Arduino для BAIT BOAT...

как управлять без телеметрии для завоза в точку в авто режиме
Уточните, что Вы называете “без телеметрии”?
Если без этих модулей

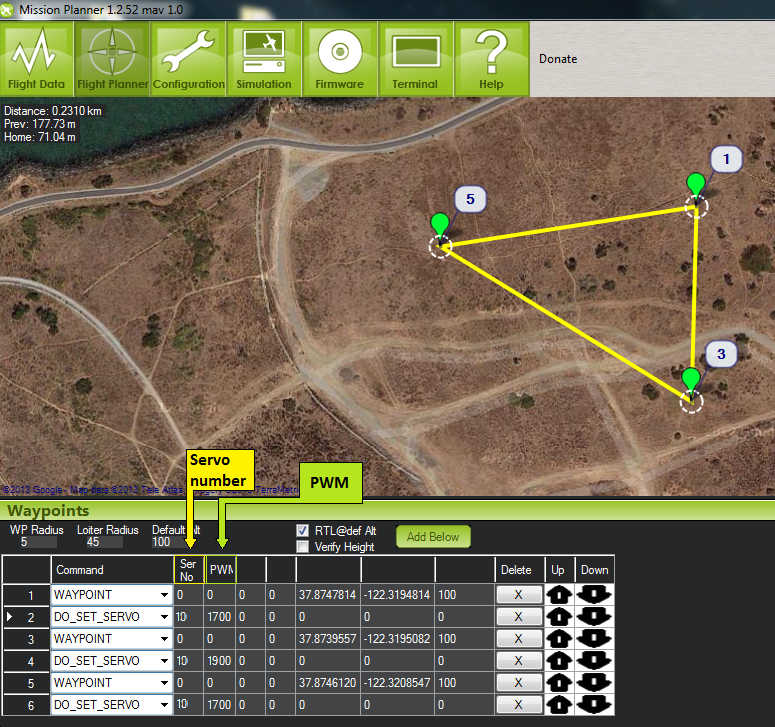
, то сначала подключаетесь шнурком к GCS, вводите координаты точки сброса и после координат точки добавляете строку с командой DO_SET_SERVO с номером канала серво и длительностью импульса, соответствующей открытому положению. В примере ниже управление серво 10-го канала, в ППМ1 - 1700мс, в ППМ3 -1900мс, ППМ5 - опять 1700мс.
Если надо открыть/закрыть удобно использовать DO_REPEAT_SERVO

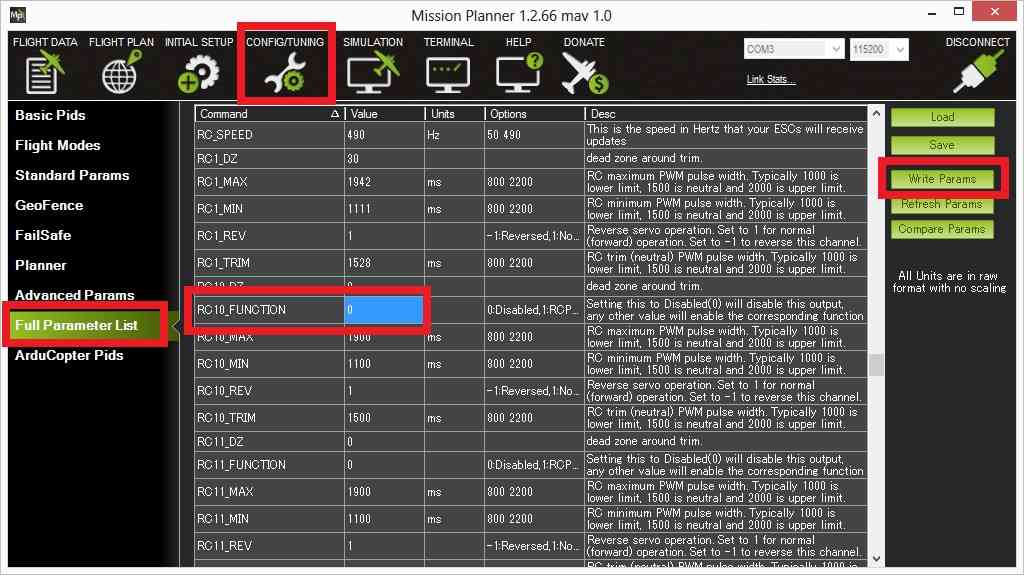
В этом случае указывается открытое положение серво, кол-во срабатываний и длительность паузы. Закрытое положение серво заранее указывается в таблице параметров в строке RCn_TRIM. Так же в таблице параметров надо выделенному серво установить параметр RCn_FUNCTION=0
После ввода маршрута, сохраняете его в АРМ, отстыковываете шнурок, отправляете кораблик в плавание и включаете режим АВТО.
Спасибо, будем пробовать…
Проблема с телеметрией, а именно с модемом на АРМ, решилась… подачей +5V отдельно – на модем. Причина такого поведения мне не понятна…
Поделюсь достижением. Так как с автопилотом пока расслабился, решил запустить на 100% програмулину “Boating Navionics”. Это картплоттер. Ей нужен сигнал ЖПС и сонар. ЖПС взял с АПМ, но перевел на 9600 и через телеметрию 433мГц как радиомодем на берег. На базе с модема в блютуз и на планшет. Там обычная прога BluetoothGPS передает данные навиониксу. Сонар (эхолот) у меня Вексиларовский. Удлиннен также через телеметрию только на 115000 и на 915мГц. Навионикс работает с Вексиларом на прямую. Когда все подключено я на экране вижу свой кораблик на водоеме, а внизу экрана показания эхолота. В режиме записи трека прога создает и сохраняет карту глубины водоема. Проверял пилотный вариант на дальность – гдето 150-180 метров. Без экранов, на проводочках. Переделаю красиво сниму видео.
. Переделаю красиво сниму видео.
Очень, хотелось бы посмотреть… Пока для меня это сложно, - но, к этому я и стремлюсь. Видеть на экране не только глубину в цифрах, но и рельеф дна.
Сонар (эхолот) у меня Вексиларовский
Он же Wifi , покажите внутрености датчика )))
www.raymarine.com/view/?id=11201 хочу такой, также переделать
Он же Wifi , покажите внутрености датчика )))
www.raymarine.com/view/?id=11201 хочу такой, также переделать
Я между платой и вайфаем радио модем втюхал. Сама плата вайфая на берегу, поэтому связь с планшетом всегда 100%.
фото пожалуста
Фото
Кстати есть 2 сумки под такой кораблик. Если надо в ЛС
www.youtube.com/playlist?list=PLr0Qfve4sjkrvZ3zh3s…
Подскажите как правильно подключить и настроить передатчик turnigy 9x для запоминания точек с передатчика и что нужно выставить в Mission Planner. Заранее спасибо!
В общем заказал APM 2.6 и GPS N8M как приедет, буду мудрить, кораблики у меня все одномоторные, руль серва, думаю проблем не должно быть, хотя все может быть, отпишусь что получится как приедет.
Подскажите почему когда на передатчике включаю режим “авто” то в МР показывает режим"HOLD"
Да потому что мисия не загружена в автопилот
Понял Спасибо!
Вот и первая посылка из всего заказа, это телеметрия 915 мгц приехала. Остальное едет. 433 мгц не стал заказывать из за того что эхолот работает на этой частоте а на 1,2 ггц видеокамера.
Проблема такая,серва не реагирует на изменения положения АРМ
??? Уточните вопрос.
Что понимаете под изменением положения АРМ?
Какой вариант ПО загружен в АРМ?
В каком режиме проверяли?
Работает ли АРМ на сервопривод без связки передатчик-приемник?
Да работает. Но либо в автоматическом режиме, либо с управлением через радиомодемы.
Управление сервой в автоматическом режиме описал здесь.
Приехал модуль GPS.
??? Уточните вопрос.
Что понимаете под изменением положения АРМ?
Какой вариант ПО загружен в АРМ?
В каком режиме проверяли?Да работает. Но либо в автоматическом режиме, либо с управлением через радиомодемы.
Управление сервой в автоматическом режиме описал здесь.
Начну с самого начала.
Я делаю авторулевой на катер(большой) на базе этого мозга,радио управление мне не нужно(я как бы сам в модельке сидеть-управлять буду)
Есть у меня ДУ с эл. приводом,вот к нему и хочу прилепить,чтобы не ловить руля.
Изначально хотел использовать гиростат,но он реагирует только на резкие изменения,потому и решил взять АРМ.
Программу МР установил,в АРМ загрузил драйвера.На экране все показывает нормально.Подключаю серву,не реагирует на изменения положений АРМ ни одна ни с МР.Отсюда эти дурацкие вопросы.Вся эта тема для меня -дремучий лес,я больше по жизни с железом-движками занимаюсь.
Все уже практически готово,включая обратную связь с пером руля.Осталось только проводки воткнуть.
Авторулевой нужен для удержания на курсе,планировал,что для изменения курса буду временно отключать мозг,а после постановки вручную на новый курс-включать.Можно конечно и дистанционку заказать,но это опять месяц ждать…Использовать буду только один канал для одной сервы.
Я делаю авторулевой на катер(большой) на базе этого мозга,радио управление мне не нужно(я как бы сам в модельке сидеть-управлять буду)
С этим понятно.
Есть у меня ДУ с эл. приводом,вот к нему и хочу прилепить,чтобы не ловить руля.
Что будете использовать в качестве сервомеханизма, который будет рулить курсом?
Дело в том, что АРМ выдает на выходы сигналы с ШИМ, принятые в модельной аппаратуре как некоторый стандарт(1500мс +/- 500мс, с частотой примерно 50Гц). Если у Вас какой то другой сервомеханизм, он может “не понимать” эти сигналы.
Подключаю серву,не реагирует на изменения положений АРМ
Для такой проверки АРМ должен быть в режиме Stearing(стабилизация курса) и газ д.б. отличным от 0.
В этом случае при изменении курса(повороте АРМ по курсу) от того, который был на момент включения режима, АП будет крутить сервой.
С этим понятно.
Что будете использовать в качестве сервомеханизма, который будет рулить курсом?
Дело в том, что АРМ выдает на выходы сигналы с ШИМ, принятые в модельной аппаратуре как некоторый стандарт(1500мс +/- 500мс, с частотой примерно 50Гц). Если у Вас какой то другой сервомеханизм, он может “не понимать” эти сигналы.Для такой проверки АРМ должен быть в режиме Stearing(стабилизация курса) и газ д.б. отличным от 0.
В этом случае при изменении курса(повороте АРМ по курсу) от того, который был на момент включения режима, АП будет крутить сервой.
Схема такая.Корпус сервы жестко связан с румпелем,на роторе сервы закреплен диск,который управляет конечниками,а дальше через блок реле идет управление силовым эл.двигателем. Это сейчас так. Можно из сервы убрать двигатель(или пару шестерен),чтобы свободно крутилось.А от проводов идущих на этот двигатель через реле(на 5В) организовать управление силовым эл.двигателем.
Попробую сейчас этот режим.Спасибо.
Если получится,этот режим останется в мозге или ноут должен быть постоянно подключен?
этот режим останется в мозге или ноут должен быть постоянно подключен?
Режим работы АП определяется сигналом на входе 8-го канала. Можете его подавать с сервотестера.
Так же можно режим задавать с компа. При отсутствии сигнала на 8-м канале, или при разрыве связи с компом, АП установит тот режим, который был задан в настройках ФС.
Режим работы АП определяется сигналом на входе 8-го канала. Можете его подавать с сервотестера.
Так же можно режим задавать с компа. При отсутствии сигнала на 8-м канале, или при разрыве связи с компом, АП установит тот режим, который был задан в настройках ФС.
Как понимаю,сервотестер будет что то типа руля? Извиняйте,а что такое ФС?
А нельзя сервотестер подключить к 4-му каналу,чтоб не режимом управлять,а направлением.
И еще,это нормально,когда АРМ подключен через ЮСБ на выходе на сервы нет напряжения? Или что то накосячил?
Как понимаю,сервотестер будет что то типа руля?
Сервотестер позволяет имитировать сигнал аппаратуры РУ. Самому АП все равно откуда сигнал берется.
Если подключите к 8-му каналу, АП будет считать это сигналом управления режимами. Откройте в МП закладку Config/Tuning, а в ней выберите Flight Modes, увидите картинку типа первой. Когда будете изменять сервотестером длительность импульса, по режимам будет перемещаться зеленый прямоугольник. Выбираете понравившийся и в нем назначаете необходимый Вам режим(выпадающая менюшка с голубым прямоугольником). После того как назначите необходимые режимы их надо сохранить в АП - Save Modes(на рисунке закрыт выпадающим меню).
Извиняйте,а что такое ФС?
Fail Safe - что делать АП при отсутствии связи.
См. второй рисунок. В Full Parametr List можно настроить параметрами
FS-Enable и FS_GCS_Enable. Второй параметр позволяет включать режим ФС при нарушении связи с компом. Первый что делать в режиме ФС. Для Вас 1-RTL(автоматический возврат домой) не актуален, 2-Hold позволяет остановить(отключить все сигналы на выходе) АП, а 0 - оставить АП в том режиме, в каком он был на момент потери связи.
А нельзя сервотестер подключить к 4-му каналу,чтоб не режимом управлять,а направлением.
Можно, но управление курсом на 1-м канале.
В принципе Вы можете подключить несколько сервотестеров в разные каналы:
1- штурвал/руль;
3- газ;
8- режимы АП.
И еще,это нормально,когда АРМ подключен через ЮСБ на выходе на сервы нет напряжения?
Нормально. Для питания сервы нужно подать напряжение на шину выходных сигналов. На мощную серву, с повышенным напряжением, питание заводить напрямую, минуя АП. К АП подключить только землю и сигнальный контакт.
Спасибо большое за терпение и разъяснения.Я то уже совсем отчаялся что то узнать…
Придет внук,будем разбираться.
Приезжайте ,покатаю-порыбачим.