FPV миникоптеры на 250х рамах (ZMR, Blackout, QAV250 и т.п.)
Я думал нужны именно прозрачные, они помягче вроде как. Красные тогда вот тут, совсем недорого.
это клон зажима от fpvmodel, но не важно. Они дешевле намного оригинала. Покупал месяц назад за 430 с поинтами
А почему не этот зажим брали? Этот как мне кажется удобнее и дешевле.
И как вы им будете пользоваться, если защита установлена?
А тут уже обсуждали soft motors mounting, вместо колечек, или вместе с ними? Можно погуглить, но простейший смысл - под моторы прокладываем что-то, что смягчит вибрации. источник
А тут уже обсуждали soft motors mounting, вместо колечек, или вместе с ними?
А почему не этот зажим брали? Этот как мне кажется удобнее и дешевле.
потому что было подозрение, что не подойдет с установленной защитой…
уменьшил ПИДы (>С ТАКИХ<
Да, перебор конечно.
>ДО ТАКИХ<)
Еще deviative можно раза в 2 уменьшить. И если ты летал в стабе Angle Strenght до 4 или 3 уменьшить.
вот что вышло:
А ты специально по питчу в два раза больше чем по роллу рейты сделал?
А тут уже обсуждали soft motors mounting, вместо колечек, или вместе с ними?
что то какой то тренд - крепить моторы на скотч. На рцгрупсах тишина. А на ютубе уже 5 или 6 видео про это )
немного похвастаюсь: наконец пришли отличные зажимы с бэнга! теперь хоть с защитой моторов или без - больше не нужно мучаться с откручиваниями 😍
А как считаешь сожет он с вот такой защитой рабоать?
Уау! Уже 1 кило страниц 😃 1К = 1024
Очень популярная тема!
Уау! Уже 1 кило страниц 😃 1К = 1024
Очень популярная тема!
Как бы не так =D
что то какой то тренд - крепить моторы на скотч.
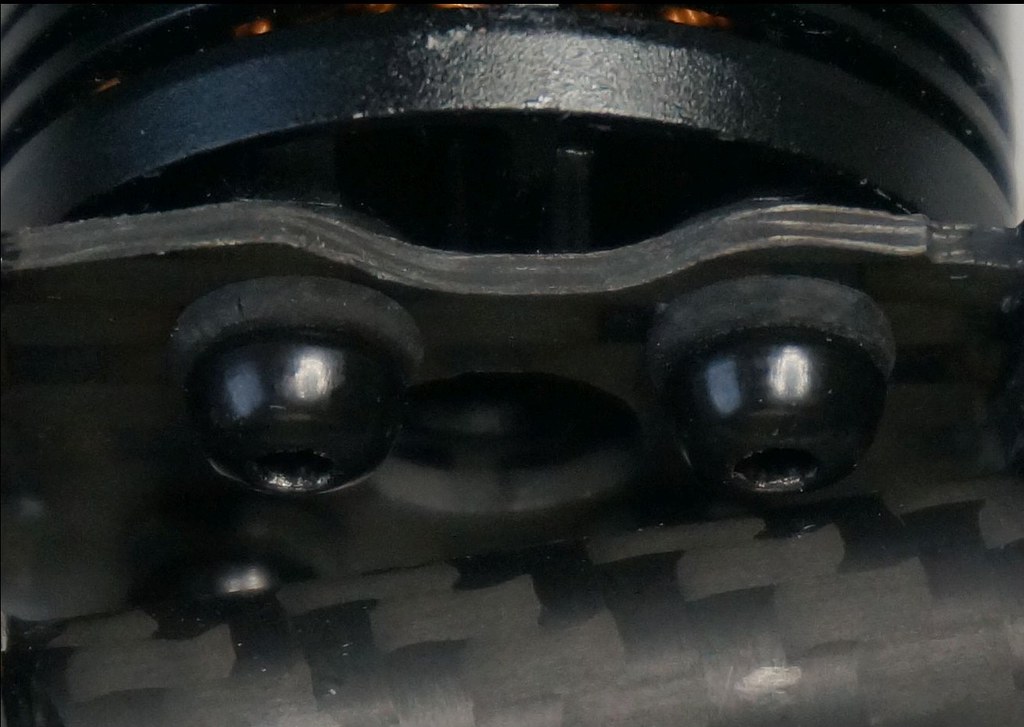
Я моторы креплю вообще на резинки от серво:
Заметно уходит звон рамы в сборе, меньше резонансов. Думаю гонщикам тоже очень полезно было бы. Резинки расчитаны под 1,5-2мм пластину, на гоночной раме нужно будет рассверлить под них отверстия.
Это на чём у вас мотор прикручен!? Тоненькое что-то уж очень. Звона в раме будет меньше, если это пластина 5мм.
Господа, помогите решить проблему переворота при подъёме. Уже чего только не пробовал, - аксель калибровал на разных поверхностях, режимы полёта менял, бетафлайт заново перепрошивал с полной очисткой, регули перенастраивал. Всё-равно упорно летит вправо при взлёте, пробовал рукой его держать, даёшь газ, и явно видно что левые два мотора крутятся сильнее чем правые.
Конфиг:
Eachine Racer 250 с SPRacing F3 клоном и перепаяными пчёлами 20А
Betaflight 3.0.1, приёмник devo rx701 подключен по PWM, в регулях стоит oneshot125 (с таким сочетанием pwm+oneshot не заводится betaflight 3.1)
отключены все датчики кроме акселерометра и гироскопа, сделан ммикс под конфиг коптера, лупы 4/2
А на аппе случайно каналы газа и ролла не замиксованы?
А на аппе случайно каналы газа и ролла не замиксованы?
Неа, только что проверил.
Плюс решил проверить ммикс. На вкладке моторы правильно реагируют на индивидуальные ползунки. 1 - правый нижний, 2 - правый верхний, 3 - левый нижний.
На вкладке setup кирпич корректно реагирует на наклоны и повороты, плату стрелкой вперёд поставил.
А если заармить моторы в angle mode и наклонить квадрик вправо, то моторы 2 и 3 ускоряются, если влево наклонить, то 1 и 4. Не пойму что происходит.
Сдался тебе это angle mode))) а в арко все норм?
Сдался тебе это angle mode))) а в арко все норм?
Неа, теми же моторами реагирует на наклоны вправо и влево, как и в angle. Только газ быстро скидывает до минимума.
В стабе только взлет и посадка, остальное в Акро (галочка Airmode включена)
Уменьшил Д до 36, стало лучше, но немного тангажа и правого крена осталось
{"assets_hash":"a8b26fa7f6e768b07a72c8c9aadb9422","page_data":{"users":{"45d22e7e3df9550077786353":{"_id":"45d22e7e3df9550077786353","hid":20585,"name":"gena_g","nick":"gena_g","avatar_id":null,"css":""},"4f81bb193df9550077745b07":{"_id":"4f81bb193df9550077745b07","hid":117507,"name":"Кариёзный_монстр","nick":"Кариёзный_монстр","avatar_id":null,"css":""},"4fb8f9fb3df95500777442c2":{"_id":"4fb8f9fb3df95500777442c2","hid":119663,"name":"Skolzyashiy","nick":"Skolzyashiy","avatar_id":null,"css":""},"501658743df955007774194e":{"_id":"501658743df955007774194e","hid":123083,"name":"lokanaft","nick":"lokanaft","avatar_id":null,"css":""},"51b6f0353df9550077735b29":{"_id":"51b6f0353df9550077735b29","hid":157969,"name":"barisol","nick":"barisol","avatar_id":null,"css":""},"526276cf3df9550077730fc0":{"_id":"526276cf3df9550077730fc0","hid":179522,"name":"Hyperion","nick":"Hyperion","avatar_id":null,"css":""},"54ec267b3df95500777202c1":{"_id":"54ec267b3df95500777202c1","hid":219107,"name":"SergejK","nick":"SergejK","avatar_id":null,"css":""},"551eccb13df955007771ecfb":{"_id":"551eccb13df955007771ecfb","hid":221367,"name":"wanted212","nick":"wanted212","avatar_id":null,"css":""},"5533b71d3df955007771e3bf":{"_id":"5533b71d3df955007771e3bf","hid":222295,"name":"tbsk0x","nick":"tbsk0x","avatar_id":null,"css":""},"56ece9cc3df9550077712f96":{"_id":"56ece9cc3df9550077712f96","hid":247872,"name":"mil-lion","nick":"mil-lion","avatar_id":null,"css":""},"57b077013df955007770e6e7":{"_id":"57b077013df955007770e6e7","hid":255156,"name":"gusnkt","nick":"gusnkt","avatar_id":null,"css":""},"57b8ae503df955007770e3a7":{"_id":"57b8ae503df955007770e3a7","hid":255554,"name":"Дмитрий_Raccoon","nick":"Дмитрий_Raccoon","avatar_id":null,"css":""},"587f8e003df955007770a3e1":{"_id":"587f8e003df955007770a3e1","hid":267734,"name":"Sinful","nick":"Sinful","avatar_id":null,"css":""},"5880ecab3df955007770a336":{"_id":"5880ecab3df955007770a336","hid":267893,"name":"AiRplane=","nick":"AiRplane=","avatar_id":null,"css":""}},"settings":{"can_see_ip":false,"can_report_abuse":false,"can_see_hellbanned":false,"forum_can_view":true,"forum_can_reply":false,"forum_edit_max_time":30,"forum_can_close_topic":false,"forum_show_ignored":false,"forum_mod_can_delete_topics":false,"forum_mod_can_hard_delete_topics":false,"forum_mod_can_see_hard_deleted_topics":false,"forum_mod_can_edit_posts":false,"forum_mod_can_pin_topic":false,"forum_mod_can_edit_titles":false,"forum_mod_can_close_topic":false,"can_vote":false,"forum_mod_can_add_infractions":false,"forum_topic_title_min_length":10,"forum_reply_old_post_threshold":30,"votes_add_max_time":168,"forum_show_post_interval":7,"can_see_deleted_users":false},"section":{"_id":"61c9a54c3df9550077bb5207","hid":136,"title":"Мини и гоночные коптеры до 300мм","parent":"61c9a54c3df9550077bb51fe","description":"","is_category":false,"is_votable":true,"is_writable":true,"cache":{"topic_count":265,"post_count":107629,"last_post":"66d6a0aa3627b35af438344c","last_topic":"66cc53c4563b07d603eeab5d","last_topic_hid":572531,"last_topic_title":"Квадрокоптер Walkera Rodeo 150 биндинг приемника","last_ts":"2024-09-03T05:37:46.223Z","last_user":"491ea1623df95500777757b6"}},"topic":{"_id":"535b5ad13df95500770755c9","hid":362347,"title":"FPV миникоптеры на 250х рамах (ZMR, Blackout, QAV250 и т.п.)","views_count":3931597,"last_post_counter":51223,"cache":{"post_count":50000,"first_post":"535b5ad13df95500770759e3","first_ts":"2014-04-26T07:05:53.000Z","first_user":"4ad8f0863df9550077768ed1","last_post":"6405b40dc68e4ffcbc183a99","last_post_hid":51223,"last_ts":"2023-03-06T09:36:13.605Z","last_user":"41dd37293df95500777929a4"},"st":1,"section":"61c9a54c3df9550077bb5207"},"subscription":null,"pagination":{"total":50000,"per_page":25,"chunk_offset":40894},"posts_list_before_post":["paginator","datediff"]},"locale":"en-US","user_id":"000000000000000000000000","user_hid":0,"user_name":"","user_nick":"","user_avatar":null,"is_member":false,"settings":{"can_access_acp":false,"can_use_dialogs":false,"hide_heavy_content":false},"unread_dialogs":false,"footer":{"rules":{"to":"common.rules"},"contacts":{"to":"rco-nodeca.contacts"}},"navbar":{"tracker":{"to":"users.tracker","autoselect":false,"priority":10},"forum":{"to":"forum.index"},"blogs":{"to":"blogs.index"},"clubs":{"to":"clubs.index"},"market":{"to":"market.index.buy"}},"recaptcha":{"public_key":"6LcyTs0dAAAAADW_1wxPfl0IHuXxBG7vMSSX26Z4"},"layout":"common.layout"}