FPV микрокоптеры на рамах от 100 до 200мм

А видео хотя бы с курсовой? Было бы интересно.
А видео хотя бы с курсовой? Было бы интересно.
Как все настрою, так и запишу. Пока всего два акка успел отлетать, дожди у нас(
Подсобрал kPix-140, младшего брата колобка =)
Клёвый сырник получился 😃
H1407-3800кв
как эти моторки по качеству исполнения?
В помещении моторки горячие, на улице полностью холодные.
В помещение до скольких примерно градусов разогреваются моторки ?
Если очень интересно, могу замерить вечером.
Я тоже на это внимание обратил, что моторы греются при висении в помещении, поначалу даже испугался слегка…
При полетах на улице гонял с разными пропами, специально проверял моторы - не греются, в худшем случае, немного теплые.
А когда на улице будет +25?
Будем летать с кондиционером…
как эти моторки по качеству исполнения?
как и любые другие RCX
В помещение до скольких примерно градусов разогреваются моторки ?
градусов 50 не более.
А когда на улице будет +25?
Сейчас +10, значит будет 65 градусов. Моторкам будет пофигу на такую температуру.
При таком сетапе существенная разница между 3S и 4S?
При таком сетапе существенная разница между 3S и 4S?
я на 3s не летаю =)
Народ, подскажите плз)
Столкнулся с необходимостью уменьшить габариты приёмника Devo RX703a - нужно убрать 2.43 штырьки. Разобрал корпус и увидел, что блок 2.54 штырей сидит на отдельной текстолитовой пластине, которая держится по сути только за счёт пайки. В принципе можно её отпаять, и сэкономить кучу места.
Проблема в том, что на этой площадке находятся SMD компоненты (чёрные), которые сидят на всех сигнальных дорожках. Компоненты не “звонятся” мультимером - те это не резисторы, скорее всего кондёры.
Вопрос в том:будет ли приёмник без них работать, или же мне придётся как-то переносить их на основную плату?
При таком сетапе существенная разница между 3S и 4S?
Я могу сказать о RCX1407 3200kv - разница заметна, но я бы не сказал, что настолько уж критична - на 3S вполне себе бодро можно летать.
Калибровку делал.
Самое интересно то, что взлетает коптер нормально без наклона, а через некоторое время приходится стиком компенсировать наклон вперед.
Видимо, что то надо в контроллере крутить информации на русском мало.
Буду курить рцгрупс.
Если у вас плывет горизонт в полете, значит ваш контроллер не справляется с вибрацией. Датчики просто перегружены излишними изменениями туда-сюда-обратно и не могут оценить изменения адекватно. Решений несколько, в порядке приоритета:
- Убрать источник вибраций, например отбалансировать пропеллеры и моторы.
- Уменьшить P, чтобы вибрации не так сильно усиливались контроллером.
- Поставить больше развязки между рамой и датчиками (контроллером).
Первое не приводит к негативным последствиям, второе и третье добавит ощущения коровы на льду.
On the side note:
Я пробовал почти все сетапы на 180mm и меня устраивают 2 варианта:
- 1306 ~3100kV с 4045 пропеллерами, не BN, на 3S 1300mAh или 4S 850mAh батарейке, никакой HD камеры, легкий вариант.
- 2205 ~2600kV c 4045 тройными BN пропеллерами на 4S 1300mAh батарейке, при желании с HD камерой, очень злой и тяжелый вариант.
Все 1806 2300, и т.д. - от лукавого, нужно минимум 2600, 1806 2600+ не пробовал, может быть более заряжено, но точно менее прочно. (:
- Убрать источник вибраций, например отбалансировать пропеллеры и моторы.
- Уменьшить P, чтобы вибрации не так сильно усиливались контроллером.
- Поставить больше развязки между рамой и датчиками (контроллером).
Еще можно хардварный фильтр гиры использовать и софтварный в мк. Помогает, я так добивался более или менее адекватного полета на движках с совсем разбитыми подшами.
Простите, извращения не учитывал. (:
Кстати, у меня есть дела в Саратове 11 июня, нет желания полетать вместе 10 или 12? Есть места на примете?
Без проблем, всегда хотелось на трикоптер посмотреть. Единственно не имею понятия где я буду 10 или 12 июня ))
Сегодня приобрел 7 моторчиков 1806/2300кв для 160-й рамы. Три уже поставил и проверил, четвертый отказывается работать из-за регулятора. Как обзаведусь новым регулятором так сразу и продолжу. Пропеллеры планируются трехлопастные 4045 батарейка 4банки 850мАч Должен получиться не тяжелый, но довольно злой квадрик. В общем продолжение следует…
Коллеги, как Вы считаете, какие моторы будут предпочтительнее на раму RC180 V2?
- Cobra CM-1806/26 2800Kv (Не понимаю, что здесь означает 26?)
- DYS MR2205 2750kv
- Emax RS2205-2600KV
- 2205 ~2600kV c 4045 тройными BN пропеллерами на 4S 1300mAh батарейке, при желании с HD камерой, очень злой и тяжелый вариант.
(:
Для второго сетапа использовали ESC 20 или 30A?
Изначально сетап такий:
рама - Diatone ET 160 понравилась тем, что очень легкая и можно использовать пропы 4", 3,5", 3"
движки - RCX 1407/3800,
регули - XM20A,
РDB - Matek Micro PDB.
Пропов разных назаказывал…на попробовать, а вот эти с сюрвейла как то не заметил сразу.
В выходные планирую собрать все в кучу 😃
Буду экспериментировать с пропами разных размеров и аккумуляторами 3S/4S в поисках золотого грааля.
А набор от MyRCMart c 148 рамой я тоже заказал, просто “не смог пройти мимо”, это фактически мастхэйв.
А какой сет выбрали и почему?
Полетал сегодня на коптере
рама kermit SWH170
движки dragonfly mc1806 2300kv
регули DYS BL20A
пропы dal 4 на 4,5
мозг CC3D прошитый на BetaFlight
акки giant power 850 и turnigy nano tech 850 3 банки
такое ощущение что не хватает тяги
Советы по апгрейду?
ПС: пролетал алюминиевую гайку M5, может кто знает где есть бюджетно?
Советы по апгрейду?
4 банки превратят ваш овощ в нормальный квадр. Но кермит не самая легкая рама, мой грасхоппер 160 на 40-50 гр легче кермита с той же вмг.
Никак не могу побороть подергивания 160 коптера, пиды по моему уже ужимать некуда, может у кого какие идеи будут?

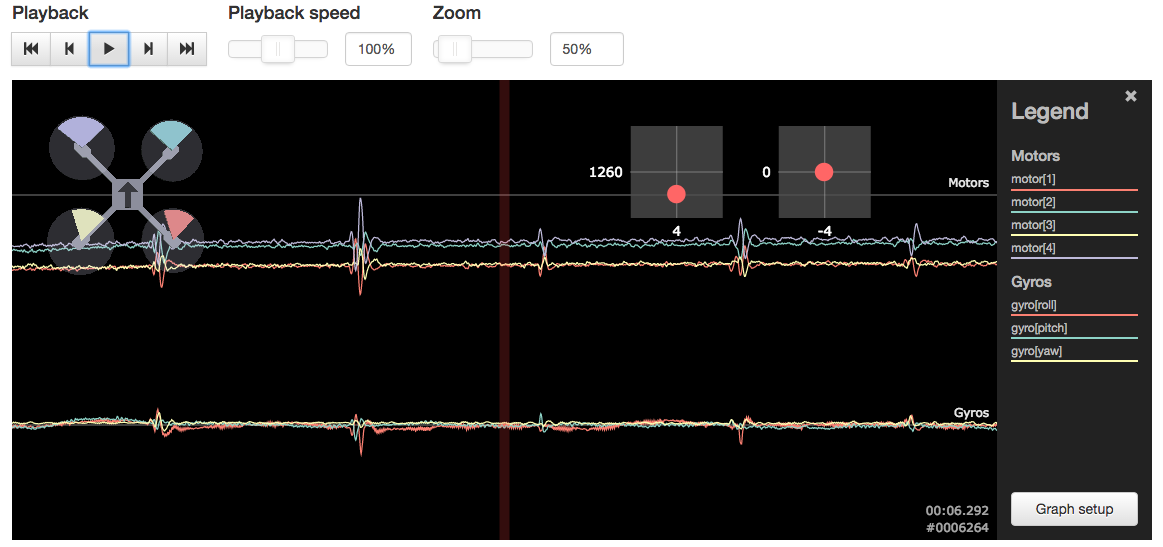
Посмотрите еще blackbox лог
Сегодня приобрел 7 моторчиков 1806/2300кв для 160-й рамы.
но довольно злой квадрик.
Не будет злого квадрика на 2300кв и 4", никаким образом.
Никак не могу побороть подергивания 160 коптера, пиды по моему уже ужимать некуда, может у кого какие идеи будут?
Не разбираюсь в блэкбокс, но мне кажется, что p по яву не должен быть в 9 раз больше, чем по питчу и в 18 раз больше, чем по роллу. Я бы снизил с 9 до 3-4 максимум.
Яв еще не настроил, осциляции по роллу в основном, и чуть меньше по питчу. В скрине с блэкбокса видно что они через определенное время “проскакивают” см. (нижний график)
Яв еще не настроил, осциляции по роллу в основном, и чуть меньше по питчу.
Что мешает яв настроить? там всё взаимосвязано и перебор по одной оси может влиять на остальные оси.