Диапазон колебаний оборотов в режиме гувернера

С момента покупки логгера eLogger V3 пытаюсь найти эмпирический метод определения оптимальных значений частоты ШИМ и угла опережения для различных бесколлекторных двигателей. Т.е. для случаев, когда производитель не указал рекомендуемые значения.
Изыскания натолкнули меня на интересную зависимость частоты колебаний оборотов по полю от напряжения питания и от заданной частоты. Мне нужно ваше мнение, частный ли это случай у контроллера Markus SL45, или это известная фича.
Итак, выявлены следующие зависимости:
-
Чем выше напряжение питания, тем больше диапазон колебаний оборотов. Это наглядно видно на графике, с падением напряжения батареи обороты удерживаются более точно:
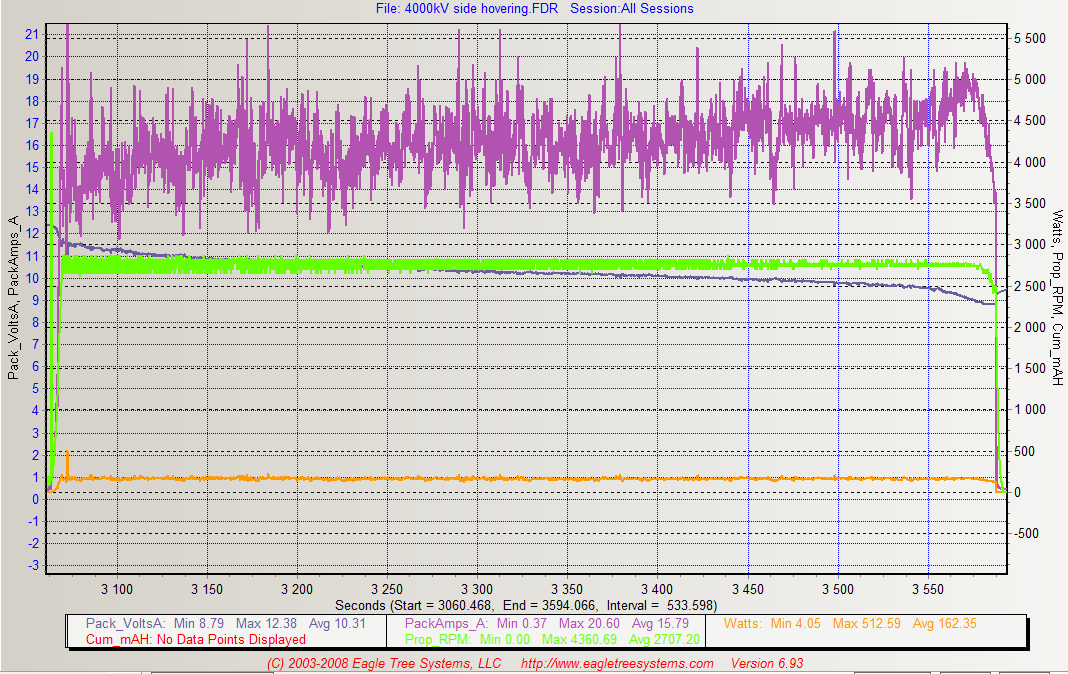
Картинка кликабельна. -
Чем выше частота ШИМ, тем меньше диапазон колебаний оборотов.
-
Диапазон колебаний оборотов зависит от заданной частоты вращения поля.
Существует несколько стабильных уровней. Поясню это на примерах.
Я подключил двигатель, батарею 3S, логгер в режиме Live Mode, выставил на контроллере режим Governor High RPM и стал плавно изменять сигнал газа, фиксируя значения по 5 секунд. В результате получился вот такой график.

Нас интересует малиновый график, он указывает обороты двигателя. Обороты по полю в три раза выше, т.к. у меня шестиполюсный двигатель.
На этом графике я отметил стабильные уровни зеленым, а расколбас - желто-красным.
Вот увеличенное значение зоны 1:

Хорошо видно насколько стабильно держатся обороты. Частота по полю составляет примерно 108700 об/мин.
А вот участок графика 2-3-4:
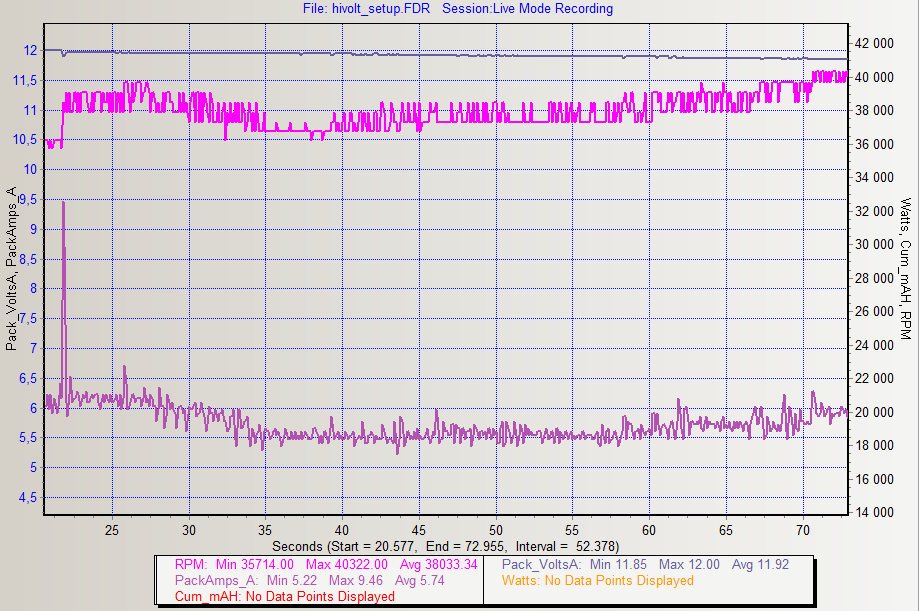
Там видна еще одна полочка на частоте поля 110400 об/мин, остальное имеет сильный диапазон колебаний.
Вот участок 5:
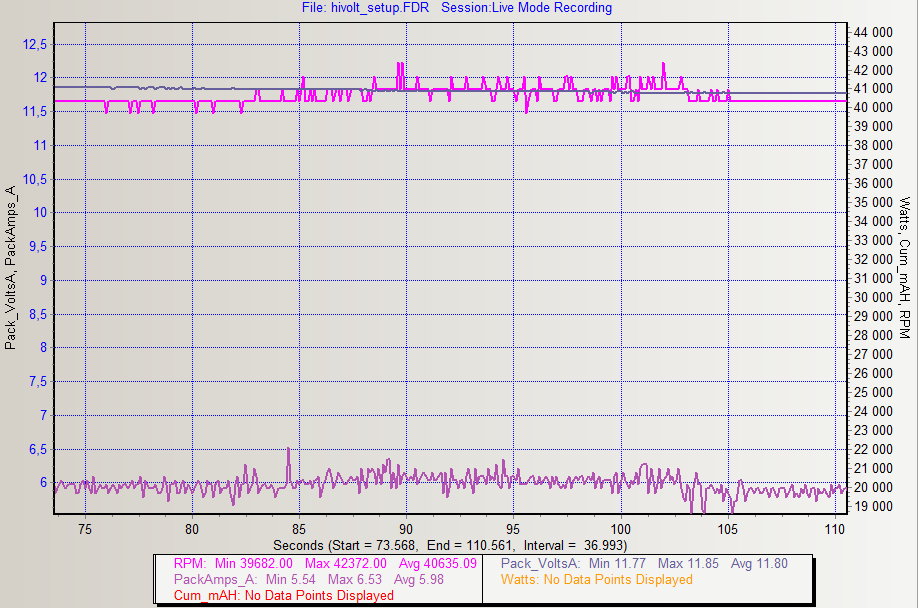
Полочка на частоте поля 121000 об/мин. Выше - расколбас.
В результате я нашел три стабильных участка: 108700, 110400, 121000 об/мин. Разница между ними 1700 и 10600 об/мин соответственно. Для двигателя с 6-ю полюсами и шестерней 11T на роторе будет примерно 2650, 2700 и 2960 об/мин.
Если поставить батарею 4S, то результаты будут совершенно иные. Замечено, что гувернер оптимально держит обороты, когда скважность импульса с контроллера в пределах 75-85%, т.е. для 3S это примерно 9 Вольт, для 4S - 12 Вольт. Исходя из этого надо считать обороты двигателя исходя из kV и потом подбирать шестеренку на двигатель в зависимости от желаемых оборотов на роторе.
Меня интересует мнение гуру по поводу п.3. Это баг или фича? 😃 Очень бы хотелось услышать мнение AlexSr и AlexN.
Заранее спасибо!
Как я понял Вас интересует (и измерялся) вариант сугубо с гувернёром.
Тогда есть такие обьяснения:
- гувернёр работает по такому же ПИД алгоритму, что и любой гироскоп. Значит и поведение его, очень похоже.
1 - Напряжение питания. Точно так же, как и хвост возбуждается больше на свежей батарее, так же и гувернёр. Больше напряжение - больше момент двигателя, соответственно имеем бОльший коэф. в цепи обратной связи. Это - нормально.
2 - ШИМ. Чем выше частота шим - тем точнее (при той же разрядности) регулируется подводимая к двигателю мощность. В аналогии с хвостом - это люфты в тягах. Чем они меньше, тем выше может стоять чувствительность гироскопа. Или, разрешение сервы …
3 - "Диапазон колебаний оборотов зависит от заданной частоты вращения поля.
"
Тут однозначно, с ходу ответить сложно, но предположу, что на таких частотах уже сказывается время обработки сигналов микропроцессором. Вполне возможно, из за набегающей ошибки (измерения временных промежутков) получается некоторый “стробоскопический” эффект. Когда на определённых диапазонах точность работы гувернёра возрастает, а на других - падает.
Как то так… 😃
Я конечно не гуру, но по моему такие незначительные колебания - это фича, т.е нормально для маленьких моторов. И дело даже не в гувернере, без него будут те-же самые колебания (только обороты будут потихоньку падать). Да и точность (сенсоров) логгера не идеальная.
У говернеров, как и у гироскопов есть gain. Сделаешь большим (если есть регулировка) - будет хвост водить.
Я, к сожалению, пояснений дать не смогу, т.к. гувернер у меня выключен.
Спасибо за пояснения. Для меня вырисовываются преимущества идеального регулятора со удержанием оборотов перед обычными.
- Контроллер должен корректировать чувствительность гувернера в зависимости от напряжения питания.
- Контроллер должен автоматически менять частоту ШИМ (в установленных пределах) в зависимости от напряжения питания и от требуемых оборотов гувернера.
- Контроллер не должен иметь накоплений статистических ошибок при разных режимах работы. Это вообще похоже на неточность в программе контроллера.
Идеально вообще стандартизовать параметр чувствительности гувернера. Типа 0 - вообще не реагирует на возмущения, 50 - корректирует обороты по полю в пределах ±1000 об/мин, 100 - в пределах 10 об/мин. Было бы идеально. 😃
Мне кажется, все три пункта можно реализовать доработкой софта. Было бы отлично, если бы Марк реализовал эти функции в своих контроллерах. Тогда преимуществ у Контроников не было бы никаких.
Если честно, то мне непонятно, к чему все эти графики для вертолета стоящего на столе - они идеальные. Гораздо интереснее насколько хорошо гувернер выдерживает обороты под нагрузкой. Да и вообще, когда хочется популять, понимаешь, что самое слабое место - это батарейка.
Сделал полетные тесты.

Разброс колебаний оборотов во всех режимах примерно одинаковый. По сравнению с колебаниями CC45 в другой теме Markus просто молодец. Интересно бы увидеть аналогичные графики Контроника.
Вот. Для примера можно смотреть, но от стиля полета сильно зависит. Зеленый график. Взято с Хелифрика.
По сравнению с колебаниями CC45 в другой теме Markus просто молодец.
Теперь обороты на СС45 выглядят так:
Мда, Маркус лучше держит обороты, чем CC45. А я был недоволен точностью Маркуса. 😃 Но все познается в сравнении. 😃 Пока качество гувернера в контроллерах распределяется следующим образом:
- Контроник.
- Маркус.
- Кастл.
Надо еще найти графики режимов гувернера для других контроллеров.
ИМХО, учитывая разный масштаб графиков, все контроллеры здесь представленные держат обороты достойно. Контроник ничем особо не выделился. Сами посмотрите - те же ± 200 оборотов.
Я больше смотрел на удержание оборотов при спокойном полете. Дело в том, что при силовом пилотаже на передний план выходит батарея, и контроллер мало что может сделать, если батарея не дает достаточно тока.
Так вот, при спокойном полете у Контроника разброс не более 10 об/мин, полочка почти прямая, хотя график низкого качества, видно плохо. Маркус держит обороты в аналогичных режимах с точностью ±20 об/мин.
А вот CC45 без нагрузки держит обороты в пределах ±40 об/мин, да и переходные процессы при смене полетных режимов очень странные, очень сильное перерегулирование.
Здравствуйте,
В поисках идеального гувернёра, ловля блох какая-то: ±10, ±20. Кто же точнее в спокойном полёте?
Определит фотофиниш.
На мой взгляд, если на слух не слышно изменение оборотов при средних нагрузках – гувернёр нормально держит. Разницу в 10-20 оборотов не слышно почти, 40 уже заметно. Вывод - продолжайте настраивать СС45 )).
Да и вообще, нужна уж такая точность?
P.S. Я согласен! Из всех гувернёров - батарея важнее! Шагов поддашь и пофигу на точность, лишь бы бобик не сдох.
На самом деле тема создавалась для понимания тонкостей работы гувернера, но скатилась в поиск наиболее точной модели. 😃
Лично для меня такие сравнения и обсуждения очень интересны. Чем ближе работа гувернера к идеалу, тем легче делать выбор при следующей покупке контроллера.
А у меня вопрос: должен ли иметь запас по оборотам двигатель для правильной работы гувернера? Я так понимаю что большинство гувернеров работают в диапазоне от 50 до 90 процентов хода газа.
Сугубо личное мнение, но мне кажется что большее значение имеет не “точность” и абсолютные значения оборотов (их просадок), а “качество работы”.
Что под этим понимается в виду:
- отсутствие перерегулировок (возбуждения, дёрготни оборотами, “плавания”).
Пусть уж лучше обороты просядут на 5%, но плавно и предсказуемо, чем они будут в совершенно неизвестный момент времени “дёргаться” и “плавать”. Мешая работе гироскопа, да и просто - отвлекая пилота и не давая сосредоточиться на управлении.
P.S. Вот по этому - летаю на кривых 😁
Не, ну когда обороты плавают без нагрузок, это конечно не порядок. Здесь нужно дальше копаться, да.
Пользую на 450-м рексе, стоковый мотор, 12 шестерню, СС45 в режиме Setrpm 2850. Ничего не плавает, гудит ровно. Правда прошивку не обновлял на последнюю, там грят настройки немного менять надо. А я вот настроил один раз и летаю. Сосредоточился на крашах, про регуль забыл.
А про следующую выбор и покупку регуля мне видется так. Поженился уже на Фениксе, и шнурок есть и интерфейс освоил. Зачем нового пробовать?
Маркус наверно хорош, и ладно. Больше компаний, хороших и разных. Пусть конкурируют, тогда и мой Кастл чё-нить улучшать не перестанет.
Эт как и во всём, завелись в хозяйстве причиндалы от Футабы, нафига пробовать JR ?
В догонку.
Знаете как я выбирал регуль? Не что точнее из графиков, нет. Решил, всё еду за маркусом, но в субботу магазин не работал а (горит же!) Кастл сегодня купить ещё успеваю, значит беру другого претендента.
ИМХО, учитывая разный масштаб графиков, все контроллеры здесь представленные держат обороты достойно. Контроник ничем особо не выделился. Сами посмотрите - те же ± 200 оборотов.
Как-то в теме про Гиперион Г3 я постил свои логи
Trex450, Scorpion 2221-8, Kontronik 55 6-18,Hyperion G3. Обороты уходят больше, чем +/-25 только на запредельных нагрузках.
Как-то в теме про Гиперион Г3 я постил свои логи
А есть по-крупнее картинка?