Xiaomi FIMI A3

Нашёл вот такую штуку:
…главное снизу открытый и очки для зрения можно одеть. Да и солнце не всегда бывает. Предпочитаю контролировать окружающ. обстановку потому как летаю один…
Может тогда просто монитор удобнее? В тканевый “перископ” - и голова свободная и солнце нипочём и полный контроль…
Устранил причину глюка когда пульт показывал только 9 спутников.
Как всегда. Где контакт нужен - его нет, где не нужен - он есть…
Коаксиальный кабель от трансмиттера к новой внешней антенне имел плохой контакт с землёй платы ( микроразъём).
130 мвт на 2.4 ггц гуляли внутри корпуса и скорее всего затыкался приёмник GPS.
Сейчас пока работает, сбоев не видно. Время покажет.
В качестве антенны использую спираль полусферическую для мавика с левой поляризацией.
У неё усиление 16 дбм и сзади рефлектор, который экранирует задний лепесток.
Приёмник GPS находится сзади и если всё нормально, то на него в отличии от диполей почти не попадают гармоники от 2.4 ггц.
В качестве антенны использую спираль полусферическую для мавика с левой поляризацией.
Вот бы фотку антенны увидеть.
Дособирал сегодня таки корпус, очень много правок и изменений по ходу производства, но вот он, Фимка в кастомном корпусе!
Вот бы фотку антенны увидеть.
Вот фотки пульта.
На сколько увеличился вес коптера?
В оригинале моторы передние к задним имеют небольшой выкос.
А, а я думал вы на дрон какие-то еще антенны поставили.
Вес с кастомной рамой примерно на 60 гр. больше.
А, а я думал вы на дрон какие-то еще антенны поставили.
На коптере грибок так как у Рамзеса rcopen.com/forum/f135/topic531239/1642
На 2.4 ггц оставил штатную, потому что спиральная для мавика которая на пульте имеет большое усиление при довольно широкой диаграмме.
Доп монитор нормально показывает даже при прямом солнце.
Замерил мощность на выходе видео передатчика
Замерил мощность на выходе видео передатчика
Что то вроде маловато, а где обещанные 130mw. Или я что то не так понимаю, 130 это на 2,4?
Что то вроде маловато, а где обещанные 130mw. Или я что то не так понимаю, 130 это на 2,4?
Там же снимок приложен что 5.8 23.20 MW - видео передатчик. 4pda.ru/forum/index.php?showtopic=953452&view=find…
Подробности тут:
4pda.ru/forum/index.php?showtopic=953452&view=find…
130 мвт на 2.4 управление - обещаные 😃
Там же снимок приложен что 5.8 23.20 MW - видео передатчик.
Снимок видел, просто по простоте душевной думал, что и видео должно быть примерно одинаковым с 2,4 каналом, а не в 4 раза меньше, оказывается инженеры Фимки решили что и этого хватит.😃
Сегодня в обед провел очередное испытание. И оно оказалось успешным! К сожалению, был сильный порывистый ветер и далеко я лететь не решился, но не из-за того, что дрон сейчас на самодельной раме, я бы не решился и в фабричном корпусе его далеко отпускать.
На этот раз я убедился что видео-антенна закручена хорошо и не открутится. По факту, связь дрона с пультом ни разу не терялась, я всегда мог его направить куда мне надо и безопасно посадить. Умные режимы также работали, видеозапись и на дроне и на пульте работала без перебоев. Были и кое-какие неприятные моменты. Во-первых, дрон очень долго не мог найти достаточно спутников для взлета в режиме GPS. И второе, один раз в воздухе спутников стало 8 и пульт пропищал о переходе в режим ATTI, т.е. в удержание высоты. Также пару раз высвечивалась надпись о помехах компасу и совет летать осторожно. Возможно потому что на этот раз я не стал проводить калибровку компаса, а локация была довольно далеко от того места, где я последний раз его калибровал. Испытания сегодня проводились в городских условиях, примерно в 120-150 метрах от двух вышек сотовой связи, не самое лучшее окружение.
Время полета было примерно вдвое меньше обычного (см. фото), дрон управлялся чуть резче, чем было на фабричном корпусе. В остальном все стандартно. Неудачу предыдущего испытания списываю на то, что видео передатчик, оставшись без антенны, создал помеху и каналу управления и GPS-приемнику, что и привело к крашу.
Как мне кажется, важно, привести плюсы и минусы конструктива, который я воплотил в пластмассе. 😉 Итак:
Плюсы:
- DIY проект использующий аддитивные технологии, вы займетесь сборкой и конструированием уникального аппарата на основе промышленного образца
- Внешний вид. Ваш дрон, скорее всего, будет такой единственный в вашем круге знакомых пилотов квадрокоптеров.
- Ремонтопригодность. Просто шикарна, если после аварии вы не повредили электронику, то просто печатаете нужные детали и приклеиваете/прикручиваете их, ждать пока производитель вышлет вам нужную запчасть не надо
- Защита камеры и подвеса. В предлагаемом проекте камера защищена от ударов лучше чем у оригинала
- Использование батарей нестандартного размера. Поскольку батарея подвешивается снизу, то размер батареи можно выбирать в широких пределах
- Использование антенн практически любых конфигураций. На раме и лучах полно места для крепления любых мыслимых антенн.
- Кастомизация. В пределах существующих моделей можно выбирать материал и цвет, а если есть навыки моделирования можно играться с формой лучей, ножек, даже рамы - можно создать очень интересные варианты, ограниченные только фантазией и размерами вашего 3д-принтера
- Подходит для печати на 3д-принтерах с небольшой областью печати. Специально разбивал громоздкие детали на составные части, чтобы уложиться в поле 200х200 мм.
Теперь о минусах, куда же без них:
- DIY проект использующий аддитивные технологии. Вам придётся заняться сборкой (ну или заказывать сборку), при этом нужен 3д-принтер, паяльник, навыки пайки, инструмент и химикаты для обработки пластика, электрический тестер, довольно много времени и терпения. Кому-то всё это не нужно.
- Внешний вид. Не всем вашим знакомым может понравится как выглядит Fimi A3 в таком корпусе.
- Новая платформа получилась тяжелее оригинального корпуса (фото ниже). При попытке кардинально уменьшить вес, несущая конструкция начинает сильно проигрывать в жесткости, что уже недопустимо для полетов. Карбоновые рамы в размерах 7-8 дюймов намного практичнее с точки зрения эксплуатации и легче по весу.
- Необходимость переделки питающего входа. Либо нужно подпаивать питающие провода к существующим контактам на плате или разъёме, либо переделывать разъём чтобы удлинить провода, батарея теперь находится дальше от разъёма.
- Неудобство доступа к кнопке включения дрона. Я не занимался этим вопросом, возможно можно отпечатать на раме что-то наподобие стандартной кнопки, но на текущий момент неудобно.
- Возможно появление помех в канале приемника GPS от проводки, которая проложена по другому.
На данный вот такие мысли, если вспомню что добавить/поменять - добавлю, поменяю.
И ещё одна особенность видео передатчика в Fimi A3 мощностью 25 мвт.
При прогреве на столе без обдува пропеллерами, через 10 минут мощность падает в 2 раза.😦
Если не устраивает такое состояния дела, то можно поставить другой более мощный, отключив штатный.
Тогда управлять настройками синхронно с приёмником не получится, да это и не очень надо на практике.
Всё можно настроить перед полётом.
Я заказал вот этот:
Power:25Mw/200mW/400mW/600mw (Adjustable)
Size:24.5*15.5mm
Weight:1.2g
banggood.com/DIY-5_8G-40CH-Raceband-25200400600mw-…
Узкий и тонкий можно в луч вставить и сделать охлаждение в виде ушей наружу как делали на регуляторах моторов в Хабсанах 501.
Есть внешнее управление, подключить к DIY connector или просто кнопку вывести.
На плате 2 светодиода для идикации состояния. их можно и в другом месте продублировать.
Ну в общем как вариант чтобы внешний вид не портить.
ru.aliexpress.com/item/4000169692791.html
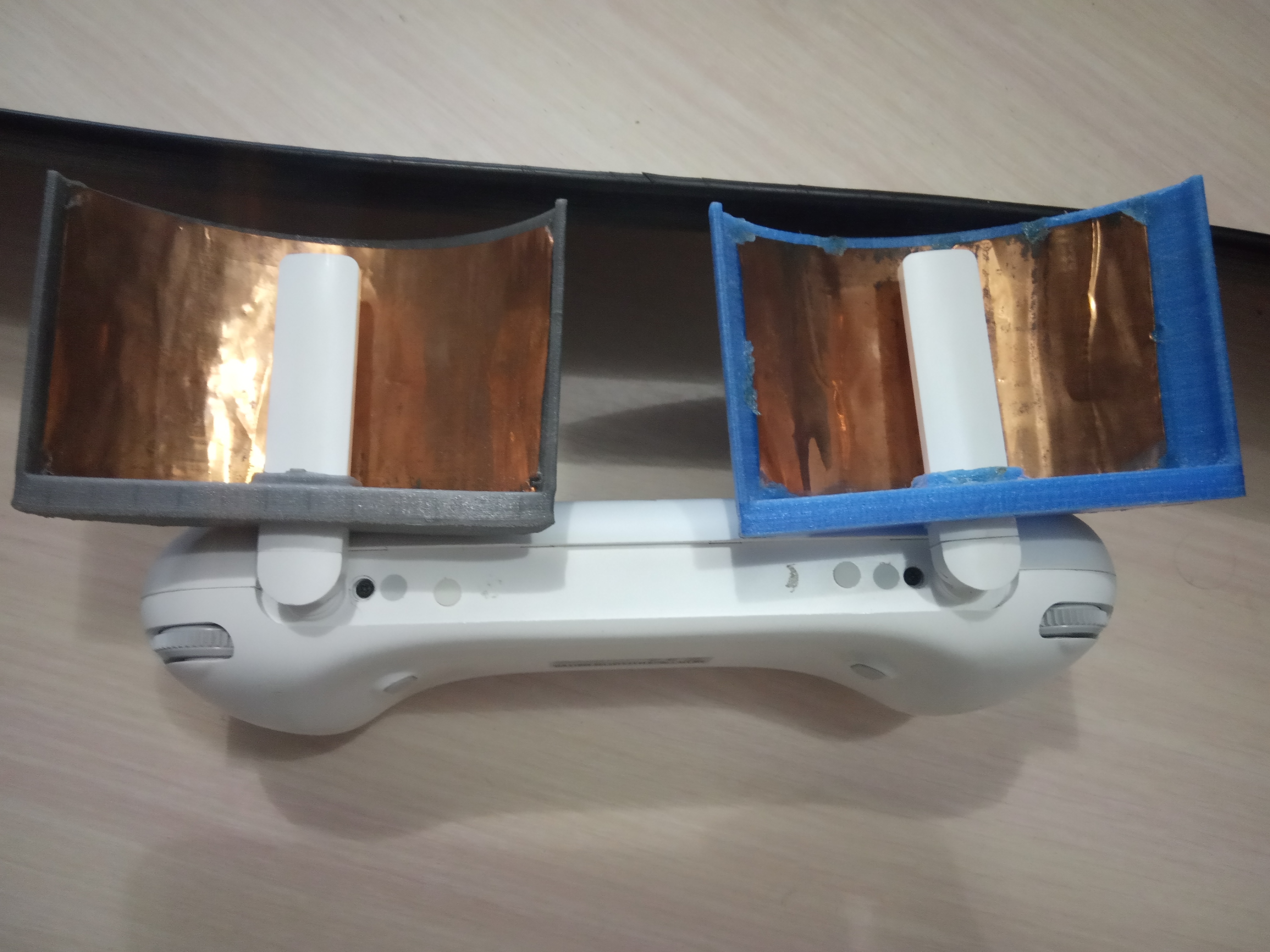
Сегодня привезли. Попробовал с монитором LITTLE PILOT 5" 600 кандел яркость - полный АТАС!
ru.aliexpress.com/item/33026500511.html
Закрытый шлем мне теперь не нужен.
3D очки тоже на … не нужны.
Монитор 5" по толщине чуть великоват и не встаёт в зажим снизу на 1 см, но нам нет преград ни в море не на суше.
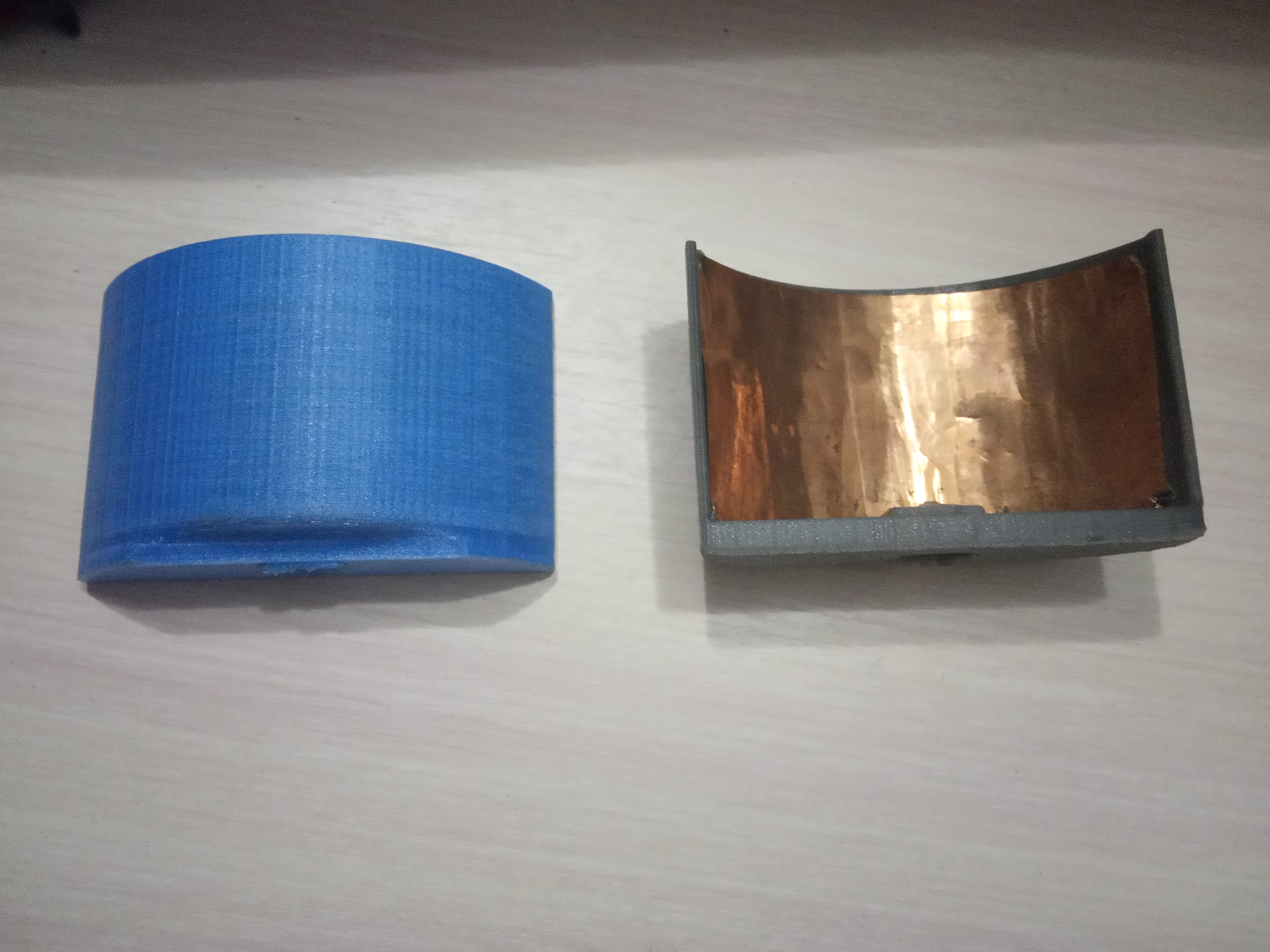
Зажим подпилим, подгоним, улучшим. Зеркала настраиваются оба так как тебе надо.
Вписывается в размер окна отлично. Картинка больше оригинального экрана монитора и как будто слегка вогнутая как в широкоформатном кинотеатре когда сидишь в центре зала.
Геометрических искажений нет и пикселей не видно, т.е. увеличение оптимальное.
Яркость и контрастность даже сделал меньше половины. Цвета - ОК.
Запросто помещаются очки.
На голове сидит удобно, лёгкий и спереди упирается только в надбровные дуги даже не надо быть питекантропом 😁
Крепление трёх точечное, очень удобное и мягкое. Через 5 минут уже не чувствуешь.
Засветка по бокам возможна когда сильный источник типа солнца в заднем секторе головы. Под зеркалом всё что происходит прекрасно видно и в дерьмо не попадёшь 😃
Надо подобрать размеры и форму шторок с обеих боков из мягкого чёрного вроде бархата материала и приклеить так чтобы не мешал складывать гарнитуру и не болтался.
Цена просто смешная, но сам такое хрен сделаешь.
Я думаю что нормальный мобильник тоже будет видно отлично.
Если это так, то возьму Eachine EX4 чтобы смотреть в HD и 600 кандел смартфон весной, когда дрон уже приведут в порядок.
При таком раскладе если летать на Eachine EX4 с такой гарнитурой постоянно, то внешний монитор без надобности.
Побил собственный рекорд дальности, 2534 метра, можно было лететь дальше, до потери изображения, (оставалось 1 деление сигнала) но тогда, акб не хватило бы на возврат.

Антенны пульта стоковые, с самодельными отражателями, на дроне только антенна по управлению выведена на пузо из за того, что развернут на 180 градусов “колкол” и провод стал как-бы короче.
Не знаю как другие, но я никогда не возвращаю дрон в спорт режиме, если он далеко, а заряда мало и есть вероятность не долететь. Я считаю, самый верный способ, лететь примерно в половину возможной скорости возврата, при этом постепенно снижаясь по мере приближения к месту посадки. Так заряд АКБ расходуется максимально экономично.
Здравствуйте. Подскажите пожалуйста как правильно подключить сервопривод к нашему квадрику? Никак не могу с DIY портом разобраться какой контакт там за что отвечает.
Никак не могу с DIY портом разобраться какой контакт там за что отвечает.
Вот здесь внизу есть распиновка. Нужен понижающий DC/DC с 12в / 5в
Сделал внешнюю GPS антенну как тут:
bloganten.ru/gps-antenna-svoimi-rukami/
Вроде на балконе пошустрей спутники ловит. Полетаем там видно будет.
Вот здесь внизу есть распиновка. Нужен понижающий DC/DC с 12в / 5в
Спасибо за совет! Я не могу разобраться на какой контакт нужно садить провод отвечающи за сигнал поступающий на сервопривод. Я вижу что там есть PWM (широтно импульсный модулятор) контакт, но в интернете я вычитал что серво-приводом нужно управлять с помощью PDM (длинно импульсный подулятор). Вот я и запутался как куда и что подключить) Если знаеш как это сделать подскажи подскажуйста.
…Вот я и запутался как куда и что подключить…
Вот здесь толково всё разжёвано:
blog.rcdetails.info/protokoly-v-priemnikah-i-pered…
На сервоприводе:
Тёмный провод - земля ( минус питания )
Красный питание +5вольт
Оранжевый или светлый PWM