FPV миникоптеры на 250х рамах (ZMR, Blackout, QAV250 и т.п.)

А почему на этом стенде все используют пластину с боковым креплением, а не с центральным, которая на станине закреплена? Точнее были бы данные по тяге.
оффтоп мысли в слух - самолеты сделаны быстро летать носом вперед, квадрики висеть и плавно двигаться в любом направлении. Зачем делать из квадрика самолет. Может проще пойти в самолетчики? )
Понятно что мне и самому нравятся эти быстрые квадрики, но есть ощущение неправильности происходящего)
плавно двигаться в любом направлении
60-100 км в час уже не плавно)))
висеть и плавно двигаться
Висеть и плавно двигаться господь создал планера.
Но там моторок нет, батарейки не те, да и в чемодан не лезут…
Поэтому особо е**нутые моделисты строят 250 коптеры.
Висеть и плавно двигаться господь создал планера.
Но там моторок нет, батарейки не те, да и в чемодан не лезут…
Поэтому особо е**нутые моделисты строят 250 коптеры.
Про коптеры в точку. Но не про планера. Соревнования по f3f посмотрите. Скорость под 300км/ч (больше не оффтоплю)
Полетал немного на винтах 5*4 и прозрел. Быстрые, прочные. Выдерживают нехилые кувырки и перекаты по земле. А кто-то пробовал карбон-нейлоновые? На сколько они тяжелее и на сколько лучше они выдерживают краши?
Немного погонялись на выходных.
Народ! Ну неужели никто не пробовал вешать GPS к CC3D?? У меня лажа какая-то, ничего не понимаю. Физически всё подлючил верно. Проверил так - выставил порт куда подключен GPS на CC3D в режим ComBrige. Подрубился через софтину для настройки GPS u-center. Всё прекрасно сконектилось! Значит физически я подключаю GPSмодуль к cc3d правильно. Проблема возникает в момент когда я на вкладке System -> Settings -> HwSettings -> OptionalModues перевожу “GPS” в “enable”. После перезагрузки cc3d долго грузится, вываливается куча красных статусов:
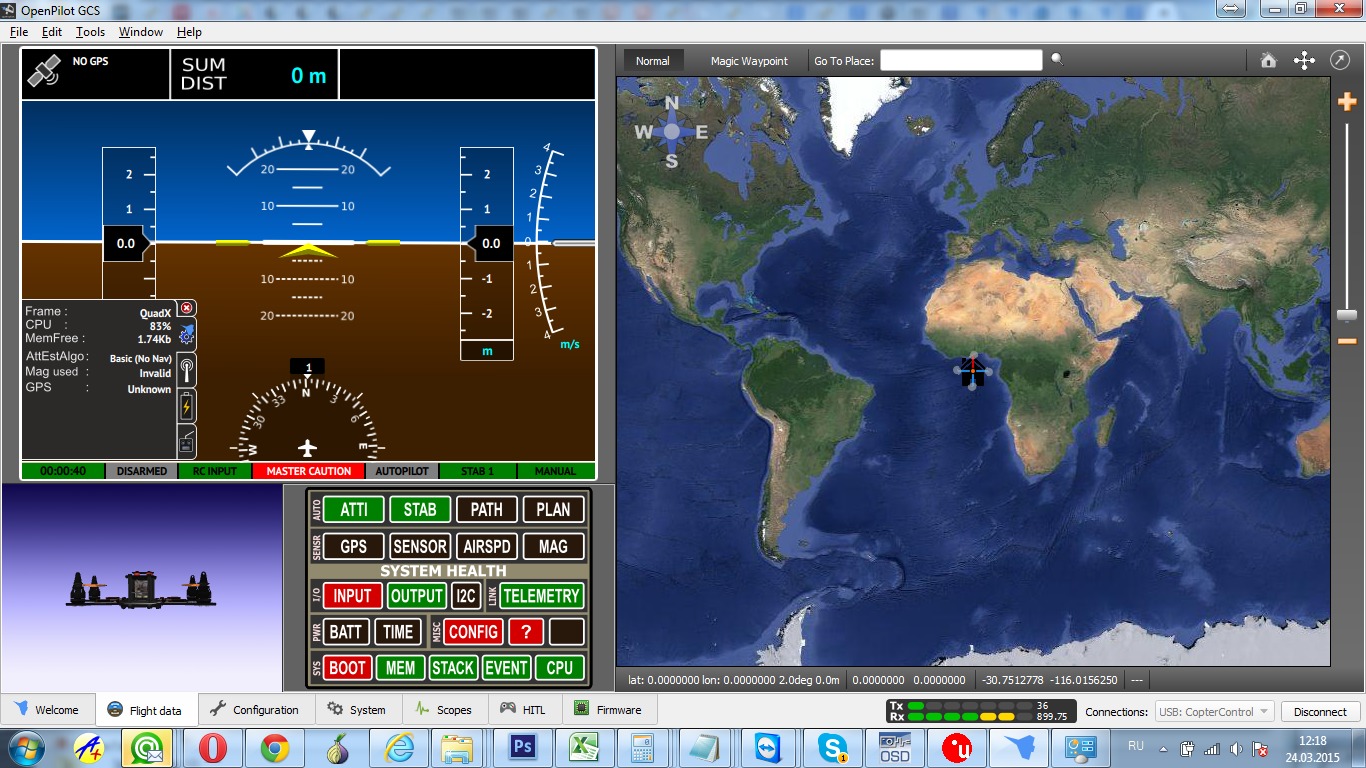
вот что в этих статусах написано:
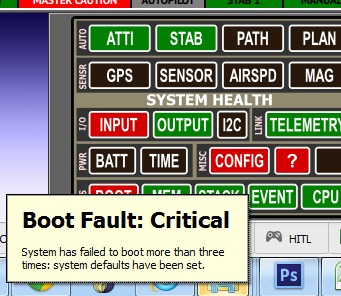
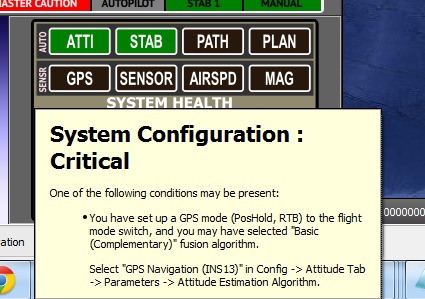
Возникает какая-то проблема с загрузкой как я понимаю, и сс3д сбрасывает настройки. Что написано про GPS вообще не пойму… Не могу найти этот раздел с настройками: Select “GPS Navigation (INS13)” in Config -> Attitude Tab -> Parameters -> Attitude Estimation Algorithm.
Никак не пойму что за проблема… Причем такое происходит именно когда активирую System -> Settings -> HwSettings -> OptionalModues -> “GPS”. Другие настройки меняются без проблем…
Не подключал, но вроде ж пишет: “вы назначили на один из переключателей полетный GPS режим (удержание позиции, возврат на базу)”, а алгоритм Basic. Смените алгоритм на вкладке параметры Attitude…"
Нужно ли назначать полетный режим, если необходима только информация GPS для OSD? CC3D, вероятнее всего, просто не хватает ресурсов для поддержки полноценных GPS режимов. Это уже уровень Revo.
А, позвольте спросить, для чего вам на CC3D GPS? Он же протсо координаты отображает. Насколько я помню ни возврат к месту взлета, ни полета по точкам не умеет.
Насколько я помню ни возврат к месту взлета, ни полета по точкам не умеет.
Кстати, на клинфлайте допилили RTH? Кто нить пробовал?
доделал наконец вчера свой приемник для шлема…
Молоток, теперь это всё в дневничок пожалуйста! Даже спектр анализирует…
скоро наконец буду летать)))
Сдается мне, при полетах на минике вам будет не до этих наворотов ))))
Ну неужели никто не пробовал вешать GPS к CC3D??
Может для обсуждения этого изв…, этой задачи отдельную тему создать?
Эти вопросы про GPS на 250-х навязли в зубах, через страницу.
Молоток, теперь это всё в дневничок пожалуйста!
на самом деле сюда просто добавил параллельно основной теме, там все по нему и будет.
хотя в дневник действительно правильней добавить, чтобы и искать легко, и в теме не флудить
оффтоп мысли в слух - самолеты сделаны быстро летать носом вперед, квадрики висеть и плавно двигаться в любом направлении. Зачем делать из квадрика самолет. Может проще пойти в самолетчики? )
Понятно что мне и самому нравятся эти быстрые квадрики, но есть ощущение неправильности происходящего)
Попробуйте на самолете по парковке полетать!
Подскажу даже на каком - фанджет. Все сразу станет на свои места! 😃
Может для обсуждения этого изв…, этой задачи отдельную тему создать?
Эти вопросы про GPS на 250-х навязли в зубах, через страницу.
Мы же вроде тут договорились не раздавать советы на право и налево что здесь можно обсуждать, а что нет.
Тут и так куча мусора, уже и планеры каким то боком вклинились - но не нравится - пролистайте и все.
Просто флуда будет больше если еще обсуждать - что в этой теме можно обсуждать, а что нет. Проще ответить человеку и вернуться к наболевшему - к моторам и пропам оранжевым 😃
Вроде правила форума никто не отменял. По всем контроллерам есть свои темы, и зачем поддерживать тут оффтоп совсем непонятно.
Учитывая, что для гонок жпс вообще не нужен.
Учитывая, что для гонок жпс вообще не нужен.
Вам нет, а кому то нуже. Напрмиер мне. Сделаю из него черный ящик, благо мозг naze32 это легко позволяет без гемора.
В лесу буду гонять - потерять легко. А маяки и пеленгаторы хорошо, но тоже не панацея.
Вопросы по CC3D/GPS лучше сюда писать, наверное: rcopen.com/forum/f123/topic238442
А маяки и пеленгаторы хорошо, но тоже не панацея.
Панацея - пищалка. А не жпс.