PitLab FPV System: OSD+Autopilot+Ground station

Всем привет.
присоединяюсь к сообществу Питлаберов)
недавно купил себе этот АП, без наземки. при помощи инструкций Сергея собрал все это добро в своего потрепанного скайсерфера(x-uav skysurfer x8 , который был вообще моим первым самолетом и на котором я учился летать(повидал он страшные вещи в своей жизни). летал только в режиме стабилизации, без камеры на борту. разок попробовал воткнуть режим auto в надежде вернуться домой, на что самолет ответил стремительным рывком почти вертикально вниз, повезло, что вовремя дернул переключатель обратно в стаб. высота была метров 20-30. понял, что не стоит так эксперементировать, не доведя все настройки до нужного уровня.
скажу сразу, я ПРОЧЕЛ всю ветку) было сложно читать все эти терки и споры) но я прочел) я так же имею pixhawk, правда он у меня на квадрике стоит, там я им очень доволен. ни разу не подводил. но я не являюсь рекордсменом, в дальности и высотах полетов, летаю в основном низко и близко. но мечтаю летать на двух и трехзначные числа в км)
теперь о моей конфигаруции и что я собираю.
скай1600 (брал бушным, состояние нормальное)
turnigy 9xr pro
lrs hawkeye fpv-community.ru/…/314-hawkeye-dtf-uhf-deluxe-pere… извиняюсь если нельзя вставлять ссылки но так вроде понятней. приемник вот такой fpv-community.ru/…/315-hawkeye-dtf-uhf-minirx-prie…
камера, моторы и сервы с регулями я думаю указывать смысла нет, это все понятно.
первый мой затык SBUS. я на скайсервефере использовал pwm, и там был другой модуль с приемником (frsky djt и v8 fr2) там все понятно и все работало. хотя засунуть все эти провода в скайсерфера было не просто). я не настраивал никогда SBUS.
собственно что я делаю: с помощью расширения хром я настраиваю свой вч модуль следующим образом
TX
RX
В FPV_manager переключаю сигнал на SBUS
Подключаю провода 1 разъем на АП (тот который со стороны юсб входа) в 8 порт на приемнике (так как в настройках RX именно на этом порту настроен SBUS)
в соответствии с инструкцией подключаею провод от ESC в АП. больше пока ничего не подключаю.
соединяю комп с АП по юсб и хочу проверить как все работает но ничего не работает. не реагирует на движение стиков.
подскажите что и где еще я забыл или не настроил?
заранее хочу сказать, я начинающий в этой области) если кого-то нервирует разжовывания для чайников не пишите) поберегите себе нервы.
я искал инструкции как это сделать, но нашел только старые переписки Сергея на рсгрупс, там на скриншотах старые версии плат, у меня нету портов таких.
Вовсе не обязательно использовать именно S.bus, Питлаб умеет работать и с CPPM и с обычным PWM со множеством проводов…
Если ты подключил S.bus с выхода приёмника на “первый” штырёк Питлаба, подал питание и на приёмник и на Питлаб, включил передатчик, крутишь стики и в FPV_manager не видишь реакции, это говорит о том, что Питлаб не видит сигнала или его там нет… Формально ещё не было случаев, чтобы Питлаб не видел сигнал… По этому нужно как то убедиться что сигнал уходит с твоего приёмника…
Как настраивать твоего Хавка я не знаю, да и тема тут не про это…
разок попробовал воткнуть режим auto в надежде вернуться домой, на что самолет ответил стремительным рывком почти вертикально вниз, повезло, что вовремя дернул переключатель обратно в стаб. высота была метров 20-30. понял, что не стоит так эксперементировать, не доведя все настройки до нужного уровня.
правильно понял, нельзя этого делать не настроив всё по уму а так же проводить эксперименты на такой высоте - глупо…
возможно у тебя стоит руль высоты в реверсе вот он и “рванул…”
чтобы настроить Пита, нужно читать мой дневник а не ветку…
Pitlab, установка и подготовка к первому полёту. Питлаб
PitLab, режимы, управление меню OSD, Питлаб
PitLab FAQ, Часто задаваемые вопросы, ЧАВО Питлаб (часть 1)
дневники я тоже прочел. по ним и делал настройки.
по pwm с другим приемником все работало, но я не хочу опять эту косичку из проводов. раз умеет и приемник и АП работать с SBUS, то я думаю надо все делать по уму).
я там обновил картинки в прошлом сообщении, вдруг все-таки будет мысль, что я там не так настроил. полезу дальше ковырять уже приемник. раз никаких других хитростей нет у АП с входяим подключением SBUS/ спасибо
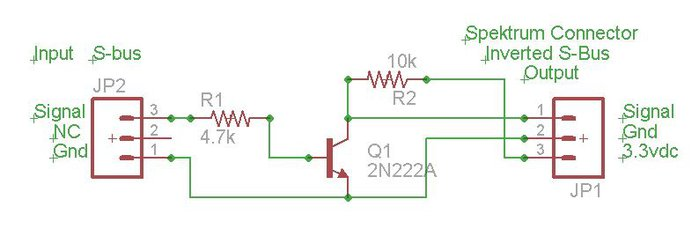
почитал про Хавка, пишут что из него выходит инвертированный S.bus, который может не восприниматься портом UART
нужно городить инвертор… возможно это именно твой случай…
SBUS
On most hardware, this is actually inverted SBUS because a normal UART cannot output real SBUS. If you are using ardupilot and want 16 channels, don’t bother with inverted SBUS and try SUMD instead. But if you need SBUS, see this page to make an inverter: www.rcgroups.com/forums/showthread.php?t=1459431&p… and groups.google.com/forum/#!msg/px4users/gUE6mPISvKA… .
спасибо, буду копать в эту сторону, а пока наверное вернусь к PWM, а то лето кончится)
один транзистор и два резистора, делов на 15 минут…
если количество каналов до 8, сделай СРРМ, это тоже один провод…
Попробуй ppm, вроде прд и прм поддерживают.
8 должно хватить) попробую. в любом случае это лучше чем pwm ( и там такое же ограничение в количестве)
Всем привет!
Имеются два вопроса…
- С приёмника, как я понял, прочитав и питлабовскую инструкцию и дневник Plohish-а (отдельное спасибо ему за отличную и понятную инструкцию!!), я понял, что с каждого канала приёмника на каждый канал АП приходит по проводу (=связке проводов, стандартно: “плюс”, “минус”, “сигнал”). То есть, если грубо говоря, АП стоит как бы в разрыв цепи между приёмником и сервомашинкой. Так вот, возможно ли в АП подключить ещё закрылки, чтобы он управлял и ими, а так же дополнительный канал для сервы, активирующей парашют над точкой (про парашют, скорее всего, перебор, но вдруг возможно это)?
- Я до конца не понимаю, в переписке выше, вы как-то умудряетесь подключать приёмник к АП одним проводком через S.Bus? Если да, тогда вопрос с закрылками, сервами, подвесом и вообще дефецитом каналов отпадает. Владельцы аппы FrSky, кого можно потеребить в личке по этой теме? 😃
****
А, нет, всё-таки вопросов больше 😃
**** - Не совсем по теме. Подскажите, пожалуйста - хочу поставить и курсовую камеру, и камеру на подвесе с виброразвязками, так называемую в народе “пишущую”. Питлабовская Ground Station имеет дивёрсити - штуку, отбирающую лучший из имеющихся двух сигналов. А теперь сам вопрос - возможно ли (и как) скоммутировать эти две камеры так, чтобы можно было переключаться между ними в полёте (читай иметь доступ к этим двум камерам на расстоянии, а не летать постоянно по курсовой и гадать, куда смотрит та, что на подвесе)? Нужно ли для этого таскать ещё второй видеопередатчик (на борту) или где-то хитрим как-то?
- Хотел ещё внедрить микрофон (да, знаю, лишний вес и так далее, но больно стрёмно мне видеть картинку и не слышать гул мотора 😉 ) - его поди просто в бортовой видеопередатчик втыкать (там вроде есть разъём)?
Спасибо!
Привет, тут для начала нужно понимать, какой у тебя вч модуль и приемник.
вообще при использовании PWM сигнала (который есть на всех вч модулях и передатчиках) там каждый канал это отдельный провод(1 штекер состоящий из 3 проводов). sbus и cppm это уже есть не у всех приемников. поэтому тут нужно знать какие у тебя?
я могу ошибаться, но я думаю закрылки и парашюты проще сделать не через АП а просто из приемника. я использую крутилки на апе для поворотов камеры(т.е. просто 2 сервы, в твоем случае это могут быть 2 сервы делающих свои действия будь то паршют или закрылки). так вот, провода управления (рудер, элероны, газ, руль высоты) идут в ап, а другие 2 канала из приеника уходят не на АП а к своим сервам напряму.
надеюсь понятно написал)
возможно есть другие варианты, у меня так)
Даниил Босак
- Понимаешь правильно, АП как раз стоит как ты выражаешься “в разрыве между…” 😃 При таком подключении на АП приходят и уходят с него только основные каналы управления. Но ничего не мешает тебе пустить те же каналы закрылков и парашюта на прямую с приёмника прямо к сервомеханизмам… Питлаб в любом случае не управляет закрылками и не знает что это такое, так же как и парашют… Этого нет в функционале…
- сигнал S.bus это комплексный сигнал, в котором закодированы сразу все каналы на сервы… Приёмник в этом случае подключается к Питлабу всего лишь одним проводом (+, -, сигнал, приёмник должен уметь выводить этот сигнал) и АП выступает в роли “раскодировшика” этого сигнала… Основные каналы он обрабатывает и выводит на выходы, а до четырёх дополнительных каналов просто без обработки выводит на свои выходные штырьки…
- на самолёт можно поставить две камеры и переключаться между ними в полёте, для этого нужен так называемый “камера свитч”, но на землю по любому будет идти один канал видео. Диверсити в наземке служит чтобы принимать один и тот же сигнал с разных приёмников и антенн…
- Микрофон можно приделать, аудио сигнал нужно будет пускать мимо Питлаба, но в этом случае ты лишишься такой замечательной вещи как вариометр (звуковое оповещение о спуске и подъёме), что на мой взгляд гораздо важнее чем “послушать двигатель”
Всем привет.
пересобрал питлаб на стареньком скае, чтобы в полной мере тестить возможности. летает, честно говоря криво, но я думаю это проблемы именно в самом носителе. похоже, что криво склеен хвост, в общем это уже другие проблемы.
слетал на 1600 метров, на высоте 200-300 метров, впечатления от таких первых полетов весьма приятные.
на таком удалении поймал фейлсеф( а сам фейлсейф не настроенный)собирался полетать над головой)) , но связь почти сразу восстановилась, и я чтобы не потерять связь опять решил врубить возврат домой. все по инструкции переключатель в авто, стик газа в минимум, на экране нет сообщения о подрежиме( т.е. только авто написано, нет указания какой режим авто включен) и самолет летал по кругу, пришлось возвращать вручную.
собственно первый вопрос, почему может отсутствовать указать на подрежим режима авто? в меню осд в фпв менеджере, тыкал, искал, но так и не нашел что это за пункт, и где он. подскажите куда копать? или чожет можно скинуть ваш файлик конфигурации ОСД.
вопрос второй, почему может не корректно срабатывать возврат домой? самолет начинает летать по кругу, хотя я думаю этот вопрос станет понятен, после того как смогу увидеть в каком режиме на данный момент самолет, но все-таки, почему так может быть?
еще если кому не сложно и у кого есть ,можете сфоткать, снять видео, или схему нарисовать как устроена готовая, конкретно ваша, рабочая наземная станция. что к чему и в какой последовательности, и из чего она состоит.
подрежим у тебя не выведен на экран по умолчанию, включить его можно через FPV_manager, ищи в настройках элементов экрана Navigation mode
вопрос понимешь правильно, когда увидишь подрежим, сразу станет понятно что произошло…
Газ у тебя в какой канал воткнут? (физически проводок) - этот момент должен быть строго по инструкции!
летать с не настроенным FS категорически не советую, потеряешь и самолёт и всё остальное…
сейчас FS уже настроен, на земле отрабатывает правильно, но столькео на сколько это можно проверить на земле, вырубаю передатчик в режиме стаб или офф, и вижу что ап переходит в режим авто. пока только так удалось проверить.
еще вопрос по работе режима TAKE OFF
правильно ли я понимаю, что он работает следующим образом. включил питание, запомнил базу, проверил работу всех систем, с аппы включил режим “помощник взлета”,далее включаю газ на полную и запускаю. он сам будет дальше регулировать крен, набор высоты, до тех пор пока не наберет заданную высоту. вопрос именно про то что стик газа нажно воткнуть на полную или как? и запускать. и после этого я могу вообще не управлять взлетом? так?
Сергей, подскажи, пожалуйста. на какои видео передатчике летаешь и какие антенны стоят? и какая антенна на приемнике? я уже чувствую, как мне начинает не хватать того что есть) 2 км и видео отваливаетс, летаю на китайском передатчике 5.8 600 mw на штатной сосиске
и еще один вопрос, кто-нибудь ставил его на двух моторные самолеты? нормально дружит с ними? проблем не будет?
планирую в зиму сесть за сборку уже хорошего комплект, и вот выбираю, между талоном 2020 или mytwindresm. в принципе оба носителя мне нравятсся, не хочется, чтобы проблемы вылазили на этапе сборки. вижу что MTD многие собирают на 6-ти баночных батареях, а для питлаба это вроде перебор, придется все питать через бэки?
У меня твиндрим летает с питлабом замечательно. Батарея 4S.
Ты лучше для начала на земле проверь включение режима возврата вручную, чтобы ты и подрежим тоже видел…
Take понимаешь правильно, количество газа зависит от самолёта, кому то нужен полный, кому то 75%
АП будет удерживать крен и тангаж с набором… Вручную так же можно во время взлета корректировать и крен и тангаж… Стики работают…
На двухмоторниках люди прекрасно летают, естественно при батареях более 3s будет нужен бек для питания ОСД, или отдельная батарея…
Я летаю на Таранисе + ЛРС на 433Мгц и видео 1.2 на приеме патч, на передаче на самолете Vee
наземку расписать смогу дней через пять…
хорошо, спасибо, буду ждать.
победил проблему с режимом. режим был включен в настройках ОСД, но почему -то все равно не отображался. попробовал обновить прошивку, правда с одинаковой версией, но все равно. проблема не решилась,
в итоге сделал так, что записал на ОСД на все профили пустой экран, и потом заново записал дефолтный F16, и все заработало. до этого пытался просто на другие профили записывать этот же дефолтный F16, но не работал.
но в итоге проблема решена. спасибо)
новый вопрос)
а как изменить имя(пилота) которое видно на экране ОСД? у меня там интернет адрес магазина где я покупал, и хоть убей не могу найти где это меняется
Имя - это Callsign, меняется в меню Settings во вкладке OSD в FPV Manager.
Я свой покупал напрямую у разраба (pitlab.com) так мне вписали мой ник, был очень приятно удивлен 😒
я покупал у Кирилла, думаю все знают где это. вот в имени адрес сайта указан.
пусть считаю, что это лишнее и навязчиво. но все равно я благодарен ребятам, что посоветовали именно питлаб) ехал я вообще за фишкой) уже на месте в магазине стоя перед 3 коробками, питлаб, игл, и фишка, выслушав все плюсы я выбрал питлаб) и конечно же не пожалел ни на минуту) хотя уверен, что я еще использую его потенциал процентов на 10)
При просмотре видео в ветке вижу на экране OSD фигурку самолёта, с перемещающейся точкой. Думаю, что точка показывает расположение базы относительно самолёта. У меня это не отображается. Подскажите, как включить.
ОСД полностью настраивается через FPV-manager, в том числе и этот квадратик включается… В двух вариантах…