flybrain. передатчик + приемник + автопилот. powered by stm32

С датчиками ВС и Тока надо бы реальные датчики пробовать. Им помимо напряжения на АЦП еще функцию K*X+B надо подбирать. Авторасчета этого дела в КП пока не имплиментировано, поэтому пока через эксельный файл. Рисуешь там график по точкам и методом “тыка + проверка в полете” подбирается крутизна К и смещение нуля B.
Демо ролик как работет симулятор FlightGear, OSD Menu. Слетал в симуляторе тестовую миссию, возврат по выключению передатчика и аварийная автопосадка.
Прошивки в доступе со всеми этими фичами будут завтра-послезавтра. Пока отлавливаю остаточные мелкие баги.
Также исправил детектор кадрового синхроимпульса. Теперь картинка ОСД стабильна, и не дрыгается.
Алекс, а что нужно для работы с флайтгиром?
Скачать последний FlightGear, новую прошивку, новую КП и USB кабель. Затем передатчик, приемник, СТДАПП. Все это вместе дает полную симуляцию почти по всем режимам. Прошивка и КП будет завтра-послезавтра, так как пока остаются мелкие несущественные глюки.
Наклон авиагоризонта на HUD и крены модели на экране правильно соответствуют?
Прошивка mozgolet-navigator.narod.ru/index/0-30
Новая КП mozgolet-navigator.narod.ru/index/0-33
Пояснения по запуску FG симулятора на странице с прошивкой.
Наклон авиагоризонта на HUD и крены модели на экране правильно соответствуют?
Да, все ОК. Работает правильно. Наклон отрабатывается относительно камеры, то есть в противоположную сторону. Так и должно быть.
Картинка больше не дрыгается 😃 И такое ощущение, что маркер самолета - цветной, переливается желто-синим. Только он, остальное все белое.
Менюшка понравилась. Конечно, куча параметров там лишних и просто опасных. Но собственно, за что боролись 😃
Кое-где вылезают русские слова, при английском интерфейсе. И мне кажется можно было бы передвигаться по менюшке в полстика. А то сейчас надо стиком прям ткнуть в упор, чтоб сработало.
Флайтгир, это, конечно, за гранью добра и зла. На моем ноуте с i5 идет как слайд-шоу. Рулями шевелит как положено, но взлететь с такими лагами я даже не пытался.
На выходных попробую на компе помощнее.
Кстати, пока ковырялся с FG, АП один раз завис. Пропала картинка на экране и перестали идти сообщения в окошке КП.
что маркер самолета - цветной, переливается желто-синим
Ну, тут уж как есть. Схема видео смеситетеля сейчас не позволит избавиться от переливов. Для этого надо оригинальный сигнал на время пиксела отключать, чтобы световая несущая не пролезала. От цветовых детекторов это тоже зависит. Некоторые не схватывают цвет на пексиле, некоторые хватают. Я знаю как это исправить, но программно это не получится.
Конечно, куча параметров там лишних и просто опасных.
ну убрать всегда можно что-то, а что-то добавить. По ходу дела доработаем.
И мне кажется можно было бы передвигаться по менюшке в полстика
ок, уменьшу диапазон. Это не проблема. Кстати можно отклонить и прижать стик. Там авторепит работает.
На моем ноуте с i5 идет как слайд-шоу
у меня на ноуте i7 + GeForce идет без лагов.
Кстати, пока ковырялся с FG, АП один раз завис.
В режиме FG идет предельно плотный трафик по USB. Иногда медленный хост начинает бомбардировать АП прерываниями так, что он из них выбраться не может. Происходит потому, что хост насобирал данных, а отправку отложил, а потом всю пачку пытается затолкать в АП. Сейчас в режиме FG приоритет прерывания по USB повышается до максимума, соотвественно детектор синхры уже вырубается, если USB даже вздохнуть АП не дает, ну и далее по цепочке. Здесь только смириться с этим. Попробую еще приоритетами прерываний поиграться. Ну в принципе FG это чисто игрушка, на реальный полет это никак не повлияет. У меня подвисоны в режиме FG иногда случаются, но это 1 раз на 10 запусков. Здесь только рестарт эмулятора пока помогает отвиснуть. Если уж совсем будет доставать, то попробую с текстовых данных на бинарные перейти. Там плотность потока данных уменьшится как минимум в 2 раза. Это должно освободить канал USB.
перестали идти сообщения в окошке КП
Монитор COM порта закрывай, когда FG сообщения пересылает. Оно лишнее и только ноутбук напрягает и переглючит. Компонент TMemo начинает тормозить на длинных логах. Я хоть и обрезаю до 1000 штук, но обрезка сама по себе напрягает винду. Она начинает память ворошить и прочее.
Облетал Цесну. 😃
Летал по телевизору через камеру на ноут, забавно, ощущения бликие к натуральным. 😃
Еще бы самолетики туда модельные…
Из замеченных непоняток:
Долго разбирался с реверсами рулей. Т.к. реальных серв пока нет, ориентировался на менюшку.
При правильном перемещении по меню, рули в ручном режиме поворачиваются не в ту сторону (элероны и РВ), а в стабе все правильно.
Так я и не въехал в логику. Помог только реверс в аппе.
У АП проблемы с определением посадки. Статус самолета начинает быстро-быстро меняться между “на земле” и “в воздухе”.
Еще одна беда, возможно вытекающая из предыдущей - после RTH, автопосадки и повторного взлета, возврат на базу больше не работает. Летит прямо, медленно снижаясь, и не предпринимая никаких действий по крену и тангажу.
Алекс, покажи, плз, свои настройки для цесны? Я чего-то настроил и, вроде, АП больше не сваливает аппарат, но летает очень дергано: резко, на грани срыва набирает целевую высоту, бросает рули, просаживаясь метров на 20 и все повторяется.
Еще бы самолетики туда модельные…
В этом как раз и есть самая главная проблема симулятора, я никак не могу найти, как сделать так чтобы энерговооруженность близко к единице поднять
Помог только реверс в аппе.
Так и задумывалось
Этап номер раз:
Используя только реверсы аппы, настраиваешь РУЧНОЙ режим
Этап два:
подогнать реверсы входа на стабе, чтобы по менюшке навигация правильно работала.
Этап 3
Подогнать выходные реверсы стаба, чтобы при задании тестовых поворот через меню рули отклонялись в нужную сторону.
Для реальной модели нужно еще в наклонах проверить.
Статус самолета начинает быстро-быстро меняться между “на земле” и “в воздухе”.
В ручной режим переключи в этот момент.
Вообще связано с тем что оно понятие НА ЗЕМЛЕ - это дело вероятностное. Зависит от скорости, высоты, вариометра, и еще периода изменений этих параметров. Можно конечно пошаманить, чтобы не дергалось, но боюсь чтобы хуже не стало. Или ложных срабатываний при нулевой скорости близко к земле.
Летит прямо, медленно снижаясь, и не предпринимая никаких действий по крену и тангажу.
Так и должно быть. Надо питание передернуть. Оно считает, что полет закончен и нефиг двиг крутить и бить по пальцам. В принципе ты должен делать ДИЗАРМ, а потом АРМ, после этого оно воспримет новый полет, как новый с новыми координатами дома. А сейчас идеология именно такая - приземлился, значит всё. Двиг больше не крутится в в автоматических режимах во избежание травм.
Алекс, покажи, плз, свои настройки для цесны?
Не может реальный самолет набирать высоту с тангажом 20-40 градусов. В принципе есть настройка предельного угла набора высоты, но в текущем алгоритме - это как бы подсказка, а не безусловная граница, так как можно иметь тангаж +20 градусов и при этом падать. А эта виртуальная цесна еще к тому же с задней центровкой до кучи. Здесь мы упираемся в то, что скайвокер свечой в небо валит уже при тангаже +15 градусов, и вариометр быстро отрабатывает и двигатель резко скорость набирает, поэтому текущий алгоритм не чувствует опасности и НЕ пытается на рули давить дальше необходимого. А здесь тухляк полный - газ в пол, руль на 15% вверх, а вариометр показывает либо по нулям, либо снижение. Вот оно и пытается додавливать рули. По этому принципу до кучи срабатывает еще автозащита от глюков показаний горизонта при выходе из пикирования. Сделай круизный газ на 90% и минимальный порог по скорости на 120км/ч и оно не будет падать. Но есть ли смысл менять алгоритмы заточенные под поведение пенопласта, только для того, чтобы симулятор с математической моделью тяжелого и тухлого самолета работал в виртуале? попробуй для начала выставить круизный газ на 90% и детектор скорости сваливания на 120км/ч. Если всё же будет срываться в наборе высоты, тогда давай попробую чисто для симулятора порог работы элеватором жестко привязать к углу максимального набора высоты, а не как сейчас - вероятностно.
Вообще режим набора высоты и выход в планирование - это два самых сложных режима для АП. Ибо с одной стороны надо не уронить, а с другой красиво и плавно рулить. А здесь мы ограничены несовершенством тех приборов, которыми пользуемся, и которые далеки от совершенства реальной авионики, да и эволюции пенопласта в воздухе весьма быстры и разнообразны. Как раз этой темой и занимались с Димой все лето. Сейчас как бы достигнут некоторый уровень надежности. Но надо еще дальше исследования проводить и практику нарабатывать. Буду этим продолжать заниматься. По возможности хочется добиться наличия минимума настроек и как-то автоматически под модель уметь подстраиваться.
P.S. Нашел вроде еще одну проблему в USB обработчике. В следующей прошивке будет фикс. Вроде больше не должно будет подвисать.
Привет Алексей,
Хочу купить себе SkyHunter и поставить туда твой автопилот. Но проблема в том, что на этом носителе нет руля направления. Вопрос - сможет ли мозголет управлять самолетом без руля направления?
Присоединяюсь. Как бы теоретически представляю, что можно сочинить миксы с РН на элероны. Но как реально это будет работать - пробовать и проверять надо. Но может быть, что канал РН будет в “пустоту” работать, не?
АП в полете использует все три рулевые поверхности. Рудером работает работает только в автоматическом режиме в двух случаях:
- в виражном крене, когда не хватает элеронов. Срабатывает рудер не то чтобы рандомно, но алгоритм решает сам применять его или нет, если давление на элероны не приводит к нарастанию угловой скорости. Если элеронов достаточно, то рудер не подключается к процессу
- Если навигация перешла в режим удержания. Латинская буква “S” в индикаторе режимов на ОСД (правый верхний угол). Там руддер первичен до нарастания определенной ошибки по курсу, а элероны с запазданием подключаются.
Соответственно если руддера нет в принципе, то разумно замикшировать небольшую добавку руддера к элеронам. Миксеры есть, они работают. Персонально я не пробовал летать без руддера. Дима вроде летает с микшером, но могу ошибаться.
Если руддер вообще не использовать, то летать будет, но курс держать будет плохо, а домой все равно прилетит.
Ну вот мой скай наконец-то нормально полетел, и я собираюсь приступить к фаршировке его мозголетом 😃
Задумался о питании.
У меня будет две ходовые батареи 3S в параллель и еще одна поменьше на резервное питание всего, кроме мотора.
Может есть какие-то особенности? Стандартная схема с двумя диодами подойдет?
нет никаких особенностей, можно через два диода.
Основное питание подаешь на питание СТДАПП - это пробрасывается в основной индикатор батареи на ОСД автоматом.
Вторую батарею заводишь на БАТ2 контакт. Там резистивный делитель. На память вроде до 20 вольт терпит, точнее смотри что ты там впаял в делитель. БАТ2 отображается на ОСД как вторая батарея.
Основное питание подаешь на питание СТДАПП - это пробрасывается в основной индикатор батареи на ОСД автоматом.
А побаночное напряжение где-то используется?
Я пытался вывести на экран, но потом забил болт на это дело. Слишком много места занимает на экране, а толку - ноль. Если прям ну очень хочется, то могу реанимировать. Ну и опять же, это будет только для 3S батарей.
Я пытался вывести на экран, но потом забил болт на это дело. Слишком много места занимает на экране, а толку - ноль. Если прям ну очень хочется, то могу реанимировать. Ну и опять же, это будет только для 3S батарей.
Если только для целей отображения, то конечно оно не нужно. А других целей я придумать не могу. 😃
В общем, спасибо, пока все понятно, буду дерзать.
А как быть со звуком? Просто подключить к микрофону или нужно согласование мутить?
звук с АП можно просто засунуть на вход аудио передатчика. Если хочется еще и микрофон, тогда надо колхозить простейший смеситель на резисторах. Опять же надо понимать, что за источник звука от микрофона. Он уже после предварительного усиления или еще до того, какое там сопротивление источника.
На АП есть последовательный резистор, разделительный конденсатор и операционник. Можно что-то снять и поставить перемычку, поиграться сопротивлением, и т.д. Короче, варианты поиска приемлемого варианта смешения двух сигналов есть. Для начала достаточно просто ткнуть аудио выход АП на звуковой вход видеопередатчика и посмотреть что получится.
Всем привет!
Нарисовал схему борта. Прежде чем начать воплощать в железе, хотелось бы получить одобрение гуру 😃
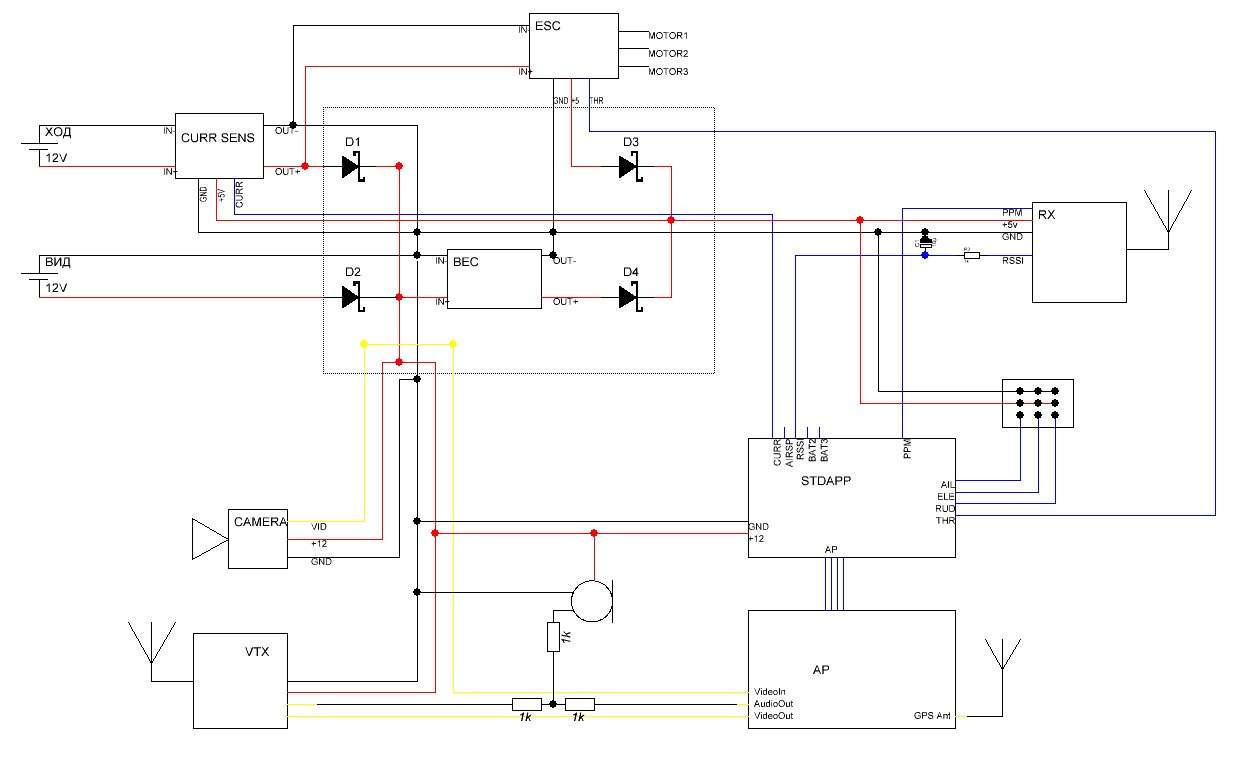
(по клику будет большая картинка)