Прошивки CleanFlight/BetaFlight для полетников

Как вы себе это видите?
Если комара и или муху пытаешься отогнать в полёте это уже краш с вероятностью 99,9%.
Ну для этого коптер должен в стабе висеть четко. Чего у мя пока не получается настроить. Думаю и в акро можно, если забраться повыше:-)
Вышедший Betaflight 3.0.0-RC1 впечатляет размахом - 42 таргета!
Вышедший Betaflight 3.0.0-RC1 впечатляет размахом - 42 таргета!
И в нем есть “STM32 F4 support (working blheli passthrough)” чего нет в рейсе и сделал “New Betaflight PID controller based on deg/sec” то что было в рейсе
И в нем есть “STM32 F4 support (working blheli passthrough)” чего нет в рейсе
ну как же нет, есть и даже лучше, можно шить, можно менять настойки регулей прямо из конфигуратора, сейчас вот оптимальные дефолтные настройки под каждый регуль обещают в конфигуратор добавить.
А c версии RC (ver 1) поддерживают коннект с ПО blheli как и BF
Или я чего-то не понял?
Ну а так новость прекрасная для владельцев F4! Буду пробовать.
Спарки конечно нет в списке…
Спарки конечно нет в списке…
А тот Sparky, который есть в списке, это только для первой версии?
ну как же нет, есть и даже лучше, можно шить, можно менять настойки регулей прямо из конфигуратора, сейчас вот оптимальные дефолтные настройки под каждый регуль обещают в конфигуратор добавить. А c версии RC (ver 1) поддерживают коннект с ПО blheli как и BF Или я чего-то не понял?
Все так, но здесь я могу свои пчелы прошить новой прошивкой запросто, в рейсе их просто нет ( не получилось, да и есть уже случаи когда их способ превращал ESC в кирпич ). Это я писал в ветке про оптимальные настройки которые хотят добавить в рейсе, а еще если там ESC не поддерживается просто не должна появляться кнопка Flash итд Мне кажется у Бориса это проще, в рейсе проще если работает иначе тупик ( на примере пчел ) Когда мне придут новые ESC проблема исчезнет, а на сегодня прошьюсь на прошивку Бориса, обновлю прошивку и снова на рейс, как то так.
В новой прошивке Бориса уже пошли изменения ( 3 версия )
Убрали
pidProfile->D8[ROLL] = 18; - pidProfile->P8[PITCH] = 50; - pidProfile->I8[PITCH] = 55; - pidProfile->D8[PITCH] = 22;
Сделали так
pidProfile->D8[ROLL] = 25; + pidProfile->P8[PITCH] = 60; + pidProfile->I8[PITCH] = 60; + pidProfile->D8[PITCH] = 30
Убрали
masterConfig.gyro_soft_lpf_hz = 80;
Сделали так
masterConfig.gyro_soft_lpf_hz = 100;
Это изменения от самого автора
github.com/betaflight/…/v3.0.0-RC1...master
PS Попробовал прошиться в рейсе ( пчелы ) думал что то может пропустил. Не получилось. В проге BLHeliсюит тоже не получилось.
А тот Sparky, который есть в списке, это только для первой версии?
То на F3, а спарки2 на F4.
PS Попробовал прошиться в рейсе ( пчелы ) думал что то может пропустил. Не получилось
По этой причине не припаиваю провода регулей. Иногда и через бф не получается подключиться.
подскажите как настроить hub телеметрию на cc3d. приемник frsky RX порт подключен к 4 RC пину на мозге (4 SoftSerial1 TX / Sonar trigger).
В конфигураторе включил Telemetry, но ничего не приходит. что еще надо включить? softserial может? и на вкладке Ports нужно включать где то телеметрию?
По этой причине не припаиваю провода регулей. Иногда и через бф не получается подключиться.
У меня и после прошивки на 3 версию от Бориса не получилось. Но зато попробовал зависнуть сначала на рейсе, а после прошивки на новой 3 версии от Бориса.
Ни разу не жалею что ушел на рейс. Конечно испытание так себе, я поднимаю квадрик и иду по комнатам сзади квадрика стараясь не врезаться в дверные проемы. На рейсе все получается, на бета два шрама на дверях.
На бета нужно чуть угадывать, на рейсе он влитой, куда дернул, то и получил…
подскажите как настроить hub телеметрию на cc3d. приемник frsky RX порт подключен к 4 RC пину на мозге (4 SoftSerial1 TX / Sonar trigger).
В конфигураторе включил Telemetry, но ничего не приходит. что еще надо включить? softserial может? и на вкладке Ports нужно включать где то телеметрию?
Да, надо софт порт включить и настроить.
www.dronetrest.com/t/…/1400
И вышла Betaflight 3.0.0-RC2 (F4 Support)
Внесли изменения о которых писал выше
github.com/betaflight/betaflight/releases
То на F3, а спарки2 на F4.
Может быть это на оба? Если распиновка f3 и f4 одинакова. Таргеты только распиновкой отличаются.
Ладно бы они хотя бы одинаковые были внешне, а то и дизайн платы у первой спарки своеобразный. Не думаю, что там что то универсально)
Совсем мы не заметили во внушительном списке прошивок F4BY - плату для ардукоптера из другого раздела =D
F4BY - плату для ардукоптера из другого раздела =D
я сделал HAL (железно-абстрактный слой, там довольно удобно это сделать под практически любое железо) и попросил добавить, люди добрые - не отказали…
Поставил бетафлай 3.0 и проверил работу режекторного фильтра. Тк движки коптера что мне дали попользоваться уже изношенные и сильно шумели на 2.9 приходилось летать с луптаймом 1000/1000, при повышении начиналась дерготня по осям:
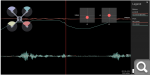
Вибрации были на ~250 герцах, соответственно обычный lpf фильтр давил их слабо. Настроил режекторный фильтр:
gyro_notch_hz = 250
gyro_notch_cutoff = 130
dterm_notch_hz = 250
dterm_notch_cutoff = 130
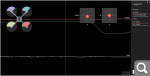
И получил результат:
В общем, поставил другой мозг (flip32), взял у другана на проверить. Залил ту же версию, настроил все так же, единственно решил оставить по умолчанию мин/макс тротл, и мин комманд.
И о чудо. Полетал визуально в стабе. Именно полетал, а не повисел судорожно на ручке. Полетал в акро в очках, опять же именно полетал, и посадил по собственной инициативе к ногам. Летал почти четыре минуты. Вчера в очках ,с моим мозгом, за полторы минуты два раза упал, из за непонятного глюка, типа газ в пол, а оно снижается.
При условии, что на коптерах я до этого, можно сказать, не летал, думаю показатель.
Так что ИМХО либо в сборке под cc3d которую использую косяк, либо кетаец положил в кит неисправный мозг…
Настроил режекторный фильтр:
Кстати два фильтра, режекторный и lpf на каждой из осей очень хорошо грузят микроконтроллер. На f3 заработал луптайм 4000/2000, 4000/4000 вешал мк. А значит контроллеры на f4 становятся актуальными.
Кстати два фильтра, режекторный и lpf на каждой из осей очень хорошо грузят микроконтроллер. На f3 заработал луптайм 4000/2000, 4000/4000 вешал мк. А значит контроллеры на f4 становятся актуальными.
И контроллер грузят и задержку добавляют. В рейсе (RF ) есть выбор от полной фильтрации, до ее отсутствия (с буквой U например UH32)
И обновили Betaflight 3.0.0-RC3 Сделали настройки по дефолту основываясь на отзывах пользователей , добавили параметры конфига итд
Парни, подскажите пожалуйста по настройкам.
Стоит такая ПДБ: banggood.com/Matek-LED-POWER-HUB-5in1-V3-Power-Sup…
Она управляется как серва с приёмника. Можно с пульта включать пищалку и светодиоды.
Но у меня сателлит Спектрум и нет выхода на серву.
Вроде как то можно в бетафлае включить возможность назначить на какой то из выходов моторов управление с тумблера передатчика?
Мозг на F3.
Парни, подскажите пожалуйста по настройкам.
Стоит такая ПДБ: banggood.com/Matek-LED-POWER-HUB-5in1-V3-Power-Sup…
Она управляется как серва с приёмника. Можно с пульта включать пищалку и светодиоды.
Но у меня сателлит Спектрум и нет выхода на серву.
Вроде как то можно в бетафлае включить возможность назначить на какой то из выходов моторов управление с тумблера передатчика?
Мозг на F3.
походу так, set enable_buzzer_p6 = ON (6 канал)