Arduino для BAIT BOAT...

что тут должно быть не знаю
Первое правило: не знаешь, не трожь!!!
Оставьте его в покое, к Вашим хотелкам он не имеет отношения.
Похоже внизу окна Flight Planner…
Вы его вообще открывали?
Кнопки справа от карты.
Внизу таблица точек маршрута.
сначала нужно очистить память от записи имеющихся точек/маршрутов и проверить очистку
Как это сделать? Внизу в списке WP должно быть пусто, если есть точки, убираем их - “удалить” в таблице. Так? А проверить очистку каким образом?
Можно с пульта: в режиме Manual, нажать тумблер/кнопку записи точки.
Можно в этом окне в таблице точек понажимать в столбце Delete х, а потом, когда таблица очистица, нажать кнопку Write WPs
Проверить последующим чтением: Read WPs
Спасибо Эдуард, пока всё понятно. После работы буду пробовать. 6 канал решил оставить под бункер, запись WP буду прикручивать к 4 каналу.
Всем привет. Может кто подскажет - нужно ли в МП выставлять тип батареи и если да, то где. Дело в том, что ни напряжение, ни ток ничего не показывают. Одни нули. У меня Pixhawk и стандартный модуль на 90А. Перепробовал все типы модулей в настройках. Ничего не помогло…
Всем спасибо 😃 Вопрос был до безобразия прост - не было контакта в разъёме. Вероятно за пару лет просто окислился…
Всё заработало. Не знаю, насколько чётко. RC4_Function стояло в 1, поставил в 0. END POINT4 0/100, CH7_OPTION стояло правильно - в 1. Теперь бы ещё испытания на воде - сегодня снег шёл!
Спасибо всем за помощь .
Добрый день коллеги. Подскажите есть ли возможность совместить команду “Сброс прикорма” с командой “Запомнить точку”. Или какие-то варианты.
Подскажите есть ли возможность совместить команду “Сброс прикорма” с командой “Запомнить точку”.
В принципе можно тупо завести сигнал с этого канала приемника через Y-разветвитель еще и на какой-нибудь другой свободный канал АП. И в этом канале установить параметр RCPassThru = 1. Но тогда сброс будет выполняться при каждом нажатии на этот тумблер/кнопку, независимо от режима АП.
Ежели используете модемы и МР, можно сброс выполнять из него. Не используя пульт.
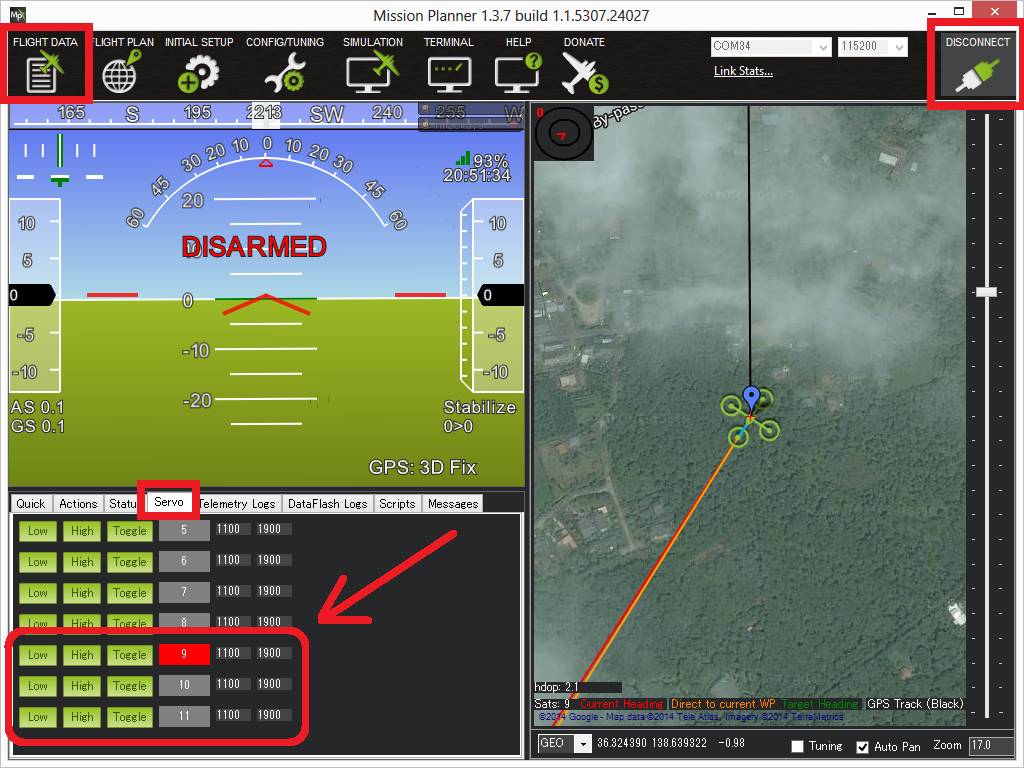
Просто в закладке Servo тыкаете в кнопки управления соответствующим каналом (в примере 9-й). Low/High будут устанавливать серво в крайние положения (которые можно задать в листе параметров), а Toggle будет кратковременно перестанавливать серво из Low в High и возвращать обратно.
Ну и можно просто сделать сброс автоматическим, по приходу в точку. 😃
Ну и можно просто сделать сброс автоматическим, по приходу в точку
Как правильно спланировать и прописать миссию в МП - Дом - путевая точка 1 - автосброс - путевая точка 2 - дом?
Используется модем и планшет. Спасибо.
Как правильно спланировать и прописать миссию в МП - Дом - путевая точка 1 - автосброс - путевая точка 2 - дом?
Не понятно, а зачем “путевая точка 2”? Ведь там кораблик никаких действий не производит. Если сбрасывать дополнительный прикорм или снасть, было бы интересно прописать миссию: дом-путевая точка 1- автосброс 1й лоток-путевая точка 2- автосброс 2й лоток-дом.
И тут попутно возникает еще вопрос: если сбросом с двух лотков управляет 1 серва (среднее положение (1,5 мс) замок закрыт, крайнее положение, например 1 мс, сброс первого лотка, другое крайнее положение 2 мс, сброс второго лотка, как прописать?
Как правильно спланировать и прописать миссию в МП
Поначалу планирование заданий может показаться долгим и нудным.
Чтобы упростить использование этой возможности, нужно привыкнуть планировать управление лодкой командами из МР и привыкнуть упорядочивать всю информацию по маршрутам в своем компьютере(на котором МР). Чтобы потом не приходилось разгребать в файловой системе кучу файликов, в поиске нужного. Самое простое создать папку маршруты, внутри создать папки с названиями водоемов, в каждой - папки с названиями мест ловли на этом водоеме, а уже внутри каждой такой папки хранить маршруты завоза в этом месте.
Как правило для конкретного места Вы уже знаете/спланировали места завоза прикормки/снастей. Можно предварительно сделать “заплыв” по таким точкам и запомнить их в АП. После этого скачайте их в МР и сохраните на диске в компьютере в выделеном месте, используя команду Save WP File. Дальше удобно создать шаблон маршрута для одной такой точки, а потом, используя его, насоздавать маршрутов по остальным точкам и их комбинациям. Все это можно сделать дома в спокойной обстановке.
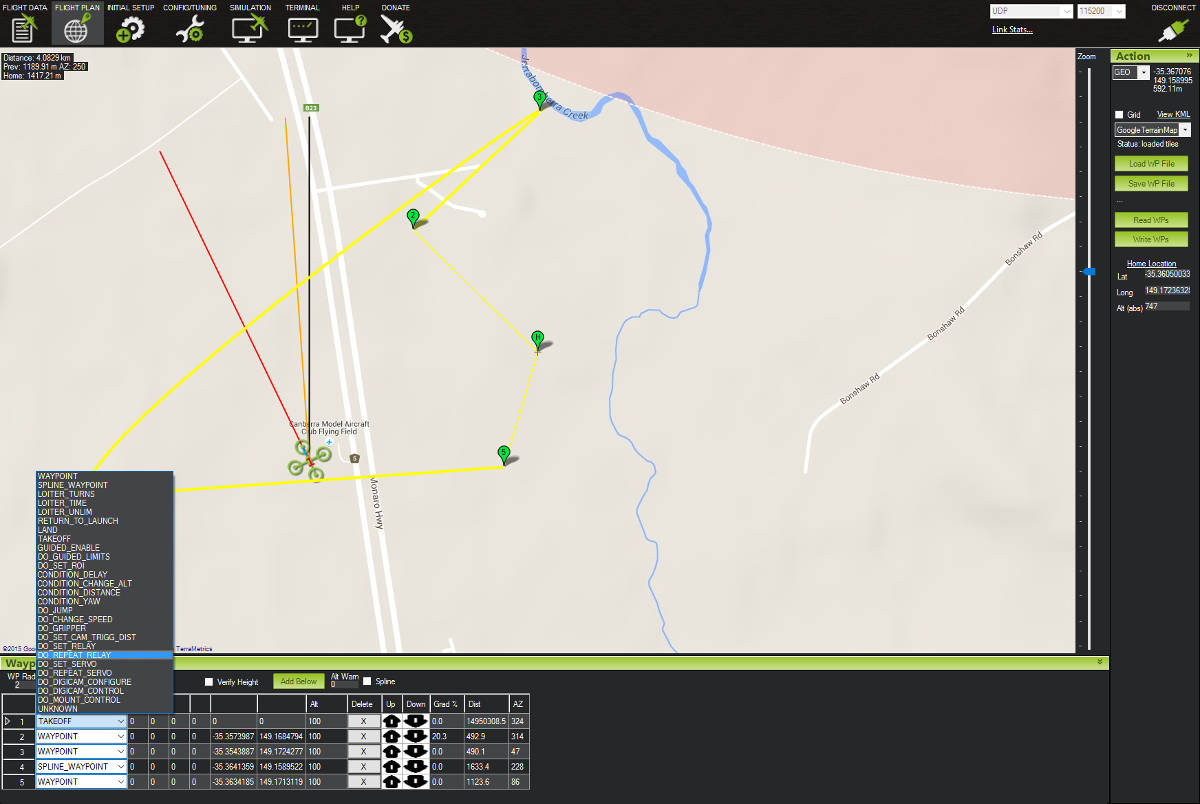
Пример шаблона во вложенной картинке. Сам пример намеренно немного осложнил завозом “за угол”.
Точка прикормки WP-3, она как бы “за углом”(считаем мель мешает напрямую). Точки WP-1, WP-2 - для отхода лодки на гарантированную глубину. После ввода точки прикормки(WP-3) вводим команды:
- задержки(3 сек),
- установки серво в канале 6 в положение 1900мс, 1 раз на 5 сек.(потом она сама вернется в исходное положение)
В принципе после этого можно давать команду на возврат. Но по этой команде лодка будет возвращаться в точку Home(H) напрямую, а у нас там мель. Поэтому вводим дополнительную точку WP-4, чтобы лодка сначала гарантированно отвернула от берега, а уже в этой точке даем команду возврата.
Перечень и описание команд здесь.
Созданный маршрут сначала запомните в МР, как описано выше, а когда он понадобится загрузите с диска командой load WP File и запишите в АР командой Write WPs
Не понятно, а зачем “путевая точка 2”?
Чтобы рядом с домом, например метров 10 от дома (от закидушек и т. д.). Потом вручную к дому - не запутать ничего. Ну это, если так надо будет.
Чтобы рядом с домом, например метров 10 от дома (от закидушек и т. д.).
Вот, правильное направление мыслей. 😃
Я сразу не стал “грузить”, теперь можно добавить.
Возвращение можно сделать не только командой возврат, а просто продолжив маршрут и наставив точек в обратном направлении.
При этом обратная часть будет заведомо спланированной так, как Вам надо в конкретной обстановке.
Ну и можно вынести(перенести) само положение “дома”. Автоматически оно устанавливается там, где произошёл захват достаточного количества спутников, т.е. может быть вообще на берегу. Для кораблика лучше это положение вынести немного от берега, чтобы он возвращался туда.
И тут попутно возникает еще вопрос: если сбросом с двух лотков управляет 1 серва
Если надо устанавливать серву последовательно в несколько положений, можно воспользоваться серией команд Do_Set_Servo, которыми задается положение, и между ними вставить команды задержки(паузы).
Для кораблика лучше это положение вынести немного от берега, чтобы он возвращался туда.
А в случае аварии, например, обрыв связи, кораблик все равно вернется в точку “дом”? Или можно эту точку принудительно сместить в необходимое место?
А в случае аварии, например, обрыв связи, кораблик все равно вернется в точку “дом”?
Да. Проблемы только могут быть в том, что в это время считает АП “домом”.
При нормальной “стандартной” работе, “дом” автоматически определяется координатами точки, в которой произошел захват позиции GPS после включения АП.
Отсюда первая проблема: если включить режим Авто до этого момента, “домом” будет позиция из предыдущего включения. И если это было в другом месте, то при включении возврата АП будет рулить туда. Поэтому важно дождаться захвата позиции GPS и еще лучше убедиться в этом по положению кораблика и “дома” на карте.
Второй момент, если позиция “дома” была введена принудительно(при планировании маршрута), то при захвате реальной позиции МР сформирует сообщение и запросит необходимость смены. Нередко народ автоматом тыкает “Enter”/“Yes” и тем самым подтверждает смену. Т.е. “домом” становится не запланированное место, а там где включились. В любом случае уже после захвата при включении позицию “дома” можно изменить/откорректировать в окне Flight Plan.
Ну и еще позицию “дома” можно изменить командой Do_Set_Home в маршрутном задании. Например вставив её после WP-2. Если эта команда без параметров, то устанавливаются текущие координаты. В данном случае получатся координаты точки WP-2. Но лучше/надежнее вводить команду с конкретными координатами. Просто ткните еще одну точку после WP-2 и смените в ней команду на Do_Set_Home.
Еще один, практический вопрос. В автоматическом режиме угол поворота сервы для сброса прикорма мы устанавливаем с помощью длительности импульса макс и мин. В ручном режиме производится такая же обработка длины импульса, или АПМ тупо транслирует длительность, полученную от приемника? И тогда для корректной работы сервы надо установить длительности для автоматического, такие же, как для ручного режима?
Еще один, практический вопрос…
Диапазон изменения сигнала на выходе каналов АП зависит от их функции RC № _Function, которая устанавливается в листе параметров.
Когда канал транслирует сигнал RC, RC № _Function=1, его диапазон определяется настройками пульта и калибровкой АП.
Когда RC № _Function=0, фактически АП выдает сигнал заданный ему командой DO_SET_SERVO/№серво/PWM, где PWM - длительность канального импульса. Не важно откуда пришла команда, из МР или из маршрутного задания. Т.е. считается, что пользователь уже достаточно подготовлен и понимает необходимость соблюдения соответствия длительности импульса в команде допустимому диапазону для конкретного используемого устройства.
Фактически устанавливаемые в листе параметров границы и нейтрали выходных параметров используются, когда это выход с какой то “стандартной” функцией АП. (Руль направления, Газ и т.д.) Обычно за этими функциями внутри АП стоит ряд программных микшеров, смешивающих разные сигналы, вырабатываемые контурами управления АП по их алгоритмам. В результате таких"смешиваний" выходной сигнал может выйти за границы допустимого диапазона, особенно в процессе наладки, когда контуры управления еще не настроены. Чтобы этого не произошло на выходе устанавливают принудительные границы.
Вообще в МР, в закладке Status, можно посмотреть входные и выходные сигналы по всем каналам.
Low/High будут устанавливать серво в крайние положения (которые можно задать в листе параметров)
Здесь про лист параметров было по запарке.
Когда пользуетесь закладкой Servo, по сути МР генерирует команду DO_SET_SERVO/№серво/PWM, а значения PWM для Low и High устанавливаются прямо в окошках, справа от кнопок
Таким образом, если с приемника идут импульсы для управления сервой в диапазоне примерно 1300 - 1500-1700 мкс, (поворот сервы на ± 30 гр, по другому моя простая аппаратура не может), значит для корректной работы сервы мы должны в команде DO_SET_SERVO/№серво/PWM, установить PWM с такими же значениями, 1300 или 1700?
В результате таких"смешиваний" выходной сигнал может выйти за границы допустимого диапазона, особенно в процессе наладки, когда контуры управления еще не настроены. Чтобы этого не произошло на выходе устанавливают принудительные границы.
А каким образом можно выровнять границы длительностей от приемника и АП, для газа и руля? Как установлены границы АП по умолчанию?
Как установлены границы АП по умолчанию?
Обычно, изначально, в таблицу забиты нижние границы около 1000-1100мкс, верхние около 1900-2000мкс, нейтрали около 1500мкс.
А каким образом можно выровнять границы длительностей от приемника и АП, для газа и руля?
После проведения процедуры калибровки RC в таблицу запишутся фактические границы и нейтрали по тем каналам, которые были активны во время этой процедуры.
Т.е., по хорошему, сначала надо настроить передатчик, чтобы его сигналы соответствовали установленным исполнительным устройствам, а потом провести процедуру калибровки.
В самой таблице корректировать вручную требуется, если хотите изменить эти границы по каким то соображениям, либо когда используете АП без пульта управления.
значит для корректной работы сервы мы должны в команде DO_SET_SERVO/№серво/PWM, установить PWM с такими же значениями
Да, при использовании RC пульта, для дополнительных каналов(типа сброса прикормки/снасти) так проще и надежнее.
Т.е., по хорошему, сначала надо настроить передатчик, чтобы его сигналы соответствовали установленным исполнительным устройствам, а потом провести процедуру калибровки.
Вот и я подумал, что лучше будет, раз у меня аппа не выдает полный диапазон, поставить между приемником и АП четырехканальный расширитель длительности.