EasyToTrack - DIY универсальная наземка, повортка, телеметрия

А я логику не затрону. на мотор элевации не буду подавать управляющие сигналы. Вместо него у меня в дальней зоне будет работать “вертикальная диаграмма направленности панельной антенны” (антенну установлю на фиксированный угол в 45 градусов)
типа такой
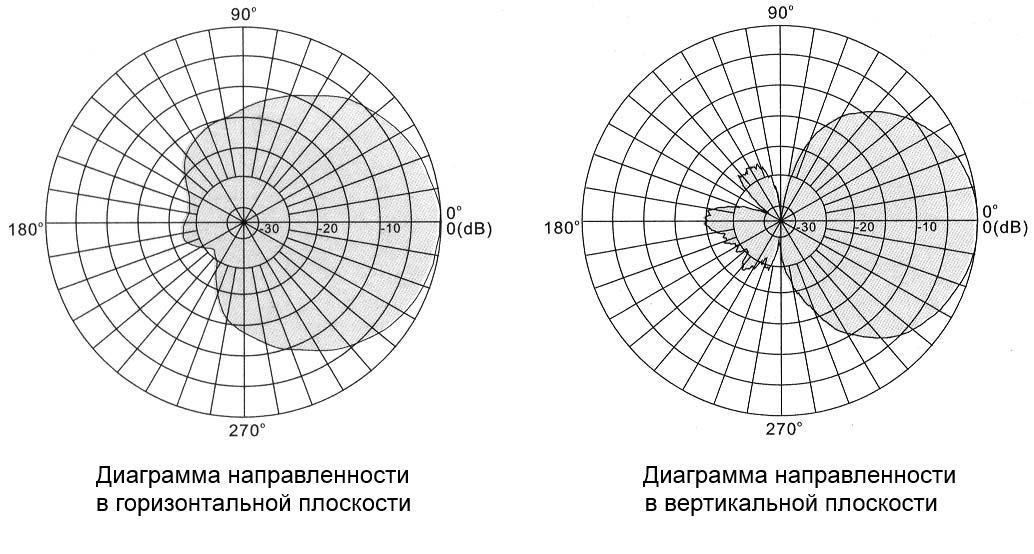
А в ближней зоне уже панельная антенна будет не эффективна по вертикали, но из за того, что я использую диверсити приемник, он переключится на всенаправленную антенну, которая и компенсирует своей диаграммой оптимальный прием. (а панельная антенна пусть крутится)
Без диверсити приемника, конечно, это все бы не работало.
Не верно понимаете работу прошивки наземки. Она думает что у вас антенна поворачивается на 180 град, а реально будет на 360.
Нужно что бы прошивка наземки работала в режиме 360 по горизонту.
Я не знаю добавили это или нет. Константин вроде много изменений делал в прошивке наземки. Может и добавили режим 360 градусов по азимуту.
упустил этот момент… сейчас перечитаю описание работы… Я что-то подумал, что если буду использовать серву (шаговый двигатель с доработкой) на 360 градусов то и крутится он будет на 360
Да будет крутиться на 360, но наземка будет думать что 180.
Посмотрел в приложении для Андройд (версия 2.2) есть там возможность настроить вращение на 360 градусов по азимуту. Так что буду заказывать печатные платы у китацйев и попробую повторить проект с использованием шаговых двигателей
Тогда хорошо.
Доброго дня! у кого нибудь есть гербер-файл для EasyToTrack Sender?
большая просьба прислать на почту uvars#mail.ru. Спасибо
Доброго дня! у кого нибудь есть гербер-файл для EasyToTrack Sender?
большая просьба прислать на почту uvars#mail.ru. Спасибо
drive.google.com/…/0B4njKGFSQZO1NjdDU2dEQVJQVUU?us…
Но там неразбериха: герберы одной версии, монтажная схема с описанием - другой. Кароче я до сих пор не смог заставить сендер видеть данные с полетника, все перепробовал что могу, не видит и все. Знал бы что так будет не стал бы столько средств и времени тратить на данный проект. Не стоит он того.
Доброго дня! у кого нибудь есть гербер-файл для EasyToTrack Sender?
большая просьба прислать на почту uvars#mail.ru. Спасибо
Вот прямая ссылка на герберы для EasyToTrack Sender V2
drive.google.com/open?id=1oKXF1oW5ppsnj5Xm-mAY4k_n…
На гуглдрайве почистил. Старое удалил, релевантные файлы добавил.
Но там неразбериха: герберы одной версии, монтажная схема с описанием - другой. Кароче я до сих пор не смог заставить сендер видеть данные с полетника, все перепробовал что могу, не видит и все. Знал бы что так будет не стал бы столько средств и времени тратить на данный проект. Не стоит он того.
Можно взглянуть на объем и разносторонность выложенного проекта и сделать скидку на присутсвие неточностей. При том что денег никто не просит. Занят в проекте один человек. Кто кодит, тот и доки пишет, тестирует - утопия. Помогать некому (за редким исключением), всем только готовое и 100% рабочее от одного пука подавай. Вместо высказывания своего фи, больше конструктива. Стукнуть в личку или на почту, написать что не получается найти гербер, кому от этого хуже будет?
По теме. Какая версия INAV?, Какой полетный контроллер, куда подключен UART сендера, можно ссылку на дамп настроек INAV.
Помогать некому (за редким исключением), всем только готовое и 100% рабочее от одного пука подавай.
Может на опенсорсную модель перейти?
Вместо высказывания своего фи, больше конструктива
Да, извиняюсь чято сорвался. Понимаю что одному тянуть проект трудно. Просто очень интересный случай именно с сендером, с полетником он никак не хочет общаться по MSP протоколу. Еще ради интереса я подключал напрямую GPS приемник (на нем были выставлены NMEA+Ublox протоколы, протоколы и скорость всегда выставлял одинаковые), тоже ничего не получалось. Вообще может я не правильно работоспособность проверяю? У меня например на осд полетника уже 4 спутника, а “display status” сендера показывает “0”. Может не так надо проверять? Я чувствую что мой косяк где-то, но найти не могу, не спец в этом.
Вот дамп настроек, но я там уже порты поотключал. Полетник Matek F405-CTR, INAV 2.2. Подключал ко всем свободным портам, и UART1 и UART3 например пробовал. На UART1 висит блютуз модуль и работает нормально, так что с портами все ок.
И еще вопрос: разница по схемотехнике между разными версиями сендера ведь нет? Только трассировка платы различается?
Просто очень интересный случай именно с сендером, с полетником он никак не хочет общаться по MSP протоколу.
Опишу пошагово порядок действий, который выполнил 10 минут назад. Результат положительный.
Подготовка
- Имеем собранный и работающий передатчик телеметрии. Это может быть ОСД или сендер. Камера подключена к сендеру и запитана
- Имеем собранную и рабочую наземку.
“Рабочий” в данном случае имеется ввиду, что в связке эти устройства будучи соединены (на прямую проводом видеовыход сендера к видеовходу наземки) или через радиоканал функционируют: сендер передает, наземка принимает, количество ошибок телеметрии стремится к 0. - Имеем FTDI или аналог кабель.
- Прошитый полетник. Я наковырял у себя Matek 405-WING. Зашил INAV 2.2. В моем случае target = MATEKF405SE
Действия на стороне полетника
- Подключаем кабелем полетник к компьютеру.
- Запускаем конфигуратор и идем в настройку портов
- Выставляем на свободном порту опцию MSP и скорость. В моем случае, выбран порт 6 и скорость 38400


- Сохраняем, закрываем конфигуратор.
Действия на стороне сендера/ОСД
- Соединяем кабель FTDI с сендером.
- Зажимем кнопку на сендере.
- Подключаем FTDI к USB компьютера, смотрим, что зеленый LED мигает медленно -> значит в режиме конфигуратора
- Запускаем EasyToFlyMonitor.exe. Открываем порт, на вкладке Sender/OSD config нажимем Read Config.
- Выставляем настройки по вкусу. Но две выделенные обязательно как на скрине


- Нажимаем кнопку Write Config.
Соединение сендера с полетником сделал как на картинке


- Сендер получает питание от полетника.
- TX->RX, RX->TX
- Так как в опытах участвовал сендер версии 2, то он включается параллельно с видеосигналом. Если используется ОСД или сендер первой версии (с подстроечником), то его нужно включать в разрыв видеосигнала. Прошивка сендеров V1 и V2 не отличется. Подключил, раз пошла такая пьянка и ОСД для попробовать - работает, куда оно денется.
Все.
Подаем питание в любой последовательности на все устройства. Видим что телеметрия доходит по uart от полетника до сендера по вращающейся палке внутри белого кружка по середине экрана вверху. Как только появилось достаточное количество спутников, палка будет вращаться без кружка.
Запустив приложение и подключившись к наземке, видим обновление телеметрии.
Может на опенсорсную модель перейти?
Приложение для андроида с первых минут создания в опенсорсе. Никакого особого эффекта не заметил.
По поводу исходиков видеомодема, хз имею ли я моральное право их выкладывать. Ведь основа там не моя, а msv. Согласен, что изменний куча, короче надо подумать.
И еще вопрос: разница по схемотехнике между разными версиями сендера ведь нет? Только трассировка платы различается?
Есть разница. V2 сильно упрощена и уменьшена, что повлияло и на упрощение в настройке, так как отсутвует подстроечник - остается крутить только в одном месте - в наземке.
Еще ради интереса я подключал напрямую GPS приемник (на нем были выставлены NMEA+Ublox протоколы, протоколы и скорость всегда выставлял одинаковые), тоже ничего не получалось.
О, тут я могу ответить со 100% уверенностью почему не получалось. В EasyToTrack я не добавил функцию автоматической настройки GPS приемника, которую добавил в автопилот EasyToFly, поэтому…
Во-первых, нужно настроить GPS приемник на выдачу только одного протокола. Или NMEA или Ublox.
Во-вторых, нужно настоить какие сообщения GPS приемник должен слать:
- Для протокола NMEA это сообщения GGA, GSA и RMS. Все остальные сообщения должны быть отключены.
- Для протокола Ublox: UBX-NAV-POSLLH, UBX-NAV-DOP, UBX-NAV-VELNED, UBX-NAV-SOL, UBX-NAV-STATUS
A никто не сталкивался с помехами на видео от серв? Как фильтровать?
Я сталкивался. Поставил отдельный ДСДС, пустил питание на сервы мимо платы - помогло. Помех не видно, толко слышно немного.
A никто не сталкивался с помехами на видео от серв? Как фильтровать?
+, DС-DС конвертеры, особенно те маленькие что предусмотрены на плате сильно гадят.
+, DС-DС конвертеры, особенно те маленькие что предусмотрены на плате сильно гадят.
Подскажите, а если использовать связку импульсный DC-DC и линейный - помехи будут? Хочу в своей наземке на вход поставить импульсный DС-DС,он будет понижать входное напряжение до 9 вольт, а далее его уже подам на линейный стабилизатор с которого будет выход 5 вольт.
Оно конечно можно и сразу входное напряжение подать на линейный стабилизатор, но он греться будет сильно.
Подключил, раз пошла такая пьянка и ОСД для попробовать - работает, куда оно денется.
А можно, я тебе три своих, не работающих пришлю? Посмотришь на них или к Стене отнесешь, чтоб заработали. Все работает но данные на трекекр не приходят.
Посмотришь на них или к Стене отнесешь, чтоб заработали. Все работает но данные на трекекр не приходят.
😃 к Стене нести это на самый крайний случай
То есть картинка ОСД есть, а ошибок на приеме 64 показывает или как-то по-другому не работает?
Оно конечно можно и сразу входное напряжение подать на линейный стабилизатор, но он греться будет сильно.
Я на своих двух наземках так и сделал. Один DC-DC на сервы, а аналговая часть от линейного стабилизатора. Место под него на плате предусмотрено. Притаю все от 3S. Да греется сильно, но в моей жаре ни одного отказа не было.
То есть картинка ОСД есть, а ошибок на приеме 64 показывает или как-то по-другому не работает?
Именно так!
И ни в какую
То есть картинка ОСД есть, а ошибок на приеме 64 показывает или как-то по-другому не работает?
Да, именно так. Сегодня поставил на тот-же сет сендер - заработало с ходу. Т.е снял осд, воткнул на его место сендер - наземка сразу отреагировала, все работает как должно быть. С горя запустил MWOSD, в комбинации с сендером - тоже все работает. Так что самолет то я разморозил, но хочется таки MSV OSD.