PitLab FPV System: OSD+Autopilot+Ground station

Пожалуйста, проверьте настройку FPV_manager-> OSD-> Settings, должна быть установлена рамка «Menu RC Input» «(*) OSD direct input or Autopilot», возможно, выбрана настройка для внешнего контроллера (например, Pixhawk) »(*) Mavlink RC channel"
Спасибо ,понял утром проверю , может быть я пробовал ХД Линк подключить и менял в менеджере настройки.
Во всю летаю изучаю. Постараюсь моменты технички выкладывать сюда. Спели фпв моделей полукопий самолет мой сложный в некоторых моментах были опасения. Небольшая презенташка)))
Заход приборно по ILS с видом на крыло, тренировка.
Сергей огромное тебе спасибо за помощь ,сделал как ты написал и все теперь функционирует нормально
Сергей огромное тебе спасибо за помощь ,сделал как ты написал и все теперь функционирует нормально
если лазим шаловливыми руками, не забываем что делали! 😃
тренировка.
красавчег! 😃
Заход приборно по ILS с видом на крыло, тренировка.
Олег,как включить такую шкалу по крену,а то одни горизонтальные линии,уже все варианты перепробывал(вроде-бы)
тип горизонта выбрать другой
но имей ввиду, этот горизонт “обратный” по отношению к Европейскому!!!

За то , он сразу и индикатор крена))) мне так привычно. Кстати хочу отметить , что данная осд и этот горизонт позволяет на порядок точнее выдерживать углы и крены , для тех кому приборно летать интересно, стабилизация прекрасно держит мой самолет в крене 30 град, без просадки высоты. Замечу что при таком крене раньше до 50 метров на крыло скользил.
Заход , ориентироваться на точку. Расстояние ее от впп устанавливается только в настройках осд автопилота.
Мне тоже есть чем с Вами поделиться, это касаемо любителей режима ,автопосадка,. С моим товарищем по хобби ,prokop, (Павлом) мы попробовали сажать (мини талон) с разным углом глиссады, 3° , 4° и 5° в настройках . Результат был интересный ! Рассказываю. Все измерения проведены в один день, с небольшой разницей по времени. С настройками глиссады 3° самолёт практически летит в горизонте, достаточно на малой высоте, далее он не долетает до точки контакта в настройках метров так 25 и сажает (до начала полосы) в траву. Это повторялось несколько раз подряд. При глиссаде в 5° самолёт отлично подлетает с запасом по высоте и в последний момент выключается мотор, прямо над местом контакта полосы в настройках и через 20 метров просто планирует с интенсивным снижением и плюхается достаточно жёстко об землю . Идеально происходит посадка с настройками 4°, но при этом самолёт также пролетает пятно контакта в настройках , как и при 5° . Прилагаю схему . Место контакта в настройках находится в середине полосы. Если интересно имеется видео 😃 . В будущем я буду анализировать посадки и делиться с Вами результатами. А как Ваш FPV носитель себя ведёт в режиме,автопасадка, ?
Лешь привет, Угол глиссады это этап расчёта снижения автопилотом что бы держать данный угол . Не важно 3 или 5 он должен к точке выходить. Значит при 3 градусах нужно путем подбора ВПП торец было сдвигать дальше по направлению захода. Но по сути для модели и 4-5 норм более чем, только получается момент приземления ты регулируешь углом глиссады. Большие вобще с 2,4 углом заходят))
Я тоже попробовал несколько заходов в авто режиме посадки, угол 4 но свинул на 50 метров торец по направлению, а то низковато шел и в деревья мог залететь, так как у меня еще настройки нужно покрутить, плохо курс держит и на большом удалении 5-7 км хорошо идет ровно но как подходит за 1500 м к впп то начинает за планками бегать и не успевает что приводит к галсам и так не зайдет в створ и влетит в деревья. А вот на руках я довольно точно к впп подхожу. Но я попробовал на разные полосы сажать и что важно. Надо не угол регулировать и сдвигать торец при условии если важен пологий заход Так как подходя к нему Приборно ты будешь выше глиссады, а на автомате автопилот будет в глиссаде и недолет будет и поэтому я торцы сдвинул , теперь нужно попробовать на руках сначала придти ровно по планкам а потом подбирать, а не утверждать, что именно угол влияет на долет или перелет. А так ты просто в ручную упреждение задаешь поднимая угол для верного тебе приземления.
Я 99% летаю только на руках в стабилизации и мне авто режимы не нужны. Но у пит лаба замечательно функционал сделан. И прекрасно работает режим удержания. А суть в том что тут 1-стабилизация и много режимный 2-автопилот получается. Тоесть когда Ты переключаешь auto это и есть автопилот и в нем уже задаешь режимы , удержание , полет по маршруту, автоосадку и тд. Поэтому я пристрастился к режиму удержанию и в полете высоту и курс задаю. Нравится что система очень плавно все это делает. Жаль только скорость нельзя менять и Сбигнев не планирует делать удержание скорости. Моей модели динамический газ подходит при прочих настройках, но скорость гуляет от 56 до 85 км в час. Понятно что Скай не будет в таком диапазоне летать, но не все же на скаях летают. Та же Fy41 курс мертво держит и прекрасно скорость поддерживает +/-5 км в час . Но я всеровно во всех своих моделях начал менять автопилоты на Питлаб, самолет с ним более функционален и современнее по приборам и прочим.
В наборе и удержании горизонта я добился более менее скорости , а вот при снижении не получается и не получится в данном алгоритме работы настроек динамического газа.
Система как только задумала снижение, а оно с углом -3-4 плавно снижаясь то скорость резко у меня падает до 56 км в час и ток что удалось максимум поднять это от 3-5 ампер , при более крутом снижение это норма, а тут почти горизонт и плавное снижение что действительно мало и нужно 7-9 ампер хотябы. Делать газ на постоянную работу тоже плохо меня на снижении скорость будет за 100 км в час. Так что , что есть пока . Но все остальное очень прекрасно работает, особенно стабилизация.
Шутки от питлаба. Будьте внимальны. В первом комплекте норм, а вот второй пришел и упсс.
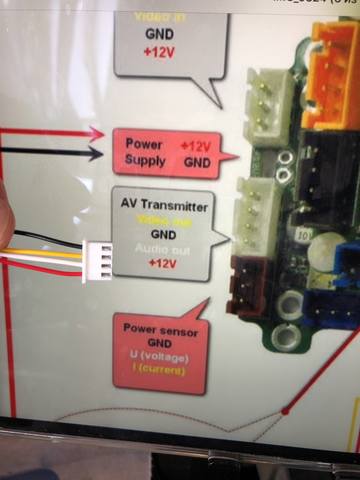
что то я не помню, что-бы в комплекте шли провода на трансмиттер…
что то я не помню, что-бы в комплекте шли провода на трансмиттер…

Я перекинул пины. Просто я их скручиваю и припаяиваю серво разьем, но по привычке распиновку по цветам проверяю. А то было уже у китайцев на жпс модулях путаница.
ты же покупал комплекты автопилота а не отдельно OSD, а там этого нет…
по привычке распиновку по цветам проверяю
это правильно, никто не застрахован от ошибок!
Сегодня в дождик прекрасно полетал, трясло но Питлаб замечательно работает в стабилизации. Немного настроив стал лучше курс держать . Нравится что можно сразу после взлета включить автопилот на удержании и задавать курс и высоту. Все прекрасно, но Динамический газ нормально настроить не удается. Питлаб не умеет поддерживать скорость, есть только простейший алгоритм работы. Многие летая на пенолетах не поймут потому что там что 15ампер что 3 ампера летит почти одинаково. Настройки влияют только для набора и горизонта причем значения в меню не соответсвует действительности, и логика не ясна. Почему границу сваливания в % нельзя поставить выше лимита газа? Они поднимутся оба, а меняя лемит газа почему то влияет на набор высоты тягой двигателя. А вот что интересно, удержание высоты в % можно поднять выше лимита газа))) . Алгоритм работы прост. У Питлаба есть три режима работы газом и в каждом режиме дельта около 10%. И на этом все.
Например. Летим в удержании высоты. Ток 9-11 ампер что удалось настроить так и будет в этих значениях для горизонта.
Набор пусть даже не большой то сразу переход в лимит газа и тут у меня15-17 ампер. Ладно .
А вот снижение режим-сразу ток падает до 3-5 ампер и не будет выше прыгать и этот момент я не могу отрегулировать. На снижении у моего самолета скорость меньше чем в горизонте, ведет на пределе, норм но хочется чуть быстрее.
Эксперемент. Лечу и разворот в удержании делаю по ветру, меняю высоту на снижение 350 м. Самолет плавно снижается и ток 3,5 а. Но при этом выросла скорость, все бы ничего но самолет пропускает 350 м и на 3-5 метров ниже ушел, и для такого пустячного набора он переходит на 17а для набора, а скорость была 80 то стала 100. Разброс скоростей у меня в среднем при его работе от 57-86 в среднем. Жаль что производитель отказывается сделать работу поддержки скорости. Все в остальном замечательно но при условии настроек.
iLS
Мне интересно Збигнев кроме как летая на скае пробовал еще на чем то по быстрее. Потому что есть предложение увеличить расстояние виртуальной точки для автозахода по Ils в автт режиме. Там есть точка к которой он стремиться и только подойдя к ней начнет за планками к впп лететь. Но точка имеет настроечное расстояние, 300-1000 метров, это нормально для 40 км в час, а когда 80-90, то самолет плавает за планками ему надо чуть дальше расстояния для того что бы успеть выравниться на курс. До 1500-2000 метров сделать заход в горидор для моделей летающих выше 40-50 км в час.
Тут в режиме удержания auto на pitlab меняя курс и высоту по приборам И за 1000 метров уже на руках посадка.
режим газа “динамический” предназначен для максимальной экономии “топлива”, по этому при снижении Питлаб выдерживает горизонтальное положение самолёта и при этом снижаясь держит минимальный газ для устойчивости. Твой самолёт не падает, не штопорит, но ты очкуешь!
Разраб тебе ответил, этот режим создан для самолётов, которые даже при нулевом уровне газа могут лететь в потоке и снижаться по траектории к базе…
Для твоего самолёта нужно выбирать управление газом - “постоянный”
вот здесь на 16:17 включаю режим “АВТО” и газ вообще выключается!
о чем это говорит? О том что если траектория снижения к базе позволяет, Питлаб поддерживает минимальное устойчивое положение самолёта газом!
Если это планер, он отключит его вообще… Если это неустойчивая БД, он поддерживает ток 3-5 ампер…
Тут
А на 1:05 это пассажирский самолет?
А на 1:05 это пассажирский самолет?
Нет, иногда военные там садятся за 10 км и то в выходные они обычно не летают , а так редко. У нас в основном мотодельты , мы с ними договариваемся при посадках и летаем в безопасных карманах , поэтому куда хочешь там летать нельзя.