Долгожданный Brain2

тарелка начинает свош армы тереть
Я в 500ке их подрезал.
Я в 500ке их подрезал.
У меня они подрезались автоматически)
В скукуме прикол есть. Там есть разные интерфейсы в проге для настройки типа базовый, продвинутый и про. Если он сам по каким-то причинам поставит базовый, то он делает одинаковый цикл по элерону элеватору, так как в базовом их разными нельзя сделать. Я не мог понять, че верт такой тупой стал. По элерону норм, по элеватору унылый при резких движениях.
Мне не понятно почему у вибара именно циклик РИНГ. Вертолет имеет разные моменты инерции по осям.
Потому что у VBar это происходит автоматически .
Если не хватает цикла по какой нибудь оси “оптимизатор” выровняет контур , в Брайне это требуется делать вручную - регулируя PID
Это везде происходит автоматически)
PID это не лимиты. PID настривает на сколько четко это происходит автоматически. Просто в вибаре эти значения пида забиты производителем. В брейне, как я понимаю, можно не лезть в экспертные настройки просто ползунок подвигать и все бодро будет. Никакой магии в вибаре нет
Вот как там увеличить лимиты я точно не знаю, если надо больше 8. Циклик рингом или как там.
Как и у всех других вертолётов .
Пример :
Лого 500- 550-600- 690 Циклик ринг =85 ( дефолтное значение)
Лого 700-800 Циклик ринг = 95
Меняя геометрическую установку 8 гр. можно обмануть систему и сделать вертолёт более агрессивным . ( это примерно тоже самое что отвечал OTS Игорю. - “длялохов”😃)
И кстати на Лого 700 топы ставят 11-12гр , думаю что из-за особенности механики .
Вот что пишут пилоты Микадо :
Part of the whole 8 degrees test is to help the pilot evaluate during the set-up of his heli whether the geometry of his particular machine is not too far out-of-wack. Remember V-Bar has to work with ALL helis…at least they try to help that happen by prompting the issue in the cyclic set-up menu. Too much or too little cyclic when performing the set-up test, can indicate the geometry is out-of-bounds, and the V-Bar’s full potential can’t be reached unless the geometry is “in-bounds”.
With Mikado helis, you KNOW the geometry is optimized for the V-Bar, so going higher than the 8 degrees isn’t immediately going to cause problems.
But…part of why experienced pilots can get away with having so much cyclic pitch, is they’ve learned to “manage” the collective and cyclic inputs. If you go to full collective (12+ degrees), and add in another 12 degrees of cyclic (24 degrees total), then unusual things start to happen, because the blades are WAY past their stall angle-of-attack, blade drag goes WAY up, and…
So I don’t recommend setting such high cyclic rates, just to see what happens when you bury the sticks in the corners.
Head dampening, agility and gain settings all play into the “set-up”, and are dependent on each other to make the V-Bar and the heli play well together. Kyle developed the numbers after LOTS of experimenting, and in the end, they work for him, but are by no means THE only way to set the machine-up to fly well.
PID это не лимиты.
Какие лимиты , ты хоть понял что написал )
Лимиты уже в максимуме , нужно выровнять контуры вращения .)
Я отлично понимаю о чем говорю, может, не понял, что ты говоришь. Фбл автоматически только скорость вращения дает, ничего она не оптимизирует. PID - параметры переходного процесса, которые характеризуют вид графика как твой цикл изменияется от нуля до Х. Пид параметры скрыты, ты крутишь один из них или их связку. В полете они не меняются. Что такое контуры вращения, это что за термин такой?
Может, я что-то не догоняю. Надо гоянуть что делает этот ринг. По идее это тупо лимит цикла
В брейне цыклик настраивается раздельно по элерону и элеватору, скорость переворота тоже.
По поводу лопасти над балкой, есть прецессия 90 градусов, от этого и пляшем. Я проверяю цыклик на всем диапазоне вращения ротора.
По поводу лопасти над балкой, есть прецессия 90 градусов, от этого и пляшем. Я проверяю цыклик на всем диапазоне вращения ротора.
синхронно с ротором успеваешь стиком крутить? 😁
Я отлично понимаю о чем говорю, может, не понял, что ты говоришь. Фбл автоматически только скорость вращения дает, ничего она не оптимизирует. PID - параметры переходного процесса, которые характеризуют вид графика как твой цикл изменияется от нуля до Х. Пид параметры скрыты, ты крутишь один из них или их связку. В полете они не меняются. Что такое контуры вращения, это что за термин такой?
Ошибаешься .
Возьми самый задрыпанный К -Бар . Поставь манёвренность 120 , а “оптимизатор” опусти на 20 и поставь галку . Увидишь как ФБЛ сама накрутит скорость переворота которая соответствует цифре 120 .
Вибар, спартан регламентирует положение лопастей относительно балки ( непонятно, почему, ну да ладно ), про микроба - не помню, давно не настраивал. В брайне аналогичных рекомендаций относительно циклика я не нашел.
Игорь, а что тут непонятного, измеряем угол на лопасти перпендикулярной наклону тарелки. Даём циклик вперёд - измеряем на лопасти перпендикуларной балке. Даем вправо - поворачиваем лопасть параллельно балке и измеряем.
Если тебе нужно именно почитать об этом - то вот 6.5. Setup of cyclic pitch
В брейне цыклик настраивается раздельно по элерону и элеватору, скорость переворота тоже.
Да, но не угол (не максимальный угол) а параметры обработки FBL’кой угловых скоростей и команд со стика
Я проверяю цыклик на всем диапазоне вращения ротора
Ээээ? Как? И главное - зачем? 😵
Ошибаешься .
Возьми самый задрыпанный К -Бар . Поставь манёвренность 120 , а “оптимизатор” опусти на 20 и поставь галку . Увидишь как ФБЛ сама накрутит скорость переворота которая соответствует цифре 120 .
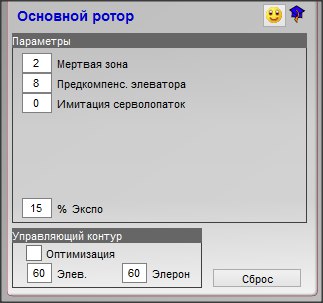
Я не понимаю о чем ты. Я про сайклик ринг, ты мне про оптимизатор. Оптимизатор в управляющем контуре - PID, сайклик ринг - предел цикла.
Может не я ошибаюсь, а мы говорим о разных вещах?
Оптимизатор в меню управляющего контура задает тебе резкость цикла при том условии, что тебе достаточно цикла. Сайклик ринг обеспечивает тебе лимит цикла.
Если не хватает цикла по какой нибудь оси “оптимизатор” выровняет контур , в Брайне это требуется делать вручную - регулируя PID
Пишешь ерунду или не те слова используешь. Тебя можно двояко понять. Если цикла не хватает механически, то никакой оптимизатор не поможет
Единственная фишка вибара, что он может сам подстроить первоначальные значения резкости по циклу. А так в настройках все то же самое что и во всех системах), только называется иначе.
Кстати с питчь пампом могла и голова заклинить так как дергал очень резко (скорость была большая).
Так что надо проверять запас по углам включая питчь памп.
По идее питч памп не должен выходить за установленные лимиты, просто он резче твоих пальце дергает шаг
В скукуме прикол есть. Там есть разные интерфейсы в проге для настройки типа базовый, продвинутый и про. Если он сам по каким-то причинам поставит базовый, то он делает одинаковый цикл по элерону элеватору, так как в базовом их разными нельзя сделать. Я не мог понять, че верт такой тупой стал. По элерону норм, по элеватору унылый при резких движениях.
Мне не понятно почему у вибара именно циклик РИНГ. Вертолет имеет разные моменты инерции по осям. Попробуйте покачать вер за бошку по элерону и элеватору. По элерону цикла надо меньше. В скукуме цикл раздельно ставится на элерон и элеватор
Ответ :
Потому что у VBar это происходит автоматически .
Если не хватает цикла по какой нибудь оси “оптимизатор” выровняет контур
Ты как бабушка , так и хочется тебе помочь перейти через дорогу …😃
Макс, ты о чем пишешь вообще? Ты толком объяснить не можешь. Оптимизатор только резкость настраивает. А я пишу про ЛИМИТ МЕХАНИЧЕСКИЙ
Цитируешь цитату, в которой ничего не понятно и тупой коммент к ней 😕
Единственная фишка вибара, что он может сам подстроить первоначальные значения резкости по циклу
Это как ? Я наверное что-то пропустил ?
А так в настройках все то же самое что и во всех системах), только называется иначе.
Да ну …?
- Optimizer
- Collective Ballance
- Paddle simulation
- I-limit
- I- Discharge
Продемонстрируй аналогичные фичи .
Оптимизатор только резкость настраивает.
А ну ка , давай в этом месте задержимся : оптимизатор настраивает резкость ?😃
Да ну …?
- Optimizer
- Collective Ballance
- Paddle simulation
- I-limit
- I- Discharge
Продемонстрируй аналогичные фичи .
Я не говорю про нео, с ним я не знаком
если ты про этот оптимизатор, то он отвечает за резкость
если ты про этот оптимизатор, то он отвечает за резкость
Каким образом ?
Вот зачем ты постоянно пишешь о том , что тебе не знакомо ?
Каким образом ?
Вот зачем ты постоянно пишешь о том , что тебе не знакомо ?
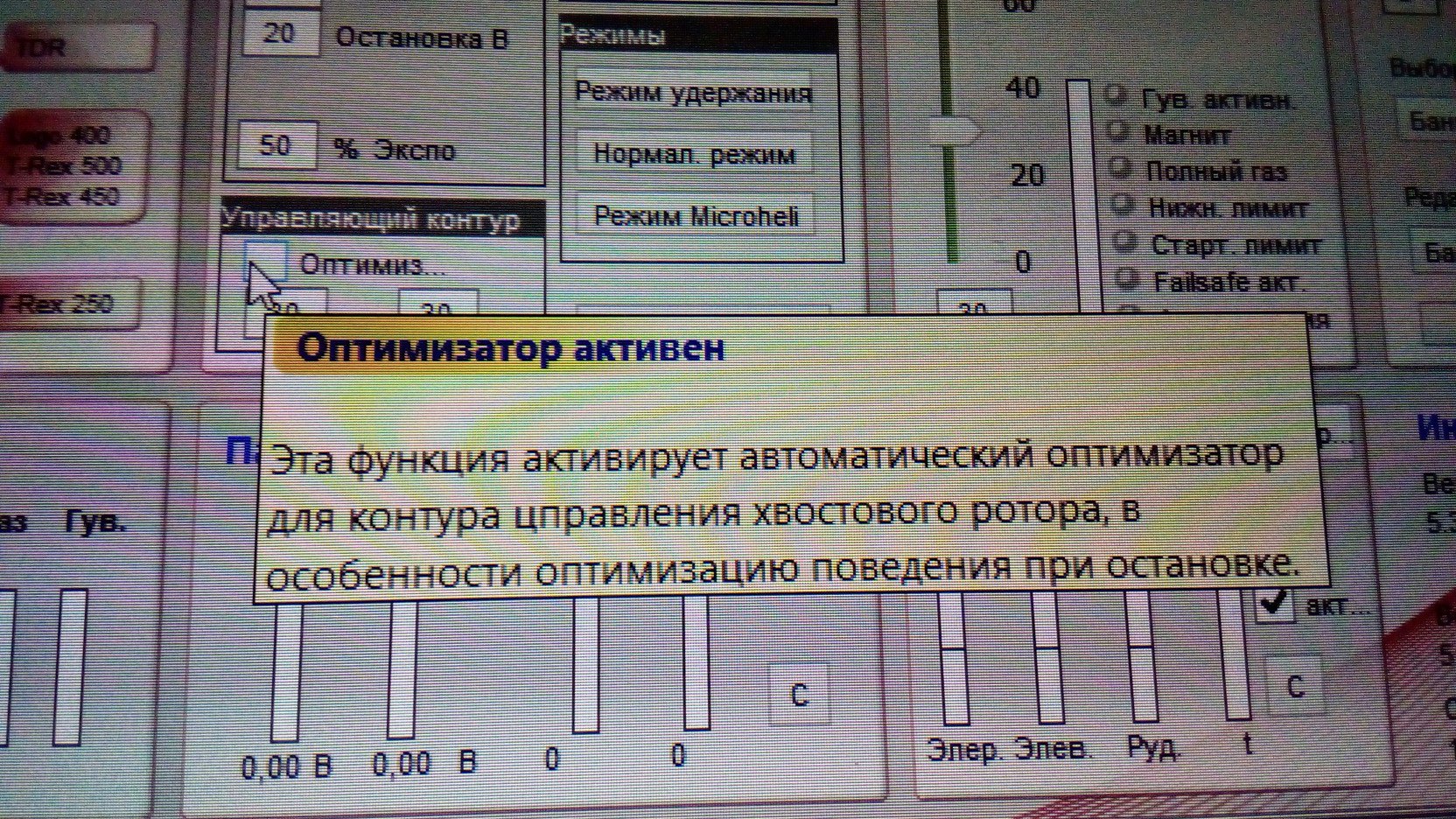
Прямым. Это резкость цикла. Такой же оптимизатор как на хвост, который определяет скорость старта и остановки
Такой же оптимизатор как на хвост, который определяет скорость старта и остановки
За скорость старта в настройках хвоста , отвечает - Acceleration
За остановки - Stop Gain A-B
Это резкость цикла.
За резкость и отклик в В-Бар отвечают три параметра :
По циклику : Paddle simulation , Style
По коллективу : Pitch Pump
Поведение при остановке. Такой ответ устроит? По циклу то же самое. Это резкость. Не механические лимиты, повторяю еще раз
За резкость и отклик в В-Бар отвечают три параметра :
По циклику : Paddle simulation , Style
По коллективу : Pitch Pump
Оптимизирующий контур в придачу
Вот тебе более конкретнее про остановки :

Макс, тема не про вибар, хватит спорить. Ты не сечешь.
Убери сайклик ринг, посмотрю как тебя твой контур спасет