PitLab FPV System: OSD+Autopilot+Ground station

Какой нафиг баг? Нефиг менять каналы на своё усмотрение! Ещё раз спрашиваю ВЫХОДНЫЕ провода как подключены?
Выходные подключены правильно, согласно маппингу - как-то же летаю, газ с руддером не перепутаны. А баг есть: маппинг позволен (что значит нефиг менять? есть возможность, значит можно менять), но не учитывается, видать хардкодно прошит номер канала.
Выходные подключены правильно, согласно маппингу
провода нужно подключать согласно ИНСТРУКЦИИ а не маппингу!
Я точно так же как и огромное количество пользователей летаю по Sbus но у меня багов нет! Вы в состоянии ответить на простой вопрос, в какой именнно канал вторнут проводок от регуля и как у вас там всё перемаплено?
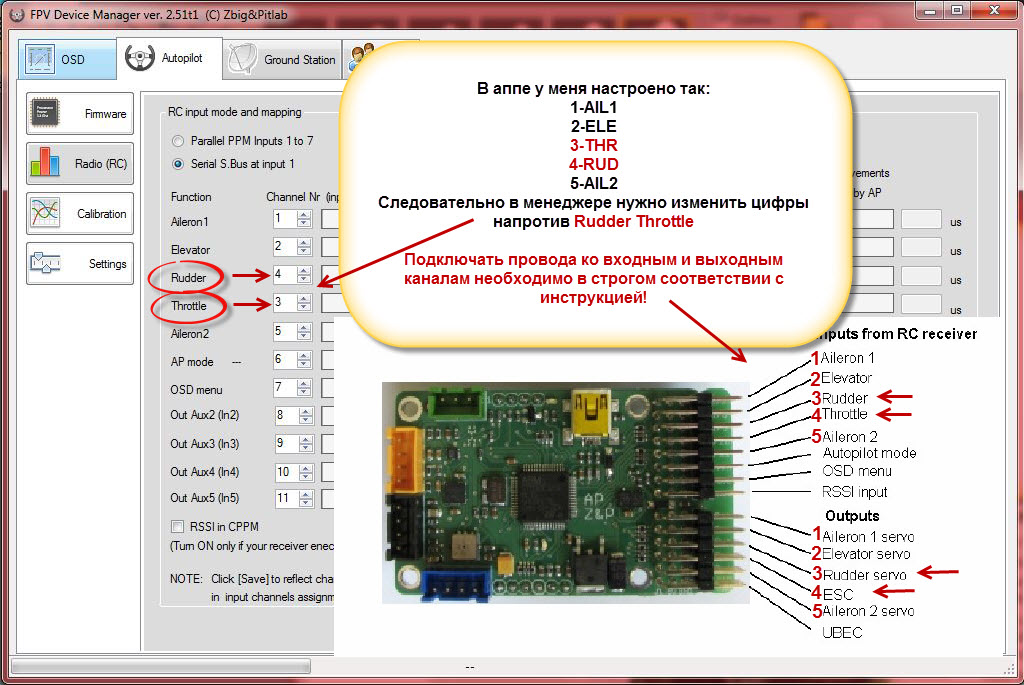
У меня в аппе:
1-AIL1
2-ELE
3-THR
4-RUD
5-AIL2
Не смотря на это провода нужно подключать строго по ИНСТРУКЦИИ:
1-AIL1
2-ELE
3-RUD
4-THR
5-AIL2
а в менеджере просто поменять две цифры на 3 и 4 канале…
Провод на регулятор подключен 4й разъем.
На серву руддера в 3й.
S.Bus промаплен в менеджере:
1 - элерон, 2 - элеватор, 3 - газ, 4 - руддер, 5 - элерон
Не работает.
покажите пожалуйста скрин настройки каналов в менеджере и списком как настроено в аппе…
может мы не понимаем друг друга
Вечером выложу
Кликабельно
Именно так и сделано.
В менеджере проставлены правильные каналы,
выходы 3 - руддер, 4 - двигатель
вход подключен ТОЛЬКО 1 - на 1й пин заведен SBus с приемника.
В аппе:
1й элерон,
2й элеватор
3й тяга
4й руддер
5й элерон
6й режим
7й OSD
(если что - 8й поворот камеры)
давай так, подключаешь АП к компу через USB, подключаешь батарею питания АП
включаешь режим “авто” и двигаешь стиком газа, на экране видишь в каком канале бегает зелёная полоска…
только что проверил у себя
Все верно двигается - канал с надписью Throttle. Я еже как-то летаю в стабе и без АП, при неправильном коннекте оно бы в стабе не летело.
Такое ощущение, что я чего-то недопонимаю в самой логике включения возврата, может там лимиты какие по дальности, высоте еще чего?
Я больше чем уверен, что беда в не установленных энд поинтах каналов в менеджере. Если бы канал был перепутан, он бы не взлетел. Мало того, так рег не видя ноль, незаармил бы вообще.
Подключите всё и пройдите настройку нажав на кнопку “EPA/ servo travel”, при этом не забудьте все каналы на аппаратуре включить на полные расходы.
Все верно двигается - канал с надписью Throttle. Я еже как-то летаю в стабе и без АП, при неправильном коннекте оно бы в стабе не летело.
Такое ощущение, что я чего-то недопонимаю в самой логике включения возврата, может там лимиты какие по дальности, высоте еще чего?
Ваш ответ это результат эксперимента или просто логическое заключение? Какую аппаратуру управления используете?
Сделайте такое же видео как сделал я, сразу все станет понятно…
Если бы канал был перепутан, он бы не взлетел. Мало того, так рег не видя ноль, незаармил бы вообще.
Если допустим газ подключить физически проводком к третьему выходу а руддер к четвертому, и в аппаратуре каналы будут настроены так же, в ручном управлении и стабе легко летается без проблем…
А вот с Авто все будет плохо…
END point могут быть виноваты, если расходы зажаты и оставлено процентов 20… В это как то слабо верится… Нужно видео… В менеджере есть цифры длительности импульса, по ним будет все понятно…
Сергей, стик газа в “нижнем” положении, какую длительность импульса показывает FPV_manager?
возможно проблема банально в неоткалиброванном стике газа…
сидел. думал… эндпоинты (которые настраиваются у Питлаба по кнопочке) тут вообще думаю ни причём… они задают конечные точки работы плоскостями самим автопилотом, но не стиками аппы…
Здесь вина самой аппы, она не даёт нужную длительность импульса по каналу газа…
в субботу проверю, может проблема в отсечке газа: 850мс, возможно, мало. Или, еще мысль, что проблема в гористой местности, и я включал режим с отрицательной высотой от базы. Буду пробовать.
Я думаю что уровня газа ниже 1100 микро секунд будет достаточно для включения режима автовозврата
Подключи к компу да посмотри…
“горный режим” тут тоже вряд ли виноват, в горном режиме при подъёме перед возвратом дополнительный значок выглядит так - “↑”
кстати тоже проверить очень просто, в “авто” мы имеет три режима в зависимости от положения стика газа - возврат, удержание высоты и направления, кружение над точкой.
Все эти режимы имеют свой дополнительный символ - “base”, “hold”, “*”
если стик газа двигать к середине, к максимуму что ни будь меняется в дополнительном “знаке” на OSD возле режима “auto” ?
ещё кстати одна вещь подумалась, а не включена ли у тебя опция “Use throttle trim” ?
отключи если она включена и ещё раз сохрани триммеры…
На счет энд поинтов я с питлабом можно сказать собаку съел.
Рег у меня кастл эдж, в реге есть калибровка нижней точки.
При этой калибровке нужно поднимать нижнюю точку газа в аппаратуре, до тех пор пока это не увидит регуль и незаморгает ледом.
Ну я провел эту процедуру и значение не придал.
После этого не работал возврат домой…
Хотя казалось бы, я точку задрал на несколько кликов…
На счет энд поинтов я с питлабом можно сказать собаку съел.
Рег у меня кастл эдж, в реге есть калибровка нижней точки.
При этой калибровке нужно поднимать нижнюю точку газа в аппаратуре, до тех пор пока это не увидит регуль и незаморгает ледом.
Ну я провел эту процедуру и значение не придал.
После этого не работал возврат домой…
Хотя казалось бы, я точку задрал на несколько кликов…
всё правильно, ты приподнял нижний предел допустим до 1300 миллисекунд, вот возврат и не работал, как в этой ситуции поможет сохранение энт поинт (EPA/ServoTravel) в Питлабе я не понимаю… на мой взгляд никак…
EPA/ServoTravel как раз и настраивает, как автопилот будет оценивать входящий сигнал.
Допустим на вход поступает сигнал от 1400 до 1800. Но в системе настроен диапазон от 1300 до 1800 (допустим). Значит автопилот никогда не увидит “нулевой газ”.
Противоположный пример когда аппаратура выдаёт от 1000 до 2000, а в автопилоте по прежнему настроен от 1300 до 1800. Тогда у стика в начале хода и в конце появятся мёртвые зоны, на которые автопилот не будет реагировать. (К стати судя по видео, у тебя именно этот случай).
Так вот EPA/ServoTravel и настраивает эти самые “от 1300 до 1800”… это ни разу не константы.
EPA/ServoTravel как раз и настраивает, как автопилот будет оценивать входящий сигнал.
Допустим на вход поступает сигнал от 1400 до 1800. Но в системе настроен диапазон от 1300 до 1800 (допустим). Значит автопилот никогда не увидит “нулевой газ”.
Противоположный пример когда аппаратура выдаёт от 1000 до 2000, а в автопилоте по прежнему настроен от 1300 до 1800. Тогда у стика в начале хода и в конце появятся мёртвые зоны, на которые автопилот не будет реагировать. (К стати судя по видео, у тебя именно этот случай).
Так вот EPA/ServoTravel и настраивает эти самые “от 1300 до 1800”… это ни разу не константы.
мне кажется ты не прав, EPA/ServoTravel настраивает конечные точки для работы собственно самого АП, т.е. если на аппе настроено 1000-2000, после прогона через EPA/ServoTravel автопилот в автоматическом режиме и будет “махать” поверхностями с максимальным отклонением 1000-2000 естественно если это ему понадобится… сделаешь меньше- будет “махать” меньше…
А ко входному сигналу это никак не относится…