usb-ppm\pcm выход.

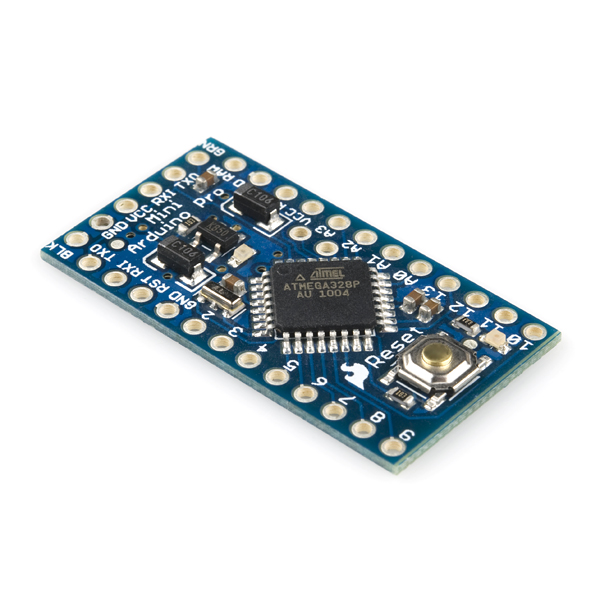
Arduino продается пожалуй что везде… Формально это просто атмега с минимальной обвязкой, да ft232 как мост юсб-уарт.
Единственный плюс ардуины - есть везде и схемотехнически одинаково, т.е. полная совместимость.
Есть еще деление по самому чипу (atmega8, 168, 328), да по частоте кварца (8/16МГц). А, ну и по питанию есть еще разновидности, на 5В и на 3.3В.
Поэтому брать можно где угодно и где удобно, главное чтобы характеристики “совпадали” с “рекомендованными”.
Думайте над ТЗ, как что будет вырисовываться - сообщите.
Ок.И вправду надо определится.
Может сразу сделать универсальный PPM кодер? Что бы можно было реанимировать какие старые погоревшие передатчики?
Логику на Arduino, а ВЧ часть взять на 433 Мгц.
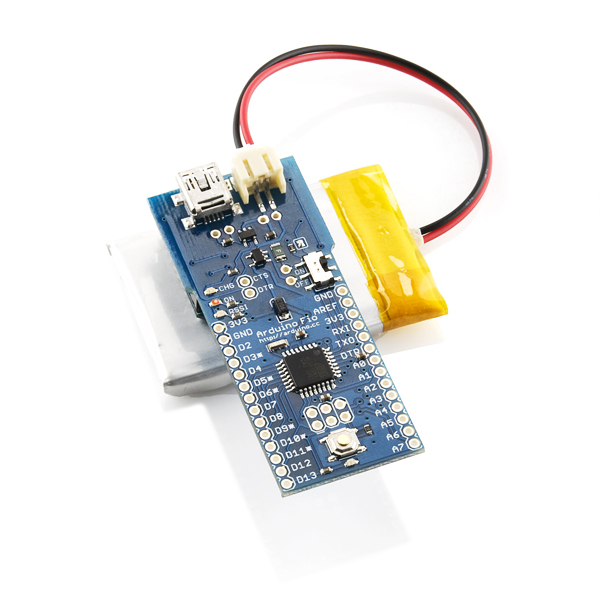
Лучше первая ссылка, есть юсб разъем, чтобы подключит к компу нужен только шнурок, паять не надо. Похожий софт для прошивки и компа есть в исходниках ардупилот-мега.
Может сразу сделать универсальный PPM кодер? Логику на Arduino, а ВЧ часть взять на 433 Мгц.
Тема о самодельном передатчике уже есть на этом форуме, железо там почти полностью идентично ардуине. Только учитывая цену Турниги9… Не стоит оно того. ВЧ часть также не стоит с нуля делать, есть вполне проверенные отказоустойчивые решения. В т.ч. и на 433МГц от fmkit.
И что стоит брать для начала эксперемента?
Уже готовы к экспериментам? 😃
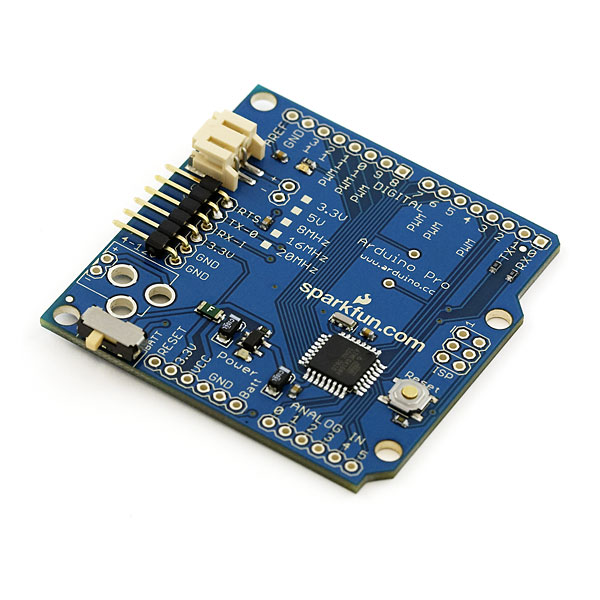
Первое побогаче в плане выходов и удобства работы и прошивки. Второе - меньше физически в разы.
Места придостаточно.Взял первый.
Здравствуйте. Разница в чипах - о объеме памяти. Но для Ваших целей подойдет и 168 (и даже 88-я). Обязательно берите на 5вольт и с FT232RL чипом (он отвечает за трансляцию UART TTL -> USB, т.е. виртуальный COM порт). Вообще я на Вашем месте реализовал бы следующую вещь:
- Arduino nano. Генерирует PPM и передает его на FrSky DF 2.4Ghz Combo Pack for JR w/ Module & RX. Это передатчик с телеметрией - т.е. отдаются некоторые данные по UART протоколу. На ардуине реализуем виртуальный UART1 (т.к. физический UART0 будет занят связью с компьютером). Получаем данные и отправляем их на UART0, и ожидаем когда припрут с компьютера новые, параллельно все так же генерируя PPM и подавая его постоянно на передатчик.
- На компьютере, для облегчения программирования, софт пишем на python c использование библиотеки pygame, так как там есть удобное считывание команд с джойстика, а если еще и у вас будет линукс, а не виндоус - то получение картинки с устройств видеозахвата., и все это сдобрено возможностью наложения на картинку данных телеметрии.
Теоретически возможно воткнуть провод TX с приемника на ножку TX ардуины, тогда она будет передавать информацию напрямую в компьютер. Но, т.к. ножка RX ардуины будет получать информацию с компьютера, чтобы все это заработало, настройки протоколов должны быть одинаковые.
Собственно практически все это я реализовывал несколько лет назад, только без телеметрии, т.к. использовалась Corona Diy, но за неимением на тот момент автомобиля - возить в поле ноутбук (который тоже долго не жил) и джойстик, который тоже куда то нужно ставить - было затруднительно.
Если есть какие-то вопросы - готов помочь. Удачи.
Роман спасибо за сылки.Узнал много нового.На выходных начну изучать.
Видать зима одинаково на людей влияет
сам засел за ваяние подобной системы и подключение компутерного джойстика к PPM передатчику
в принципе на вид все прозрачно
по желанию готов объединить усилия 😉
Вот мое жалезо, мот поможет
kazus.ru/forums/showthread.php?t=19041
Цеплял джойстик к Ардуине, летать вполне приятственно.
Информацию брал от сюда
www.ianjohnston.com/content/index.php?option=com_c…
Александр, я личное сообщение прочел прежде чем сюда заглянул - думал, что ардуины нет, есть только конвертер. А раз есть первое - я за завтра напишу скетч и программу для компьютера, а так же схему соединения ардуины с передатчиком. Кстати какой он у вас?
Роман спасибо за помощь.Даже не знаю,как я могу отблагодарить тебя.Но я что-то придумаю.
Ардуинка у меня,вот зта.-
на ATmega328.
Для ускорения процесса,нашёл почти готовый проект.На ардуине.
TxDuino.
Прога для виндовса.
А вот и сама прошивка.
Уже успел попробовать.Загнал прошивку в ардуино,запустил прогу,указал порт,подключил 2-ой дигитал к осцилографу и на экране появился сигнал РРМ.Правда управлять пока не научился.И сигнал какой-то мусорный.
f4.foto.rambler.ru/preview/r/668x315/…/1.gif
П.С.А что надо перерезат. на плате ,чтоб ресет не делал?
Вот это замечательно что на DIP. Софт на PC я пишу кросплатформенный (PC|Linux|Mac), но видео будет работать только в последних двух. Собственно сам софт, как я уже и говорил у меня очень давно был написан, просто хочется его для public/production вылизать, а именно: у Вас обнаружены две видеокамеры. Выберите ту, куда подключен rc-видеоприемник. На вашем джойстике обнаружены пять осей. Скорее всего четыре из них - элероны, руль направления, элеватор, двигатель. Пятую можно использовать для флапперовов. Будем, ага? Ну и все в этом стиле. А замечательно, что на DIP - потому что есть некоторая мысль по развитию этого проектика, но без ардуино-обвязки. Но это потом.
Коллеги, к сожалению в выходные много времени уделить не удалось, но программная часть для компьютера в работе, сейчас реализовано: захват картинки с камеры (с отображением в окошке), инициализация и захват данных с джойстика и вывод этих данных в терминал (вывод на ком-порт подключается не сложно). Но, так как у компьютера может быть несколько камер (например одна встроенная и одна - тв тюнер), а джойстики могут иметь много осей и кнопок, сейчас занимаюсь интерфейсом конфигурировани (менюшки там всякие). По срокам обещать ничего не буду - очень много работы во основной работе. Но как первые меню сделаю - вложу в сеть видео того, что сделано. Исходники я выложу после того, как закончу меню конфигурирования системы и перейду к меню конфигурирования летательных аппаратов (каналы, расходы, управление камерой и прочие экспоненты).
Понимаю.
С этой веткой выйду в люди,с ардуинкой уже разобрался,теперь плавно ререхожу на линукс.
Линукс для меня тёмный лес.
Роман Если не трудно можешь подстрить под этот джой.
Настроить конкретно под каждый джойстик невозможно, увы, потому что при инициализации джойстик возвращает информацию о:
- количестве осей
- наличии "хэт"а - это пимпочка наверху ручки отклоняемая в 8-мь положений (можно использовать под управление камерой)
- количестве кнопок
Оси не нумерованы, т.е. та ось которая а одном джойстике будет отвечать за элероны (наклон вправо-влево), на другом - окажется ручкой газа… Или вообще второй ручной газа, как, например на Saitek Cyborg FLY 5 (X). По этому я и ввязался в написание меню, которое бы позволяло под любой подоткнутый джойстик настроить на каждую ось - конкретное действие, и под каждую кнопку - тоже конкретное действие. Ах да, для каждой оси нужно настраивать где у нее 0, а где 255. Про ардуину - нужно сделать либо параметр указываемый перед компиляцией, либо вообще указываемый с компьютера (что для конечного пользователя удобней), какой сигнал PPM - подавать - обычный или онвертированный.У каждой камеры тоже есть минимум три настройки.
Автоинверсия реализовывается очень просто… У меня она по сути сама получилась, каждый кадр может идти прямым или инверсным. Если надо, распишу алгоритм, но он вообщем-то очевиден…