FPV миникоптеры на 250х рамах (ZMR, Blackout, QAV250 и т.п.)

Панацея - пищалка. А не жпс.
Что будете делать если аккум отлетить? У меня на пульте будут последние координаты.
А что будет с вашей пищалкой.
Вы можете делать что хотите, до первого потерянного коптера.
Ну я как-то за три года ни одного не потерял. Но идея с координатами на пульте хорошая. Жаль только, что это подходит только тем у кого таранис.
У меня обычная турнига (не хило прокачанная) показывает координаты.
В лесу буду гонять - потерять легко. А маяки и пеленгаторы хорошо, но тоже не панацея.
В лесу за 150 метров 5.8 сигнал всё равно пропадёт. Пошли и нашли.
А если летать на 1.3Ггц, далеко и с GPS - то это не 250ка, и подход совсем другой.
Что будете делать если аккум отлетит?
качественная липучка и 2 хорошие стяжки обеспечивают единство аккума с остатками верхней платы даже в случае татального краша.
Правда там уже не мозгов, ни пищалки…
,Ну я как-то за три года ни одного не потерял. Но идея с координатами на пульте хорошая. Жаль только, что это подходит только тем у кого таранис.
Тут как повезет, можно не потерять, а можно и несколько за сезон. Я хочу просто летать не оглядываясь на то, что в случае падения могу просто не найти мелкого, в том же лесу. Денег и времени в мелкого было вложено не мало.
На сколько знаю, Turnigy тоже можно. Тоже народная аппа.
А если летать на 1.3Ггц, далеко и с GPS - то это не 250ка, и подход совсем другой.
Да нее… 1,3 обеспечит просто приличное принятие сигнала, можно не бояться залететть за куст. Ну ничего в этом супердолголетного нет.
Просто кому что нравится. О вкусах не спорят.
Записал видосик, может кому то поможет, сам долго мучался)
На сколько знаю, Turnigy тоже можно. Тоже народная аппа.
У меня Graupner с телеметрией. Ublox neo-6m + arduino отлично передают координаты на аппу.
Не подключал, но вроде ж пишет: “вы назначили на один из переключателей полетный GPS режим (удержание позиции, возврат на базу)”, а алгоритм Basic. Смените алгоритм на вкладке параметры Attitude…"
Нужно ли назначать полетный режим, если необходима только информация GPS для OSD? CC3D, вероятнее всего, просто не хватает ресурсов для поддержки полноценных GPS режимов. Это уже уровень Revo.
Дык, в том то и проблема. Режимы у меня назначены не связанные с GPS! :
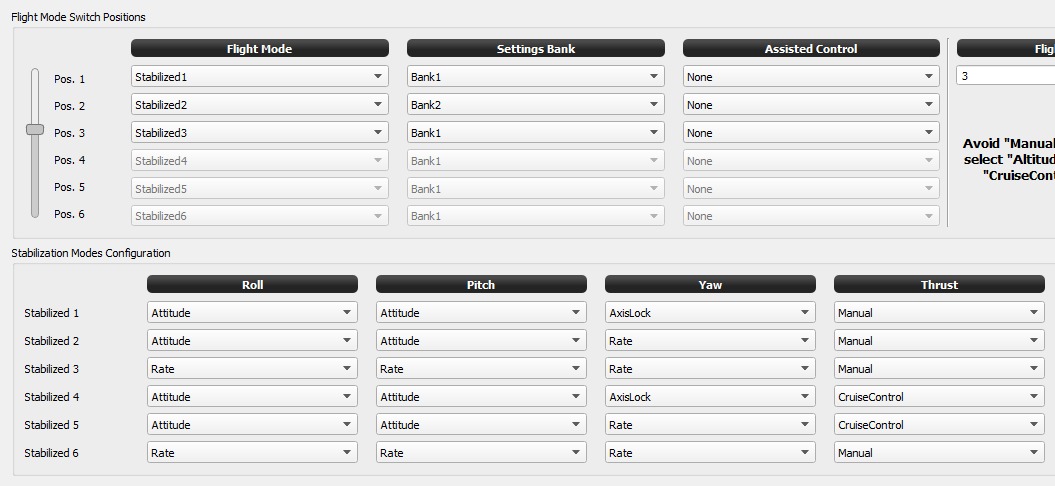
да и нету у cc3d режимов GPS никаких! Их выбрать даже нет возможности! Вот и не понятно что это за ошибки такие странные…
А, позвольте спросить, для чего вам на CC3D GPS? Он же протсо координаты отображает. Насколько я помню ни возврат к месту взлета, ни полета по точкам не умеет.
Вот именно для этого и нужно, что б координаты знать! 😃 Ну и, следить за расстоянием от базы… что б не залетать далеко…
Кстати, на клинфлайте допилили RTH? Кто нить пробовал?
Присоединяюсь к вопросу! Особо интересно, будет ли RTH работать на перепрошитом cc3d? Ведь в cc3d компаса нету… А GPS без компаса вроде как работать нормально не может…
Может для обсуждения этого изв…, этой задачи отдельную тему создать?
Эти вопросы про GPS на 250-х навязли в зубах, через страницу.
Если честно не видел на последних страницах информации о cc3d+gps. Киньтесь ссылкой пожалуйста.
Вроде правила форума никто не отменял. По всем контроллерам есть свои темы, и зачем поддерживать тут оффтоп совсем непонятно.
Учитывая, что для гонок жпс вообще не нужен.
Не нашёл если честно ветку по cc3d, так бы конечно туда написал сразу. CrazyCoder уже ткнул носом в тему, ну раз уж тут начал, дослушаю мнения 😃 Кстати, я тоже до недавнего времени думал что GPS не нужен… Нарезал вокруг себя круги потихоньку… Ну и в общем зацепился за веточку (не заметил). А летел относительно быстро и далеко, в общем хватило что бы по энерции отлететь на достаточно большое расстояние… В общем весь оставшийся день лазил в сугробах по пояс, искал квадрик! Причем прочёсывал-то пятно метров 40 радиус… Но это было ппц как сложно. Весь вымок, ужасно устал, думал уже не найду! Но повезло! Вот тогда поставил пищалку. Но её бывает не слышно из-под глубокого сугроба. А gps модуль валялся без дела… Вот и подума что будет не лишним его воткнуть… Весит он считанные граммы, а пользы может принести очень много!
Записал видосик, может кому то поможет, сам долго мучался)
Отличное видео.
Пробовали летать со стабилизацией?
У меня Graupner с телеметрией. Ublox neo-6m + arduino отлично передают координаты на аппу.
Радует, что вы в этой ветке наверное один такой.
В штатном режиме GPS работает только с Таранисом. Колхозы просьба не предлагать.
Присоединяюсь к вопросу! Особо интересно, будет ли RTH работать на перепрошитом cc3d? Ведь в cc3d компаса нету… А GPS без компаса вроде как работать нормально не может…
Нету ни компаса ни баро, никогда РТХ там не будет.
В штатном режиме GPS работает только с Таранисом. Колхозы просьба не предлагать
У граупнера есть готовый GPS-модуль, втыкается в приёмник и готово. Только он стоит 70 евро и весит 20 грамм.
Радует, что вы в этой ветке наверное один такой.
Может ещё кому-нибудь пригодится. Покупать Таранис ради одного 250-ого квадрика мне показалось слишком расточительно, взял шестиканальный Graupner mz-12 почти в два раза дешевле Тараниса.
Установил OP 15.02, заметил, что при выкл. апы моторы продолжают вращается, то есть при потери связи коптер улетает не известно куда? В ОР 14.20 моторы отключались, что логично - или я не прав?
Я писал об этой проблеме пару страниц назад rcopen.com/forum/f136/topic362347/8027.
Если верить офф. вики wiki.openpilot.org/…/How+to+Setup+Failsafe+for+Rev… то при выключении передатчика/отсоединении приемника от мозга - DataObjects->ManualControlCommand->Connected должен становиться False. На прошивке 15.02 это не работает и мозг так и не узнает что приемник потерял связь или отключился.
Перепрошился на 15.01 - все работает как нужно. Следовательно могу сделать вывод что это новый баг, появившийся в прошивке 15.02.
Почему о нем особо никто не пишет - скорее всего мало кто подключает передатчик по PWM, а я предполагаю что при этом способе подключения приемника к мозгу и появляется эта проблема.
Если кто-то знает как/может заперортить этот баг в OpenPilot - будет хорошо.
Вопросы по CC3D/GPS лучше сюда писать, наверное: rcopen.com/forum/f123/topic238442/1518
В связи с логичным предложением Сергея - предлагаю продолжать обсуждение в соответствующей теме.
Катаюсь на DEVO-10 со штатной телеметрией всё есть и гпс, вольтажи, т-ра, обороты…с альтернативной прошивкой и логи посмотреть можно. 😃
Если кто-то знает как/может заперортить этот баг в OpenPilot - будет хорошо.
Долго смотрел и мерял MC2204 с FPVModel.
Там тоже валы тройки и подшипник Ф8.
тоже смотрю на них сейчас fpvmodel.com/fpvmodel-mc2204-2300kv-brushless-moto… - на чертеже отмечен вал 2мм. Или я не туда смотрю? Просто я тоже считаю что 3мм вал это решающий аргумент для мотора.
Катаюсь на DEVO-10 со штатной телеметрией всё есть и гпс, вольтажи, т-ра, обороты…с альтернативной прошивкой и логи посмотреть можно. 😃
Если связь с приёмником пропадает, остаются ли данные у “девушки” хоть где-нибудь?
на чертеже отмечен вал 2мм. Или я не туда смотрю? Просто я тоже считаю что 3мм вал это решающий аргумент для мотора.
Вчера долго изучал вопрос.
Пришел к выводам:
- Выступающий конец вала прошлифован до 2 мм (по видимому в целях совместимости с пропами, имеющими центровое 2 мм отверстие).
- Вал 3 мм (долго мерил увеличенные фотографии).
- Подшипники наружным диаметром 8 мм (тоже пересчетом по фотографиям и чертежам).
Панацея - пищалка. А не жпс.
Упал миником на асфальт. Пищалка, которая была на аккуме сверху - вдребезги, вместе с балансирным коннектором аккума. То есть буззеры внутри термоусадки остались и даже пытались сообщить, что одна банка якобы просела до нуля, но так тихо, что найти по ним - нереально.
Вывод: средства поиска нужно прятать внутри рамы 😃
Внимание всех кто купил Atas Mini PDB Pro.
В PDB обнаружен дефект, 5V регулятор, по всей видимости, не совместим с ESCs, в которых включен damped light. Если от регуля будет обратный ток, 5V BEC сгорает и все 5V выводы на плате начинают выдавать напряжение аккума, что обычно приводит к сгоранию приемника, OSD и некоторых мозгов, 5V камер/передатчиков.
В теме по PDB о проблеме отписалось уже около десятка человек. Причем, по словам некоторых, у них обычные регули без damped light.
Производитель обещал испарвить проблему в следующей партии и предоставить специальную скидку для всех кто уже купил дефетную версию.
Я сам купил несколько таких PDB и уже начал собирать на одной коптер, теперь придется взять другую PDB или использовать отдельный BEC на 5V.
средства поиска нужно прятать внутри рамы
В идеале - внутри рамы и с автономным питанием. Писк по пропаже сигнала и/или по запросу с пульта.
И, вы будете смеяться, такой прибор есть на бангуде.
Меньше 6 баксов.
Мне уже помог раз…
Отличное видео.
Пробовали летать со стабилизацией?
Пока нет, вчера ночью дособирал, сегодня может взлечу, для пробы.
Если связь с приёмником пропадает, остаются ли данные у “девушки” хоть где-нибудь?
Только в альтернативной прошивке.