Spirit Flybarless system - что это за система?

на квадриках авто приземление реализовано шикарно. почему на вертах не получится?
на квадриках авто приземление реализовано шикарно.
С ультрозвуковым высотомером???
Кто первый авто приземлится? если можно видео в студию!
С ультрозвуковым высотомером???
а я хрен его знает.
- Автопосадка - как должно работать описано в мануале
Прикольно.
Ждите в следующем обновлении:
- авто взлет;
- полет по точкам;
- круги;
- воронки;
- пирофлип;
- тик-так;
- петля;
- автопосадка на ротации.
Из машины можно не выходить 😁
Из машины можно не выходить
Не, надо идти дальше. Говоришь ему: “Ну иди, полетай” - он сам с дома вылетает. Полетает где-нибудь, налетается и домой вернется.
А если серьезно, то спирит значительно повысил “крашеустойчивать” из-за ошибок пилота, что делает вхождение в хобби для новичков менее затратным.
на квадриках авто приземление реализовано шикарно. почему на вертах не получится?
И на неровную поверхность? Если булыжник попадётся или вдруг человек рядом окажется?
Обновился. Что сразу бросилось в глаза в проге:
- Слетели функции в каналах. При восстановлении из бэкапа подхватились снова;
- Теперь функций можно поставить 6 штук, а не 3 (если память не изменяет). Раньше сразу показывались все строки, возможные для назначения функций. Теперь они появляются по мере назначения этих самых функций;
- Раньше мне не давало 2 функции повесить на один канал, теперь дает;
- Ну как сказано в обновлении, теперь можно оперировать 16-ю каналами;
- По Wi-Fi связь теряет постоянно, раз пару-тройку минут. Эта проблема была у меня и раньше.
И на неровную поверхность? Если булыжник попадётся или вдруг человек рядом окажется?
Давайте в крайности не кидаться. Не с закрытыми же глазами садиться. Подлетели к нужному месту для посадки, активировали функцию. Система автоматом начинает удерживать позицию и садиться. С тем же успехом можно и самому сесть на булыжник. У квадриков много всего завязано на GPS и вспомогательную электронику.
И все-таки у квадриков другие функции (кроме гоночных). Квадрики, как правило, используются как средство для достижения цели (“летающий штатив”). А вертолеты - это спортивный/хоббийный снаряд. Поэтому на квадриках оправдано вкладываться в разработку электроники автоматического управления, а на вертолете это просто никому не надо, так как пропадает сам смысл вертолета. Ну и плюс сравните продажи квадриков и вертолетов. Отличается даже не на порядок, а значительно больше.
Если булыжник попадётся или вдруг человек рядом окажется?
вы же не с булыжника взлетаете и не с человека. вы попутали посадку с автовозвратом. саша правильно написал, подлетел, включил, сел.
Ждите в следующем обновлении:… Из машины можно не выходить
Не нужно завидовать.😃😃😃
- Привет, ты кто?
- Я Вертолетчик!
- А система какая?
- Спирит Геолинк!!!
- Так с кокого ты тогда вертолетчик? Ты просто оператор автоматической системы управления вертолетом! Ну, типа как пилот современного пассажирского лайнера, только на кнопки нажимаешь!!! 😁
…😁
Ни чего не скажу, крутая система, только как же с ней теперь траву то косить?
hadov, а я не пишу ни Вам, ни Игорю наоборот, так как все настроено, работает, летает и спасает 😉
вы же не с булыжника взлетаете и не с человека. вы попутали посадку с автовозвратом. саша правильно написал, подлетел, включил, сел.
И в чем тут авто?
И в чем тут авто?
Так в этом, что он сам садится. Я первый раз сел на большом вертолете (Игорь и Геннадий в курсе моих первых 2-х “удачных” вылетов) сам так, что шаськи в разные стороны разлетелись (утрирую, но лопнули), сразу не заметил. А потом смотрю в воздухе шаськи на 90 градусов повернулись и висят на одном болтике. Так и садился на пузо, долго думал как сесть так, чтоб носом вперед не уйти и лопасти не раскромсать (первый вылет на новых лопастях был). Правда, в этот раз сел уже аккуратно носом на небольшой холмик. Лопасти от земли были в нескольких см, а так бы пришлось за 2 вылета менять 2 раза лопасти.
Так вот автопосадка позволяет избегать перегрузок в момент касания земли, если неверно подобрана скорость. С тех пор, тьфу-тьфу, падений больше не было. А уже около 5 часов полетов на этом вертолете. Кстати, спирит меня один раз спас. Потерял ориентацию, думал верт ко мне хвостом, а он наоборот. В итоге вместо выравнивания завалил его на бок. В целом уже начал его выравнивать, но тут сработала спасалка. Пока что это был единственный раз потери ориентации.
P.S. А малька совсем забросил, неинтересен он мне стал. Поставил на него все апгрейды, купил хорошие аккумы, а так ни разу в воздух его не запустил после этого. Погода сейчас не очень хорошая по полям шастать с большим вертом, думаю, начну с мальком по местным дворам “шкериться”.
Попробовал Автопосадку
Прикольная штука
Активировал на 2х мерах,верт стабилизировался и стал медленно опускаться
коснулся шаськами земли и немного на 10 см примерно подпрыгнул и так 2 раза и преземлился ровно,спокойно)))
Если совсем потерял орентацию верта из вида ,то это хорошая приблуда!
Если совсем потерял орентацию верта из вида
Тогда уж лучше возврат домой, а то не известно над чем он начнет садиться 😃
Кстати, а не появилось ли теперь в качестве failsafe возврат домой и посадка?
Доброго времени суток, Форумчане!
Хочу поделиться опытом создания WiFi -Link для Spirit своими руками, вдруг кому будет нужно.
Еще в прошлом году я приобрел uSpirit для мелкого вертолета. Постоянно дергать провод для настройки мне не хотелось и я стал смотреть, что же это такое WiFi-Link. На фото на официальном сайте сразу был опознан ESP8266, а по фото интерфейса веб морды было предположено, что прошивка основана на Esp-link. Скачав программу обновления, я нашел в ее ресурсах два файла user1.bin и user2.bin.
Было решено собрать WiFi-Link на базе esp12f от ai-thinker.
Необходимо прошить прошивку от Esp-link с разделом user1.bin от Spirit
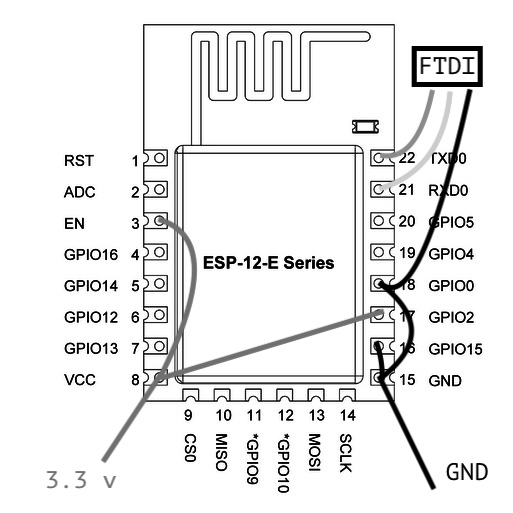
- Нужно перевести esp12f в режим получения прошивки.
Для это нужно CH_PD и GPIO2 подтянуть к питанию, GPIO0 и GPIO15 на землю. - Далее к FDTI адаптеру подключить TX, RX, GND по схеме TX>TX, RX>RX, GND>GND. Если у Вас адаптер имеет 3.3 вольта, то питание Esp можно взять от него, иначе нужен DC-DC преобразователь. Вот схема.
- Теперь при подключении ESP будет уходить в режим заливки прошивки. Нам нужно скачать прошивку Esp-link, Прошивальщик nodemcu-flasher из папки win\release и программу прошивки WiFi-Link от Spirit тот что для Линукса. Там будет папочка firmware, она нам и нужна.
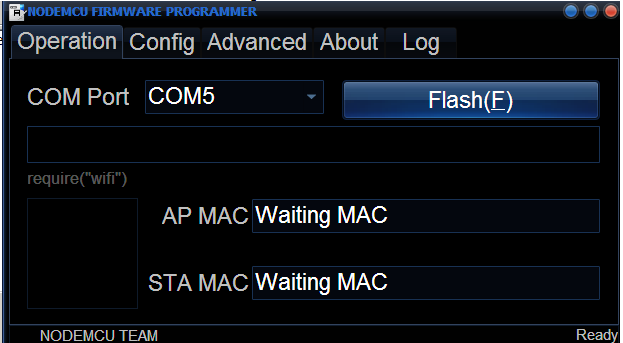
- Теперь подключаем наш ESP через FDTI к компьютеру и запускаем nodemcu-flasher:
- Переходим во вкладку advanced выставляем все как на картинке ниже:

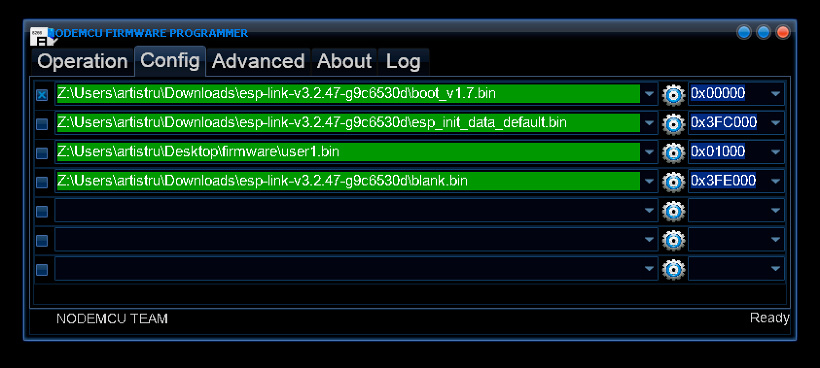
- Теперь на вкладку config. Тут нужно указать пути к файлам прошивки и проставить адреса их записи в ESP. Берем файлы из скаченной прошивки Esp-link кроме user1.bin и user2.bin. User1.bin берем из программы прошивки от Spirit (из архива из папки firmware) и расставляем адреса как на картинке ниже. Очередность не важна. ВНИМАНИЕ: На против каждого пункта нужно поставить крестик, иначе этот файл не будет прошит.
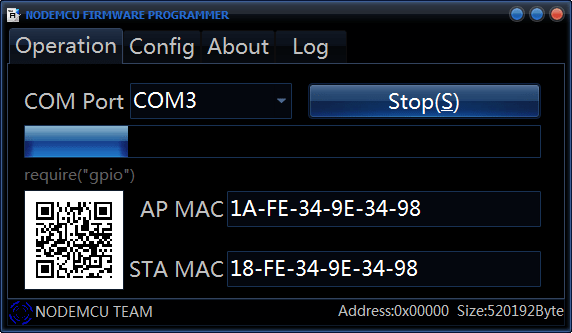
- Далее возвращаемся на главный экран и нажимаем Flash. Если все верно подключено то увидим такую картину:
- Далее подключаем наш WiFi-Link по официальной схеме к Spirit Fbl.
RX>RX, TX>TX, GND>GND, питание к рейке питания Spirit если есть DC-DC, иначе к SAT порту, где есть 3.3 вольта.
ВНИМАНИЕ ESP потребляет только 3.3 вольта.
Теперь можно подключаться к Spirit по воздуху, это подробно расписано у них на сайте
Вот и все) Задавайте вопросы, если что-то непонятно я описал. Я с удовольствием отвечу.
Спасибо за внимание!
Ребята снова по мелочи обновили spirit-system.com/phpBB3/viewtopic.php?f=19&t=3013…