарт + вибрации, остальными не пользовался.
зачем такие сложности то?
не проще ли просто в настройках кликнуть на нужные опции
зачем такие сложности то?
не проще ли просто в настройках кликнуть на нужные опции
Проще, кто знает какой параметр что показывает! Не все ж здесь такие знающие!
Только что глянул, у меня LOG_BISMARK - 894, скачал лог. Кто глянет? yadi.sk/d/97-lf9wN3GxEbe
:)А там поставил циферку и они все включились!
Только что глянул, у меня LOG_BISMARK - 894, скачал лог. Кто глянет? yadi.sk/d/97-lf9wN3GxEbe
Загрузи на arduplotter!
:)А там поставил циферку и они все включились!
Загрузи на arduplotter!
Только что глянул, у меня LOG_BISMARK - 894, скачал лог. Кто глянет? yadi.sk/d/97-lf9wN3GxEbe
По логу видно был скачек HDOP выше 2-х, и вылезла ошибка полетного режима. Возможно из-за этого он у тебя и не полетел в режиме Circle
Проще, кто знает какой параметр что показывает!
ага, а цифры ещё больше говорят, что за ними скрывается 😃
😃
ага, а цифры ещё больше говорят, что за ними скрывается
Так здесь сто раз писали что они означают!!
По логу видно был скачек HDOP выше 2-х, и вылезла ошибка полетного режима. Возможно из-за этого он у тебя и не полетел в режиме Circle
До переключения в режим Circle летал в режиме Guided, я чо-та думаю эти режимы одни и те же датчики используют. При полете в Guided никаких проблем не было, только переключил в Circle - начались 😃 Или лучше взлетать сразу в режиме Circle, а не переключаться в полете?
Так здесь сто раз писали что они означают!!
цифры - это сумма весов этих битовых опций
сегодня у разработчиков одно, завтра в другой версии может быть другое, зачем подходить из-за угла, когда есть MP, есть опции, кликаем и сумма формируется автоматически в зависимости от текущей ситуации, что там непонятного в названиях опций - непонятно, IMU - это акселерометр и гиро, COMPASS - компас, ATTITUDE - положение в пространстве, GPS и знать не нужно, PM - питание, также есть документация на APM, там всё прекрасно расписано, речи про циферки вообще не ведут, так как цифры - это уже следствие суммы опций, т.е. все комбинации долго перечислять, их много
вы запомнили пару цифр, но это строго определённый набор опций, а если я хочу отключить одну из пяти, например, всё - такой цифры нет больше у вас
Или лучше взлетать сразу в режиме Circle, а не переключаться в полете?
Это не имеет значения.
Неоднократно переходил в этот режим с разных : Althold, Loiter, Pposhod. Всегда результат предсказуем. Если перед этим унитаза и дрейфа не было, нормально летал и по кругу.
Всё же даже при полётах в Tower желательно аппу держать на готове. Если что пойдёт не так, переключаешься на Althold и садиш руцями. Ибо если электронику штырит (я не говорю об ИМУ), то только так можно не упасть.
Я к примеру не увидел в логах ничего ужасного. HDOP выше 2? Да, мог быть унитаз небольшой. Но ронять он не должен коптер.
Попробуй повисеть в Althold. Посмотри как справляются гироскопы с удержанием в плоскости. Потом в Loiter (метрах в 5-7 над землёй)
Прежде чем пускать на автомате, желательно понять есть ли слаженная работа систем в целом
И кстати, если при первом взлёте есть небольшой унитаз, не спеши калибровать. Посади, отключи секунд на 10 батарею, подключи и попробуй ещё. Кстати, КМК, провода с разъёмом от батареи стоит укладывать как можно ниже, ближе к полу отсека. Может шаманство. Но мне показалось, дрон ведёт себя стабильнее так.
Привет всем! Гонял тут на встречу по коптерам и там ради интереса опробовал спец. приблуду для размагничивания компасов dji, захватил с собой компас от своей новы. Честно говоря, запамятовал оптимальные значения, но стало так. Вроде как не худо.
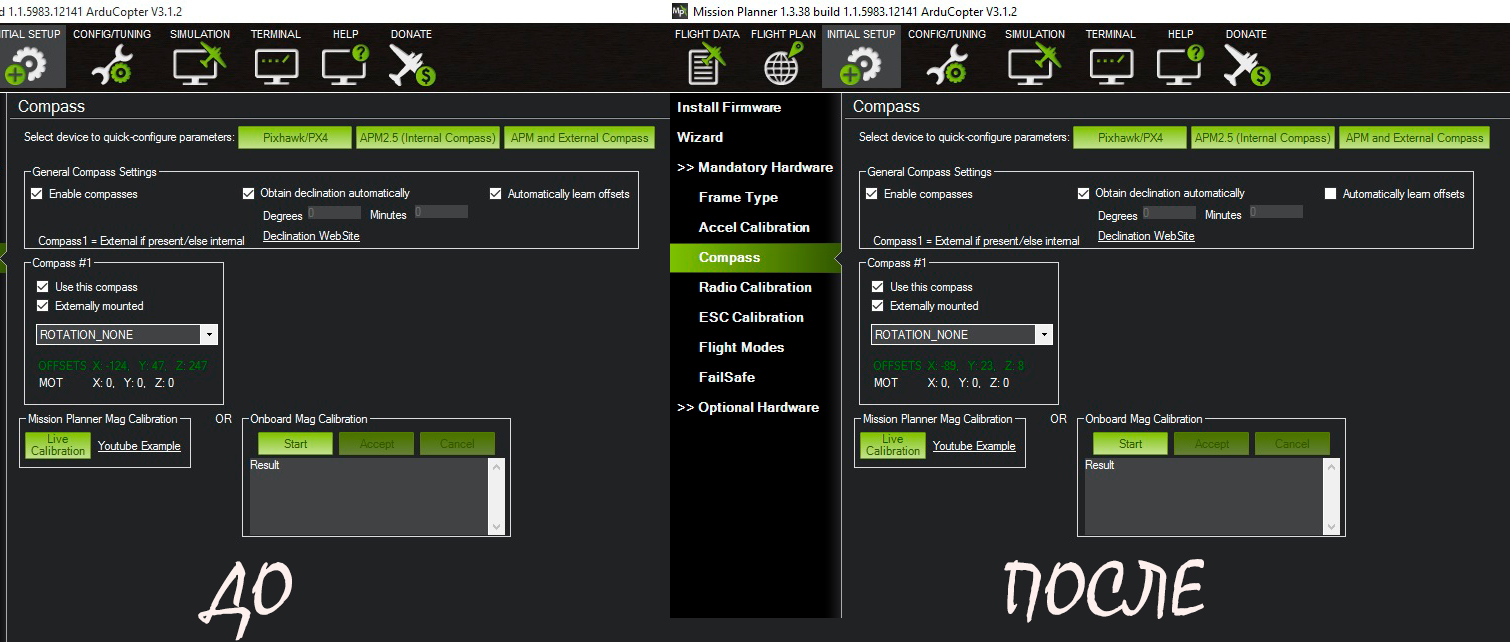
Честно говоря, запамятовал оптимальные значения, но стало так.
пережата картинка, не видать…
пережата картинка, не видать…
Поправил.
Было X:-124 Y: 47 Z: 247. Стало X:-89 Y: 23 Z : 8
Поправил.
Было X:-124 Y: 47 Z: 247. Стало X:-89 Y: 23 Z : 8
оптимально К НУЛЯМ!
Что за приблуда-то?
Что за приблуда-то?
Не реклама, если что. На ф3 тоже размагничивал. Горизонт валило нещадно. У фантомов эта проблема очень актуальна. А за компанию решил на нове. Еще в поле откалибруюсь и должно вообще хорошо быть. Они по сути, запихали размагничиватель в удобный формат. Не надо никаких петель и мастерских. Ценник при предзаказе был около 2800.
Вот так валило на фантике. Сейчас все ок. Сорри за оффтоп не по теме
Не надо никаких петель и мастерских. Ценник при предзаказе был около 2800
Так это и есть “петля”…такая-же хрень на али стоит 500 рублей, только она от 220В работает, а эта от фантомовского акума. Но идея хорошая. Для владельца фантома 2800 не деньги.
Кто может глянуть сегодняшний лог? Отлетал вроде ничего через Tower на 30м по точкам, спустя 6 минут коптер начал пищать, сигнализируя о севшей АКБ и уже как-то сложно ему стало летать, плохо справлялся с ветром, подлетел к себе и нажал RTL, его начало унитазить конкретно на высоте 30м, радиус был около 25-40м. В итоге начал снижать высоту полета вручную в Tower по 5 м, радиус унитаза начал сокращаться в итоге когда коптер был метрах на 10 от земли, нажал ещё раз RTL, он кое-как сел, но естественно перевернулся. Почему был такой жесткий унитазинг, после того как просигнализировал о низком заряде? GPS стоит BN-880. Летал с подвесом Storm 32 и камерой, вроде и время полета 6 минут как-то маловато(
arduplotter.com/view/58f237d3b08ceaa84c369a1f