Cheerson CX-20 клон квадрокоптера DJI Phantom

После установки камеры/передатчика занялся OSD, установил Micro Minim OSD.
Обошел отсутствие в родном ПК датчика напряжения с помощью входов на этом OSD, заодно и БЕК мониторю.
Прошил MinimOSD-Extra, все работает кроме счетчика спутников. Вышел на улицу, подождал, зеленый индикатор загорелся, а в OSD по прежнему 0.
В чем может быть проблема?
В плохом чтении темы про настройку модуля осд и апм в МП)
В плохом чтении темы про настройку модуля осд и апм в МП)
А чуть более конкретно? Телеметрия работает, в МП спутники видятся.
Upd
Подсказки хватило, все заработало.


Дятьки , как то можно изменить параметр срабатывания пищалки на родной power board.
Сначала ничего понять не мог - родной аккумулятор, летал и садился после того как бортовая пищалка визжать начала. Потом заряжаю зарядкой imax b6ac и пипец вместо 2700 вливается 1600-1700. Думал аккум здыхает но вроде даже не дуется и теплый после полета. Начал разбираться - оказывается визги бортовой пищалки начинаются у меня с запасом в 30-35% остатка примерно.
Определил этот момент когда к балансировочному разьему подцепил отдельный датчик с пищалками.
В итоге после начала визгов бортовой пишалки висел еще пару минут пока не начала красным загораться пищалка на балансировочном разьеме
Или так оставить нафиг?!!!
насколько я помню - не регулируется.
а вообще вылетывать 75-80%, а не 100%, номинала батареи это нормально. в противном случае батарея долго не проживет…
Дятьки , как то можно изменить параметр срабатывания пищалки на родной power board.
Я уже давно не обращаю внимание на неё вообще - только OSD или телеметрия на AT9.
ну не знаю… у меня пищать начинает на 10.3 вольт… сажусь раньше)
Каким параметром можно снизить скорость поворота по yaw? Не нравится, что коптер очень резво реагирует на стик. Пробовал в аппе экспоненту - не то, выходит сначала почти не крутится, а потом опять резко. Нужно просто скорость поворота уменьшить.
попробуйте уменьшить "расход " по каналу. Возможно ли это на стоковой аппе не знаю на “нормальных” - не вопрос
попробуйте уменьшить "расход " по каналу. Возможно ли это на стоковой аппе не знаю на “нормальных” - не вопрос
Ну аппа-то у меня не стоковая (AT9), но в мануале по настройке APM указано, что расходы должны быть 100%…но попробую.
Каким параметром можно снизить скорость поворота по yaw?
ardupilot.org/copter/docs/tuning.html
As mentioned on the Stabilize mode’s tuning section, the ACRO_YAW_P parameter controls how quickly copter rotates based on a pilot’s yaw input. The default of 4.5 commands a 200 deg/sec rate of rotation when the yaw stick is held fully left or right. Higher values will make it rotate more quickly.
и так, поставил и я BN-880…
теперь вопрос…
На подоконнике ловит 5 спутников (1 этаж) мой оригинальный так же ловил, иногда даже больше… Надо че в настройках через Ю центр менять? глонасс у него включен по умолчанию? чет мало спутников…Где глонасс то? а ведь там еще и бейду китайские есть…
На подоконнике ловит 5 спутников (1 этаж)
а на улице сколько, если > 12, то точно глонасс подключился
а на улице сколько, если > 12, то точно глонасс подключился
не проверял… там ДУЕТ))) но в Юцентре вижу иконки рашен спутников… че надо менять или нет?
не проверял… там ДУЕТ))) но в Юцентре вижу иконки рашен спутников… че надо менять или нет?
так если рашен иконки есть, значит маячат где-то и он их чует 😃
а толку конфигурить, когда мы ранее выяснили, что контроллер всё равно сам потом конфигурит под себя
че надо менять или нет?
Нет. Надо просто на улицу и летать! Ну ещё можно в конфиге МП выбрать u-blox и pedestrian, но это на любителя - и по-дефолту работать будет нормально.
там ДУЕТ)))
Погода - вообще жесть в Москве… я уже надежду теряю полетать-то!
Ребят, вопрос. Собрал я этот многострадальный коптер, попытался его запустить (откалибровав и настроив все, что советовали в первых 105 стр этой темы))))).
Дождались gps (включена стенка), заармились, завелись, неуверенно (с раскачкой, хотя ветра не было толком) взлетели в стабе на высоту в сантиметров 40-50 (ибо сразу было непонятно как и чего будет, поэтому никуда я и не торопился), после чего кувыркнулись через луч и шмякнулись ногами кверху. Один из винтов (передний А) потерял примерно 2/3 одной лопасти, при том, что стояли защиты. Т.к сами винты изрядно б/у и в хз каком состоянии (как и весь коптер), судя по логу, я предполагаю, что произошло разрушение пропеллера, а потом коп кувыркнулся через этот луч. Помогите понять так ли это ну или тыкните куда смотреть, если я не прав.
По крайней мере, мы зуззим и почти летаем, что для куска пластика с обрывками проводов, кторые мне достались изначально - уже вполне себе результат))))
По крайней мере, мы зуззим и почти летаем, что для куска пластика с обрывками проводов, кторые мне достались изначально - уже вполне себе результат))))
блин, лог залей на beta.arduplotter.com/upload а ссылку с него сюда дай… нахрена какие то ЗИПЫ?
и че это ты взлетал без спутников? нет ИХ! ни одного!
заармились, завелись, неуверенно (с раскачкой, хотя ветра не было толком) взлетели в стабе на высоту в сантиметров 40-50
Снимайте ноги, ставьте зимнюю резину и губку на дно на скотч, на первые 400 полётов. Взлетать с резинового коврика (а не с песка или лужи или люка). Взлетать в стабе, но подпрыгивать ЧЮть по-резче сразу на 10 метров и газ с перепугу не сбрасывать.
Добиться от рук удерживать высоту. Повисеть пол-часа только на этой высоте и на расстоянии 10ти метров от себя , и аккуратно приземлиться в 10ти метрах от себя. Повторить 200раз в безлюдной пустыне - без деревьев, домов и людей 😃.
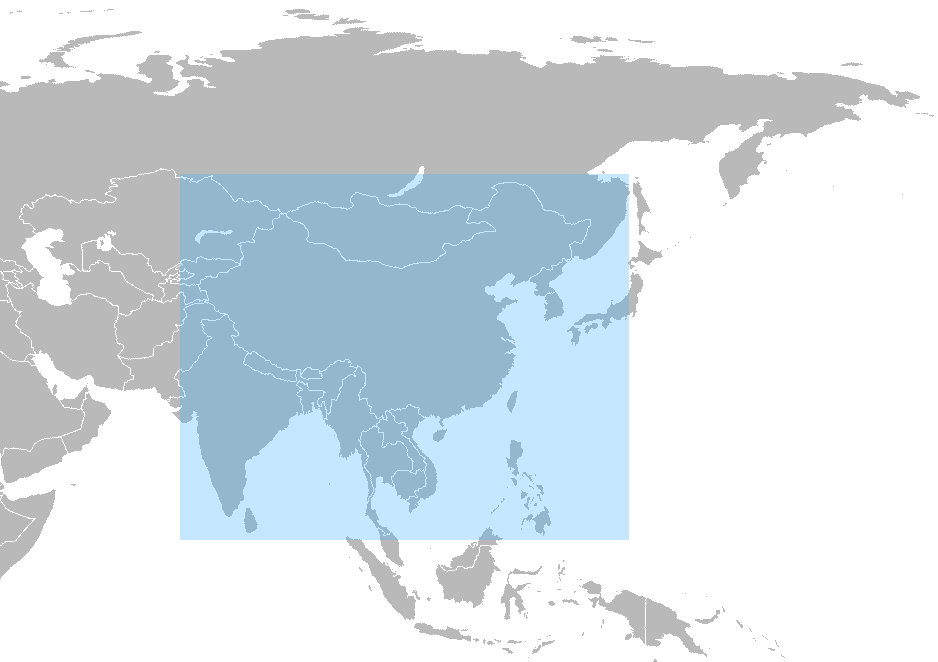
а ведь там еще и бейду китайские есть…
Вы серьезно собираетесь китайские спутники в Москве ловить?
Они как бы на геостационарных орбитах висят… и висят они, как ни странно, над китаем.
Будет GPS, будет немного Глонасса, про Бэйдоу и другие спутниковые системы можно забыть.
Вот, например, зона покрытия Бэйдоу:
Я от 880 несколько месяцев ждал, когда ж он начнет хотя бы 15-17 сателитов ловить, он не начал. 11-13 в хорошую погоду, из них 8-9 GPS, остальные Глонасс. Посмотреть это можно через ю-центр.
вижу иконки рашен спутников
Это и есть глонасс.
У меня в Москве стабильно 18-20 спутников. Но это после того, как я ему сделал сброс на дефолт через ю-центр. У других сразу так работал.
и че это ты взлетал без спутников? нет ИХ! ни одного!
Ага, уже посмотрел, и это очень странно.
Стоит геофенс (50м/150м) и HDOP 220 - оно бы не дало заармится без спутников, да и огонек зеленый горел 😵
Плюс из дома на ноуте МР вчера показывал карту с корректной точкой взлета. В общем - ничего не понимаю (с)
Кто-нибудь может быть подскажет куда копать?
ЗЫ: Ног у коптера нет в принципе - т.к коптер мне достался битым до состояния горы обломков с кучей оборванных проводов, а новые ноги и тарелку на крышу мне пока не напечатали (обещали к среде закончить) - так что взлетал с коробки, а вместо корпуса для гпс и компаса самолепная коробушка из пластиковой банки))).
Может просто в лог не записались эти данные?
Ног у коптера нет в принципе
…и взлетали вы осторожно-плавно - поэтому (возможно) у самой земли 40-50 см его и колбасило. После 2-3х метров высоты должно полегчать - по-стабильнее будет.
вместо корпуса для гпс и компаса самолепная коробушка из пластиковой банки
У меня компас прекрасно живёт в прозрашке из-под обуви за 20руб - там, ОЧ. к стати оказалась раздельная поворотная крышка - мозг внизу, а крышка вверху. Можно “офсеты править” 😃.
Давно логи не включал - будет лог спутники показывать, если они в логах выключены?
И еще вопрос.
Подцепил коптер к компу на работе (GPS тут не берет - надежно построено здание). В первой закладке скачут значения высоты (1,46-2,03м), yaw (256,50-256,61) и вертикальной скорости (-0,04-0,05). Это нормально или не очень?
Из замеченного - на пластиковом корпусе мозга (как я понял) в районе бародатчика выломан квадратный кусок пластика (похоже, что там была дверка или типа того и ее довыломали) - может быть в этом проблема? Паралонка на бародатчике есть, вроде как родная (черная такая, крупноячеистая). И если в этом дело - то чего делать? Клеить изоленту поверх?
И еще вопрос.
Подцепил коптер к компу на работе (GPS тут не берет - надежно построено здание). В первой закладке скачут значения высоты (1,46-2,03м), yaw (256,50-256,61) и вертикальной скорости (-0,04-0,05). Это нормально или не очень?
Из замеченного - на пластиковом корпусе мозга (как я понял) в районе бародатчика выломан квадратный кусок пластика (похоже, что там была дверка или типа того и ее довыломали) - может быть в этом проблема? Паралонка на бародатчике есть, вроде как родная (черная такая, крупноячеистая). И если в этом дело - то чего делать? Клеить изоленту поверх?
Ничего не делать… Это нормально… В логах ещё IMU включи, вибрации посмотреть… В МП параметр надо поменять, с 830 на 958… И да, компас адекватно показывает? Оффсеты какие? И логи бывает глючат, не все данные пишут,…