FPV миникоптеры на 250х рамах (ZMR, Blackout, QAV250 и т.п.)

народ подскажите один движок туго крутится что нужно делать и куда смотреть
Подключенный к регулятору? Тогда режим тормоза может быть включен. Даже в течении некоторого времени (до 1 часа) после отключения питания. Если без регулятора, то проверить вертикальный люфт. Должен присутствовать, но не большой, в районе 0,5 мм.
Зашибись, только когда можно будет обновляться на новую версию!?
Не знаю, но скорее всего, в течение 1-2 месяцев. Если не терпится, исходники все есть, можно собрать самому, либо поискать в сети, вдруг кто уже собрал и выложил бинарную версию.
Подскажите, реально ли поставить DJI Lightbridge на QAV250, очки использовать конечно же Zeiss Cinemizer
Собственно прошил E-OSD, все получилось все работает.
Как сделать чтоб фон прозрачный был, шью прошивкой по инструкции а фон такой

Ого! У вас есть Lightbridge? Передатчик тяжеловат. Но с 6-ми пропами не вопрос, полетит!
Зашибись, только когда можно будет обновляться на новую версию!?
Делать мне было нечего, собрал из сорцов OpenPilot 14.10 RC4 с новым режимом Acro+.
Сам еще не ставил, использовать на свой страх и риск. Кто отважится прошить и полетать в этом режиме, отпишитесь об ощущениях.
Как сделать чтоб фон прозрачный был, шью прошивкой по инструкции а фон такой
Как прошивали, по какой инструкции, а то я один уже спалил, другой страшно опять пробовать.
Как прошивали, по какой инструкции, а то я один уже спалил, другой страшно опять пробовать.
тут пост или тут ПРОШИВКА HOBBYKING E-OSD ДЛЯ ОТОБРАЖЕНИЯ RSSI
Делать мне было нечего, собрал из сорцов OpenPilot 14.10 RC4 с новым режимом Acro+.
Сам еще не ставил, использовать на свой страх и риск. Кто отважится прошить и полетать в этом режиме, отпишитесь об ощущениях.
😃 не рискну пожалуй, но спасибо!
Похоже, в первый раз могло не все собраться, были ошибки в логе. Сейчас пересобрал еще раз, вроде бы ошибок нет. Перезалил файл. Если кто уже скачал, скачайте еще раз.
OpenPilot-RELEASE-14.10-RC4-win32.exe
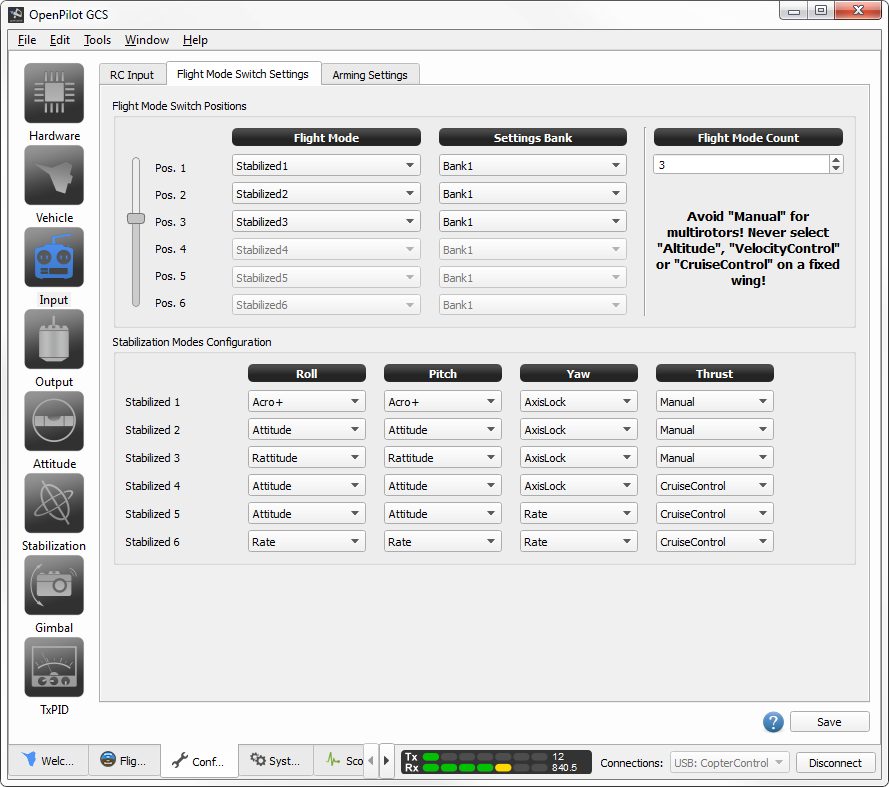
Прошил CC3D для проверки:

Дофига нового добавилось! Теперь есть фича TPS (Thrust PID Scaling) (как TPA в Naze32/MultiWii, PIDы уменьшаются при увеличении газа, чтобы не колбасило):

И режим Acro+:
Погоняй завтра, как оно будет?? Очень интересно!
Погоняй завтра, как оно будет?? Очень интересно!
Без вариантов, дубак и ветер, да и работать надо, некогда. В ближайшее время точно не смогу проверить сам.
Раз я начал, продолжу новости с НК.
Они сделали это!!!111
Рама в виде табуретки!

Помоему там слойка… карбон+тексолит, или только текстолит…
172г, а не ну ли его наухо? слон у меня лично уже есть… 😦
Сейчас пересобрал еще раз, вроде бы ошибок нет.
Установил, прошил. Все отлично!
Проверил дома, только есть небольшая тряска в режиме Attitude, видимо нужно пиды крутить. Акро плюс и Ратитьюд выравниваются в итоге сами, то что нужно, а то в рейт режиме довольно тяжело было летать.
Еще при настройке регулей пришлось выбрать 50гц, а не турбо 500, при последнем они почему то пищали через одного… В принципе на работе это не сказалось сильно.
Рама в виде табуретки!
Убого, выглядит 😆. Да и тяжеловес еще.
То есть как приедет есть смысл ставить эту прошивку? Я еще ниразу не летал) или пока на станартной попробовать, и потом уже как освоюсь дальше идти?
Убого, выглядит 😆. Да и тяжеловес еще.
Это еще пол-беды.
Судя по компоновке они хотели сделать максимально компактную и жесткую (нескладывающуюся) раму.
Это значит, что все оборудование надо впихнуь в нижнюю площадку, включая батарею.
Места для мобиуса нет в принципе.
Акро плюс и Ратитьюд выравниваются в итоге сами, то что нужно, а то в рейт режиме довольно тяжело было летать.
Rattitude будет выравниваться как и Attitude, а вот Acro+, по идее, выравниваться как раз не должен, а должен долгое время держать установленный угол, как и Rate режим. Разница между Acro+ и Rate в том что первый подстраивает значения PID в зависимости от угла наклона стиков (так умные люди пишут на форуме). Т.е. при резких отклонениях PID будут уменьшаться для плавности маневров (если я все правильно понял), но угол при этом должен фиксироваться и удерживаться продолжительное время. Если у вас он сам восстанавливается, крутите PIDы.
При сильных отклонениях стика в Acro+ коптер переходит в полностью ручной режим, что позволяет на полную мощность и без ограничений софта делать разные акро штуки (флипы, роллы). Мощность будет ограничена только движками и некоторые рамы может просто порвать в воздухе.
Еще интересно попробовать Acro+ в режиме газа CruiseControl (он может сбрасывать газ до минимального когда коптер в перевернутом состоянии во время флипа, что уменьшит просадку по высоте и позволит делать флипы/роллы на месте). Но сейчас есть открытый баг с зависанием/крэшем мозга при сочетании режимов Acro+ и CruiseControl, так что я бы пока не стал с этим экспериментировать).
Ого! У вас есть Lightbridge? Передатчик тяжеловат. Но с 6-ми пропами не вопрос, полетит!
Еще нет, но планирую купить, хочу HD качество, но как я понял будут задержки и летать быстро не получится?
Еще нет, но планирую купить, хочу HD качество, но как я понял будут задержки и летать быстро не получится?
да вроде как лайтбридж и стоит 1300$ тк там hd без задержки (по крайне мере что видел в обзорах так там задержок я не увидел)