Cheerson CX-20 клон квадрокоптера DJI Phantom

Теперь криво работает удержание позиции и “возврат домой”. При удержании позиции коптер начинает наварачивать круги вокруг точки зависания
Классический “унитазинг”. Калибровать компас, гироскопы… строго по инструкции. Стр 200. там - много ссылок.
Классический “унитазинг”. Калибровать компас, гироскопы… строго по инструкции. Стр 200. там - много ссылок.
Спасибо! Буду смотреть.
Добрый день. Наконец-то дочитал всю ветку, пока читал приехал мой чирсон. Разобрал, все посмотрел, собрал, подключил к MP. И вот у меня как-то странно выглядит окно MP. В скринах у всех вижу больше кнопочек сверху нежели чем у меня. Они как-то дополнительно активируются? Во вложении скрин моего окна MP
подключил к MP
У вас установлен apm planner. а спрашиваете про Mission Planner.
У вас установлен apm planner. а спрашиваете про Mission Planner.
под Mac нашел только AP. А есть под мак и MP?
подходит для стоковой аппаратуры?
Да, сегодня такой примерял
Вопрос - на подходе - OSD к Chersson CX-20 имею OSD REMZIBI с USB адаптером - вопрос - подойдет адаптор к OSD которую жду или заказывать какой то другой?
Сегодня собрал свой FPV монитор. Сам экран брал этот
Он шёл вместе с креплениями, и вот как он смотрится на аппаратуре:


Комплект приёмник и передатчик использовал эти:
Вот вид сзади монитора, с закреплённым передатчиком и самодельным 3S аккумулятором

Аккум висит на липучке, что бы можно было снимать на зарядку

Собрал его из 3 штук 18650 в китайском кредле
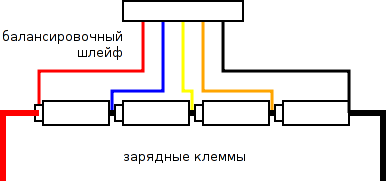
Балансировку сделал по схеме
Вот так выглядит живьём:

Сзади наклеил резинки, что бы не скользил. Теперь совсем не болтается
Оставил длинный балансировочный кабель что бы удобно было заряжать, кроме того, когда придут DC-DC преобразователи, запитаю ещё и аппу от этого шлейфа.

Вот показан процесс его зарядки и балансировки:

Теперь осталось установить передатчик на коптер, и учится летать по FPV. Как немного научусь, поставлю подвес G2-D. Пока что думаю как его переделать под Mobius по аккуратнее.
Сегодня собрал свой FPV монитор.
вот вся эта конструкция из рук не выпадает?)))
балансировка же нарушена и на шнурке уже ровно висеть не будет.
или все не так страшно?
Прошу помощи советом. В связи с крашем полностью разбирал чирсон, с отпайкой всех регулей и моторов. Вчера собрал его, расположил моторы по данной схеме:

вот мое подключение регулей (пп - передний правый, пл - передний левый, зп- -задний правый, зл - задний левый):

подключал провода моторов к регулям исходя из этой фотографии:

В итоге собираю квадр, подключаю к контролеру, запускаю, и у меня оказывается что три мотора крутятся против часовой стрелки, а один только по часовой. Регуляторы: спереди стоят зеленые, сзади красные.
В итоге собираю квадр, подключаю к контролеру, запускаю, и у меня оказывается что три мотора крутятся против часовой стрелки, а один только по часовой.
Ответ 100500 раз в теме был - неправильно припаяли моторы к регулям.
Для смены направления вращения поменяйте местами два ЛЮБЫХ провода мотора. Правильные направления вращения моторов указаны на верхней крышке корпуса.
Цвет диодов на направление вращения, естественно, никак не влияет. 😁
Ответ 100500 раз в теме был - неправильно припаяли моторы к регулям.
Для смены направления вращения поменяйте местами два ЛЮБЫХ провода мотора. Правильные направления вращения моторов указаны на верхней крышке корпуса.
Цвет диодов на направление вращения, естественно, никак не влияет.
Это первое что пришло в голову, но у меня провода подпаяны так, как они были первоначально (как на фотографии разобранного квадррика). То есть по идеи они должны правильно вращаться.
два ЛЮБЫХ провода мотора.
то есть можно поменять не только крайние провода (красный/желтый), но и черный?
Купил новый коптер, разобрал его, а там один провод припаян но отрезан. Это такая задумка китайцев или косяк? Летать еще не пробовал. 

- Как определить, что у меня за версия? В круглой антенне только компас, есть usb удлинитель на дно корпуса, при подключение к mission planer не видит коптер.
а там один провод припаян но отрезан.
Это норма
что у меня за версия
Open source
вот вся эта конструкция из рук не выпадает?)))
балансировка же нарушена и на шнурке уже ровно висеть не будет.
или все не так страшно?
Конечно пульт стал тяжелей, и ЦТ сместился. Я к этому был готов. На шнурке вполне комфортно висит, а как покажет себя в полёте, посмотрим. Штатив конечно легче, но так информативнее.
Конечно пульт стал тяжелей, и ЦТ сместился. Я к этому был готов. На шнурке вполне комфортно висит, а как покажет себя в полёте, посмотрим. Штатив конечно легче, но так информативнее.
Проходил эту стадию. 😃 В итоге перешёл на самодельную “видеомаску” (в очереди на покупку очки) либо экран на штативе - экран на пульте таки неудобно.
экран на пульте таки неудобно
Не соглашусь. ИМХО - удобно.
Отчет по 3D шасси - 10% заполнение , слой 0,1 мм , вес 43 грамма ( чуть доработал нажачкой срединения.
Отчет по 3D шасси - 10% заполнение , слой 0,1 мм , вес 43 грамма
Ну тогда уж уточните - сколько нитей “контура” и сколько слоёв “крышки/донышка” 😃
Проходил эту стадию. В итоге перешёл на самодельную “видеомаску” (в очереди на покупку очки) либо экран на штативе - экран на пульте таки неудобно.
… У меня на мониторо-комбайне ещё и ФПВ - чЮЙствительность упала в разы - видно близкорасположенные антеннки “забивались” супермощностью родного передатчика. А высоко поднимешь - носить неудобно или солнце засвечивало.
В итоге перешёл на самодельную “видеомаску”
Думал над этим. Смущает отсутствие визуального контроля коптера. То есть видим только “его” глазами. А опыта пока что маловато. Посмотрим как будет в полётах. Шнурок здорово снижает неудобство. Точнее лента на шею, а не шнурок. Ибо конструкция тяжёлая. Позже взвешу.