Прошивки CleanFlight/BetaFlight для полетников

Парни вопрос такой. Слышал что при установки бетафлайт на цц3д есть баг. Это при полете включается ФС. Сегодня прошил. Подлетнул и действительно он есть. Не исправили его еще? Версия 2.1.2 у меня.
Давайте новости на языке оригинала
Вы сейчас научите. Вон, еще один копипастер подтянулся - с github цитатку кинул как есть, на английском.
Читайте правила форума:
Официальный язык общения на сайте – русский. Исключение составляют только те, кто не владеет русским вообще и те, чей родной язык общения не является русским. В остальных случаях пользователи должны предоставлять перевод.
Всячески поддерживаю Сергея и его новости. Но если Вы “в теме” и знаете английский, не составит труда привести новость в оригинале, и рядом по-русски хотя бы парой фраз объяснить, что в ней нового и о чем она вообще.
Для новостей на английском мы все прекрасно можем сходить на rcgroups и пообщаться там.
Не исправили его еще?
Отвечу сам себе. Установил самую последнюю 2.1.2с . Так же срабатывает ФС без повода , и миник падает. Летал в 10 метрах перед собой. После установил ЛибреПилот , и всё стало нормально как и раньше.
Все таки нужно как это не нудно прошивать новые версии с затиранием старой ( Full chip erase ) Исправленные в коде изменения ( настройки сделанные им по умолчанию ) без этого не работают, на жалобы Борис пишет “Well when you flash it doesnt reset your settings. It means it still can use the old ones.” Прошивка не сбрасывает настройки и поэтому работают старые
www.rcgroups.com/forums/showpost.php?p=33138200&po…
Все его изменения в последних прошивках касаются настроек Level Многие это вообще не настраивают, Борис делает чтобы все работало по умолчанию.
PS Насколько я понял это началось с жалоб когда при вращении по Yow на висении квадрик заносило сильно в сторону, на видео отклонения были большие, причем если делать вращение медленно все было нормально, при быстром был сильный бросок в сторону. Народ считал настройки версии 2,11 хорошими, сейчас новая версия по поведению никак не должна отличатся от той 2.11 которая нравилась народу.
Полетал сегодня
понравилось прошивка BetaFlight больше чем стандартная cc3d
только по яву очень медленно вращается как увеличить скорость ?
и про пиды больше значения - лучше ?
скорости вращения - rate
например у меня по яву стоит 42, по остольным осям 50, и это довольно низкие скорости, у большинства больше
про ПИДы - лучше не больше, а правильно подобранные
и про пиды больше значения - лучше ?
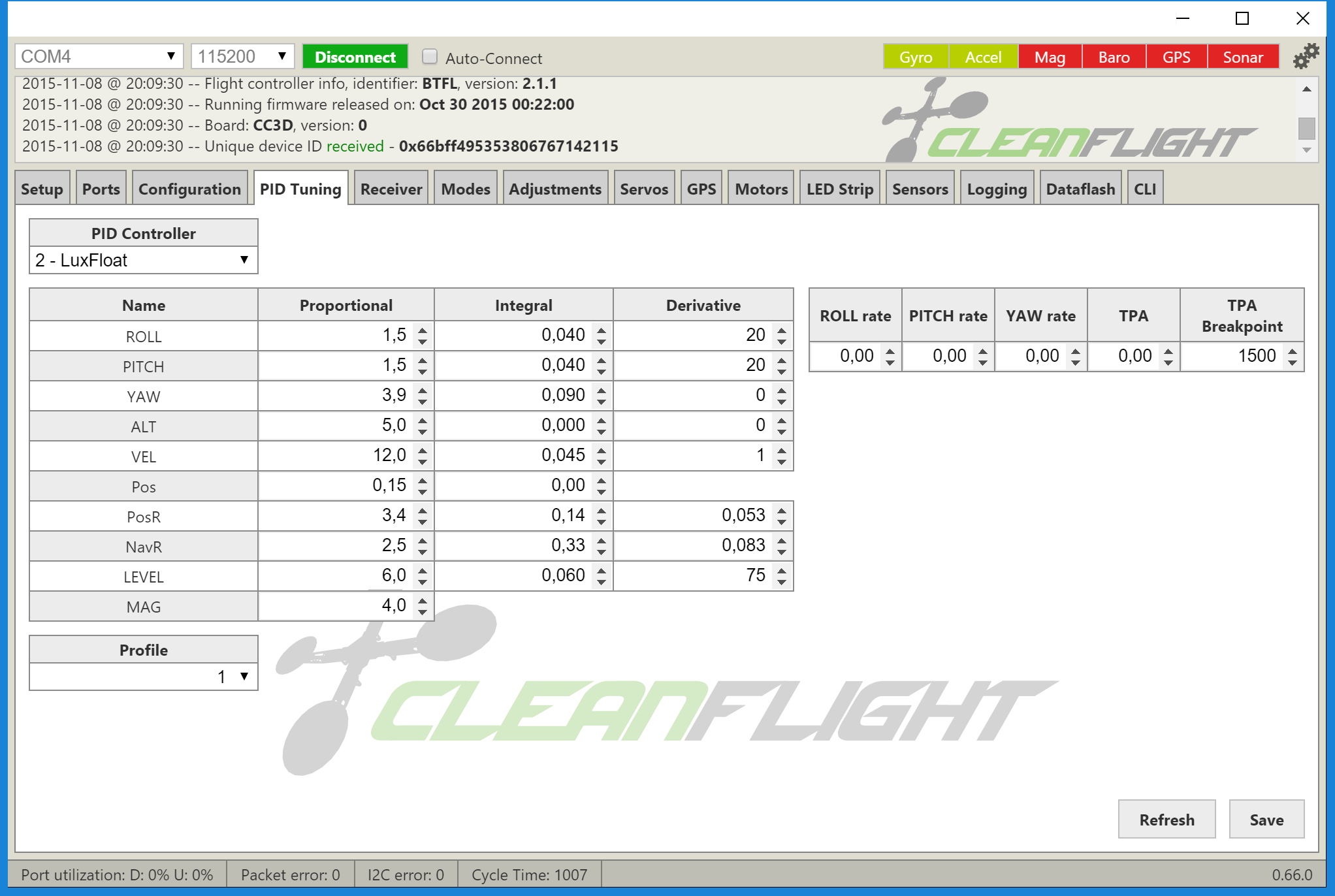
Да лучше. Цель прошивок Бориса это возможность задрать пиды как можно выше и уменьшить общее время реакции на внешнее воздействие ( te ) когда кривая загоняется в допустимые границы Steady state error и уже не выходит за эти границы. Суть прошивки на рисунке. Это в общем.
И правильно вам написали выше, увеличьте Yaw rate например поставьте 1.05 и плавно попробуйте
PS на видео по настройке в GTune пиды задрались аж мужики охнули, настроил свой квадрик будет погода выйду попробую, а до этого сделаю скрины что было и что стало. Еще усы антенн на приемнике выдернул пока верхнюю крышку снимал, усы были в затяжках…
Помню где то видел видео по настройке пидов через GTune, но теперь не найду. Не поделитесь ссылкой?
А раз так - то и не надо заморачиваться. Давайте новости на языке оригинала. Кому надо - переведёт гуглом. Кому сильно надо - изучит английский.
Кому сильно надо тот зайдет по ссылки официальных релизов Бориса и там на английском почитает, и гуглом там проще переводить, чем здесь через буфер в переводчик копировать. Здесь официальный язык русский, смысл суда репостить на английском.
Сам себе отвечу по поводу фейлсейва. Спрашивал тут
rcopen.com/forum/f136/topic430799/145
До этого всегда снимал галку фейлсейв в конфигураторе CleanFlight, чтобы при потере сигнала квадрик по инерции пролетел сколько то и потом снова возможно схватил сигнал и полетел дальше. Такой вариант отлично работал и на бетафлайте на всех версиях и на официальном клинфлайте с приемником d4r-II. Но на новом приемнике с sBus никак эта фича не работает. Моторы только сбрасывают обороты до холостых и продолжают вращаться при потере сигнала от аппы. (галка мотор стоп снята). В таранисе уже перепробовал все варианты, ничего не помогло. В итоге поставил галку фейлсейф в конфигураторе CleanFlight и стал работать штатный фейлсейф, когда при потере сигнала квадрик падает камнем и даже если сигнал уже снова появился, полет не восстановится. Нужно будет выдернуть и снова вставить питание чтобы приемник увидел таранис.
Читаю и удивляюсь отважным борцам с подключением приёмников по С-Бас. Столько заморочек с подключением через инвертор, с фаилсейфом.
Толи дело у меня с сателлитом Спектрум. Подключил и забыл. Никаких проблемм. 😃
Моторы только сбрасывают обороты до холостых и продолжают вращаться при потере сигнала от аппы. (галка мотор стоп снята).
Тут надо думать, анализирует контроллер пакет с признаком FS или просто выполняет команды, которые идут при FS. Если у вас FS запомнен как газ в 0, то что вы хотите от контроллера? Контроллер видит, что газ в нуле, обороты сбрасываются до холостых, ведь у вас галочки MOTOR_STOP нет. Вам помимо газа в 0 надо еще и коптер задизармить. И повесить арминг на тумблер и запомнить FS в приемнике, чтобы контроллер дизармился.
Если вы хотите, чтобы контроллер сохранял последнее значение газа, то надо приемник перевести в режим HOLD. Но это чревато, я бы не стал так делать.
Решение про флипы с минимальным газом относительно безболезненное: ставите галочку MOTOR_STOP и на отдельный тумблер делаете микс, который добавит немного газа, чтобы двигатели не останавливались. Можете совместить арминг и микс газа.
Если контроллер анализирует пакет с признаком FS, то тут уже мало что можно сделать, ибо все отдается на откуп программе контроллера. Борис что-то тестил и правил по этому поводу, но эта инфа мне осталась непонятной.
Установил самую последнюю 2.1.2с . Так же срабатывает ФС без повода , и миник падает.
Приемник тоже X4SB? Может спросить на рцгрупс?
Здесь официальный язык русский, смысл суда репостить на английском.
А я не против поста чейнджлога на английском. На эту тему я подписан и оперативно могу посмотреть важны изменения для меня или нет. Если не важны, то и прошиваться не буду.
Читаю и удивляюсь отважным борцам с подключением приёмников по С-Бас. Столько заморочек с подключением через инвертор, с фаилсейфом.
Выкинуть Таранис, купить Спектрум? А если бы траблы были со спектрумом, то поменяли бы на таранис/футабу или воевали дальше? Отсутствие/наличие инвертора это фиг знает почему. Не ясно, зачем Frsky не сделали такой же сигнал, как на оригинальной Futaba. Возможно чтобы не засудили.
Приемник тоже X4SB? Может спросить на рцгрупс?
нее. Приемник D4R с РРМ который.
Не ясно, зачем Frsky не сделали такой же сигнал, как на оригинальной Futaba. Возможно чтобы не засудили.
Тоесть получается этот переходник нужен только для приёмников Frsky с выходом С-Бас?
С оригинальными приёмниками от Футабы он не нужен?
К сожалению не могу ответить со 100% уверенностью. Мое мнение основывалось на догадках. Например, в LRS Expert указано, что нужно применять инвертор. Причем приемники не оговариваются. При этом на альтернативной прошивке к этой LRS полярность сигнала значения не имеет и определяется автоматически. Я и предположил, что LRS Expert принимает нативный сигнал от Futaba, а для остальных нужен инвертер.
Так же становится непонятным, зачем на той же Naze32 нет встроенного инвертера? Зачем заставлять пользователя подключать дополнительное оборудование?
Тоесть получается этот переходник нужен только для приёмников Frsky с выходом С-Бас?
С оригинальными приёмниками от Футабы он не нужен?
нет, для любого устройства s.bus и naze32 он нужен
тут информация про протокол s.bus на русском www.*************/ru/blogs/view_entry/536/
ключевой момент
… S.Bus – это не что иное как протокол передачи команд сервоприводам по цифровому последовательному порту…
Надо так же иметь ввиду, что сигналы шины, как во всех продуктах Futaba, инвертированы.
приемник X4SB формирует цифровой сигнал, и чтобы его превратить в s.bus - он его инвертирует (в нем есть инвертор)
у КП naze32 есть последовательный порт, но нет инвертора
следовательно есть 2 варианта:
- s.bus, который выдает приемник снова инвертировать и отдавать его КП - получаем двойное инвертирование
- отключить в приемнике инвертор, и следовательно он начинает выдавать сигнал до инвертации, что и является инвертированным s.bus 😃 ну и подключить его на прямую к naze32
по мене так второй вавриан на много проще и предпочтительней
Но на новом приемнике с sBus никак эта фича не работает. Моторы только сбрасывают обороты до холостых и продолжают вращаться при потере сигнала от аппы. (галка мотор стоп снята). В таранисе уже перепробовал все варианты, ничего не помогло. В итоге поставил галку фейлсейф в конфигураторе CleanFlight и стал работать штатный фейлсейф, когда при потере сигнала квадрик падает камнем и даже если сигнал уже снова появился, полет не восстановится.
я уже ранее писал что реализовывать ФС должен именно КП а не приемник, и что в приемниках эта фича появилась как костыль, как раз из-за того что ПК просто не использовали, а кто-то ее должен был реализовывать
в betaflight/cleanflight есть сдеующие настройки
feature FAILSAFE #собственно включение ФС
set failsafe_delay = 1 #задержка от момента потери сигнала до включения ФС
set failsafe_off_delay = 20 #время работы ФС
set failsafe_throttle = 1500 #значение газа при включенном ФС
это моя конфигурация (у меня naze32 и X4SB подключенный по инвертированному s.bus) и работает она так:
- если теряется связь приемник посылает сигнал ФС мозгу, КП посылает на моторы последнюю команду в течении 1 сек
- если в течении этого времени связь восстанавливается - приемник начинает передавать управляющие команды КП и полет продолжается в обычном режиме
- если в течении 1 сек управляющие команды не начинаю поступать - КП включает ФС
- ФС работает 2 секунды, значение газа устанавливается 1500 и коптер стабилизируется в горизонт (при этом газе мой коптер не быстро поднимается вверх, что дает шанс снова помать сигнал)
- если в течении этого времени связь восстанавливается - приемник начинает передавать управляющие команды КП и полет продолжается в обычном режиме
- если в течении 2 сек управляющие команды не начинаю поступать - КП включает дизармит коптер (глушит моторы)
заармить снова можно, но нужно подождать некоторое время (минуту или больше)
кстати данную конфигурацию я не рекомендую 😉, все таки самое безопасное - это сразу выключать моторы:
set failsafe_delay = 1
set failsafe_off_delay = 50
set failsafe_throttle = 1000
set failsafe_throttle = 1000 а у тебя при таком значении разве движки не выключаются сразу???
тут информация про протокол s.bus на русском www.*************/ru/blogs/view_entry/536/ ключевой момент
В той статье фраза
как во всех продуктах Futaba, инвертированы
относится именно к тому, что за ноль там принята единица, а за единицу принят ноль. Если принять во внимание, что sbus пошел от Futaba, то его сигнал можно считать эталоном и следовательно он неинвертированный (нормальный, стандартный). Другими словами “большинство продуктов учитывают особенность реализации sbus на Futaba, потому не нужно применять инверторы сигнала для работы с приемниками этой фирмы”. Так?
Тогда зачем на приемниках Frsky ставится инвертер и он уже не совместим с сигналом от Futaba. Приходится или еще раз инвертировать сигнал, или брать сигнал до встроенного инвертора, или реализовывать программное распознавание полярности сигнала и правильную его обработку.
Главный вопрос: к Naze32, в которой нет инвертора, Futaba’вский приемник подключается без инвертера?
set failsafe_throttle = 1000 а у тебя при таком значении разве движки не выключаются сразу???
Так он про что и пишет
все таки самое безопасное - это сразу выключать моторы:
Главный вопрос: к Naze32, в которой нет инвертора, Futaba’вский приемник подключается без инвертера?
Нет!у меня футаба 10j
Тогда зачем на приемниках Frsky ставится инвертер и он уже не совместим с сигналом от Futaba.
все это я написал в прошлом посте, но попробую другтми словами:
в приемниках FrSky инвертор как раз ставится что бы сделать Футабовский s.bus (“как во всех продуктах Futaba, инвертированы”)
в naze32 нет инвертора и она s.bus не понимает (хоть FrSky хоть Futaba)
т.е. нормальный сигнал, который генерируют и понимают устройства как раз и есть - инвертированный s.bus
set failsafe_throttle = 1000 а у тебя при таком значении разве движки не выключаются сразу???
в своей конфигурации я не глушу движки (set failsafe_throttle = 1500), но решение спорное и мой личный выбор, самое правильное/безопасное решение - глушить сразу, это я и написал в рекомендуемой конфигурации (set failsafe_throttle = 1000 )
Все, теперь въехал. И зачем головняк такой устроили? Ну вывели бы хотя бы опцию в cf/bf типа “Инвертировать sbus” сигнал. Думаю это несложно сделать программно.